一种多方位自动化机械手的制作方法
本技术涉及自动化机械手,更具体地说,本技术涉及一种多方位自动化机械手。
背景技术:
1、机械手是一种能模仿人手和臂的某些动作功能,用以按固定抓取、搬运物件或操作工具的自动操作。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手各自的优点,机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化。
2、中国专利申请号cn202110379510.4公开了一种机械自动化用多方位调节的抓取机械手装置,包括竖臂,所述竖臂的顶部固定安装有传动台,所述传动台的左侧固定安装有第一伺服电机。该机械自动化用多方位调节的抓取机械手装置,其结构精简,方便进行维护处理,并且便于灵活控制来进行多方位调节使用,从而有效的解决了现有机械手结构复杂且精细度高,容易使得维护麻烦费时费力的情况,并且多方位调节较为繁琐的问题;
3、该多方位调节的机械手在使用过程中,虽然其机械手可以进行多方位的调节,但是调节机构占用空间较大,当需要机械手在狭小空间内部进行使用时,其不方便在狭小空间对机械手进行旋转和角度翻转,导致其无法在狭小空间内部使用。
技术实现思路
1、本实用新型技术方案针对现有技术解决方案过于单一的技术问题,提供了显著不同于现有技术的解决方案。为了克服现有技术中的问题缺陷,本实用新型提供一种多方位自动化机械手,以解决上述背景技术中提出的问题。
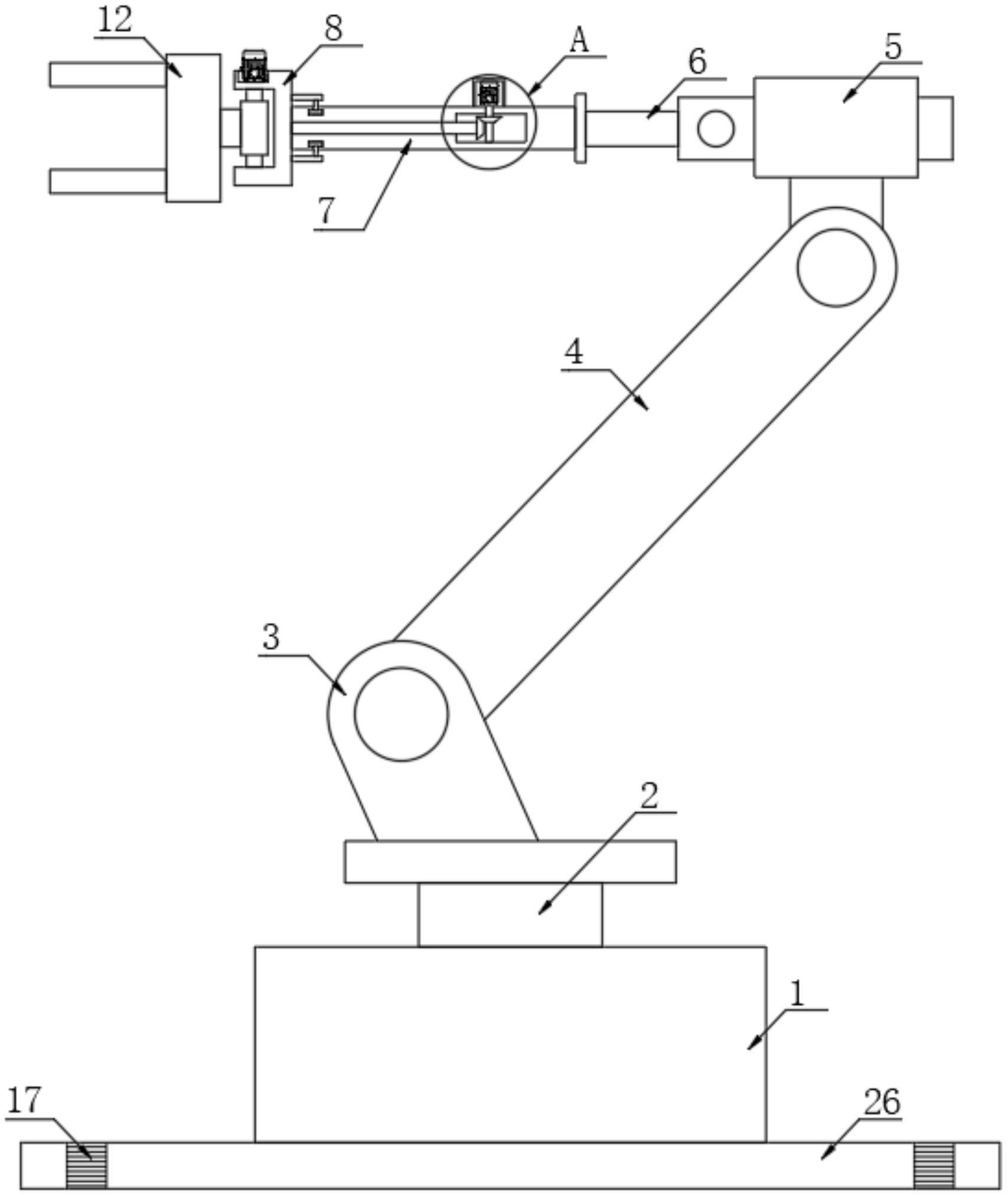
2、为实现上述目的,本实用新型提供如下技术方案:一种多方位自动化机械手,包括底座,所述底座顶部转动连接有转动座,所述转动座顶部安装有机架,所述机架顶部设置有转动臂,所述转动臂顶部设置有调节机构;
3、所述调节机构包括第一固定套,所述第一固定套设置在转动臂顶部,所述第一固定套内部安装有气缸,所述气缸一侧设置有连接柱,所述连接柱一侧设置有连接套,所述连接柱内部开设有内腔,所述连接套与连接柱之间设置有旋转轴,所述旋转轴一端设置有第一伞齿轮,所述第一伞齿轮顶部啮合有第二伞齿轮;
4、所述连接套一侧安装有机械手,所述连接套与机械手之间设置有转动机构。
5、优选地,所述连接柱顶部安装有固定壳,所述固定壳内壁顶部安装有第一电机,所述第一电机输出端设置有转动轴,所述转动轴与第二伞齿轮之间固定连接。
6、优选地,所述旋转轴与连接柱之间转动连接,所述旋转轴一端贯穿连接柱并延伸至内腔内部,所述第二伞齿轮和第一伞齿轮均设置在内腔内部。
7、优选地,所述转动机构包括旋转杆,所述旋转杆安装在连接套内部,所述连接套顶部表面开设有凹槽,所述凹槽内部安装有第二电机,所述旋转杆设置在第二电机输出端。
8、优选地,所述旋转杆外侧固定设置有第二固定套,所述第二固定套一侧与机械手之间连接有连接板。
9、优选地,所述连接柱外侧表面开设有环形滑槽,所述环形滑槽内部设置有两个滑块,两个所述滑块顶部均设置有连接杆,所述连接杆一端与连接套一侧固定连接。
10、优选地,所述底座底部设置有安装板,所述安装板顶部表面开设有螺纹孔。
11、本实用新型的技术效果和优点:
12、1、通过设置调节机构和转动机构,可以通过第一电机带动第二伞齿轮和第一伞齿轮旋转,从而使旋转轴带动连接套旋转,从而达到在狭小空间内对机械手进行旋转调节的效果,通过第二电机带动旋转杆旋转,从而带动机械手进行角度翻转,与现有技术相比,可以在狭小空间内部对机械手进行自旋转,完成角度调节,同时在狭小空间内部对机械手进行翻转,使机械手可以在狭小空间内部进行多方位的调节和移动,提高机械手的使用效果和适用性,解决了机械手不便在狭小空间进行多方位调节和使用的问题;
13、2、通过设置气缸,可以通过气缸调节连接柱和机械手的长度,从而便于调节机械手的伸长总长度,提高机械手适用性,同时可以通过安装板上的螺纹孔与外界螺栓相配合对整体机械手进行安装。
技术特征:
1.一种多方位自动化机械手,包括底座(1),其特征在于:所述底座(1)顶部转动连接有转动座(2),所述转动座(2)顶部安装有机架(3),所述机架(3)顶部设置有转动臂(4),所述转动臂(4)顶部设置有调节机构;
2.根据权利要求1所述的一种多方位自动化机械手,其特征在于:所述连接柱(7)顶部安装有固定壳(14),所述固定壳(14)内壁顶部安装有第一电机(15),所述第一电机(15)输出端设置有转动轴(16),所述转动轴(16)与第二伞齿轮(11)之间固定连接。
3.根据权利要求1所述的一种多方位自动化机械手,其特征在于:所述旋转轴(9)与连接柱(7)之间转动连接,所述旋转轴(9)一端贯穿连接柱(7)并延伸至内腔(13)内部,所述第二伞齿轮(11)和第一伞齿轮(10)均设置在内腔(13)内部。
4.根据权利要求1所述的一种多方位自动化机械手,其特征在于:所述转动机构包括旋转杆(18),所述旋转杆(18)安装在连接套(8)内部,所述连接套(8)顶部表面开设有凹槽(21),所述凹槽(21)内部安装有第二电机(22),所述旋转杆(18)设置在第二电机(22)输出端。
5.根据权利要求4所述的一种多方位自动化机械手,其特征在于:所述旋转杆(18)外侧固定设置有第二固定套(19),所述第二固定套(19)一侧与机械手(12)之间连接有连接板(20)。
6.根据权利要求1所述的一种多方位自动化机械手,其特征在于:所述连接柱(7)外侧表面开设有环形滑槽(25),所述环形滑槽(25)内部设置有两个滑块(24),两个所述滑块(24)顶部均设置有连接杆(23),所述连接杆(23)一端与连接套(8)一侧固定连接。
7.根据权利要求1所述的一种多方位自动化机械手,其特征在于:所述底座(1)底部设置有安装板(26),所述安装板(26)顶部表面开设有螺纹孔(17)。
技术总结
本技术公开了一种多方位自动化机械手,具体涉及自动化机械手技术领域,包括底座,所述底座顶部转动连接有转动座,所述转动座顶部安装有机架,所述机架顶部设置有转动臂,所述转动臂顶部设置有调节机构;所述调节机构包括第一固定套,所述第一固定套设置在转动臂顶部,所述第一固定套内部安装有气缸,所述气缸一侧设置有连接柱。本技术通过设置调节机构和转动机构,可以在狭小空间内部对机械手进行自旋转,完成角度调节,同时在狭小空间内部对机械手进行翻转,使机械手可以在狭小空间内部进行多方位的调节和移动,提高机械手的使用效果和适用性,解决了机械手不便在狭小空间进行多方位调节和使用的问题。
技术研发人员:白聚勇,董国辉
受保护的技术使用者:江西省致能智造产业技术研究有限公司
技术研发日:20230504
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!