一种用于大负载的机器人关节的制作方法
本技术涉及机器人关节领域,尤其涉及一种用于大负载的机器人关节。
背景技术:
1、机器人关节是指机器人的各个部分连接的可转动的接头,是实现机器人运动和操作的重要组成部分。旋转关节是最基本的机器人关节,它可以使机器人的臂伸展并绕机器人的基础部件进行旋转。通常,旋转关节通常由两个主要部分组成:关节驱动部分和关节支持部分。关节驱动部分由机器人驱动器组成,而关节支持部分则类似于传统的万向节,可以在多个方向上提供支撑和运动自由度。
2、而现有的机器人为了增加转动方向,各个关节处通常采取电机进行驱动转动,而在拿取重物时,则靠近底座处的关节需要承受更大的力以进行支撑,使得机器人处理重物有限,一些机器人虽然采取液压缸进行驱动旋转,但是其旋转角度有限,降低使用范围。
3、为解决上述问题,本申请中提出一种用于大负载的机器人关节。
技术实现思路
1、(一)实用新型目的
2、为解决背景技术中存在的技术问题,本实用新型提出一种用于大负载的机器人关节,本实用新型通过设有调节机构,利于增加机械臂的负载能力,同时增加转动范围。
3、(二)技术方案
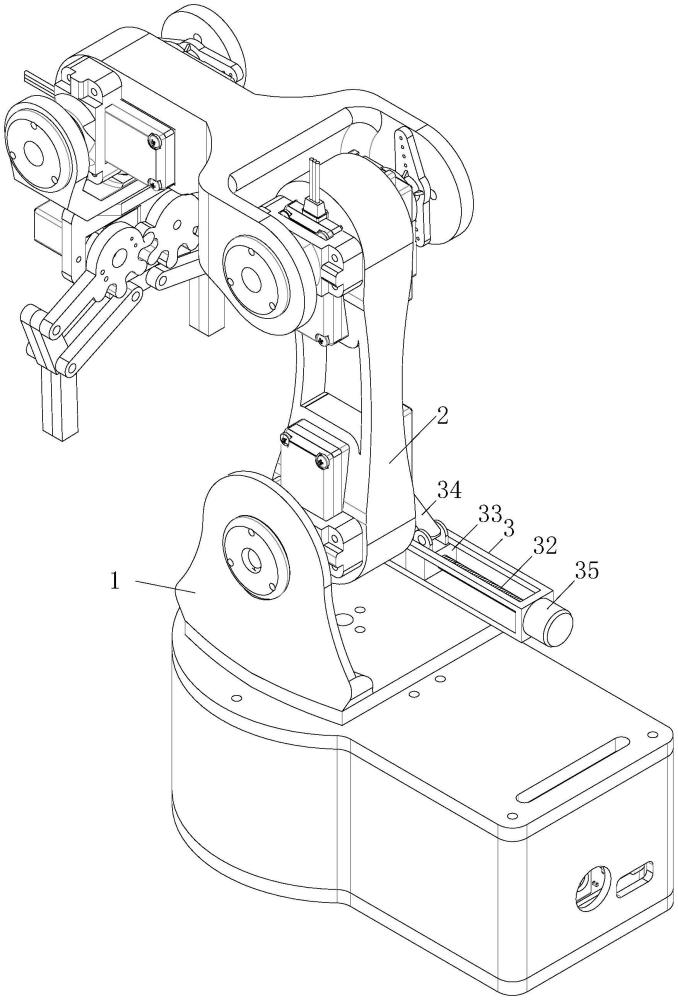
4、为解决上述问题,本实用新型提供了一种用于大负载的机器人关节,包括底座,所述底座上通过转轴转动连接有机械臂;
5、所述底座上设有用于大负载调节机械臂转动范围的调节机构。
6、优选的,所述调节机构包括安装框、螺纹杆、滑块和液压缸,所述安装框固定安装在底座上,所述螺纹杆转动设置在安装框内,所述滑块螺纹套接在螺纹杆上,并与安装框滑动连接,所述液压缸的一端与滑块铰接,所述液压缸的另一端通过转轴与机械臂转动连接,所述安装框上设有用于驱动螺纹杆转动的驱动电机。
7、优选的,所述驱动电机通过减速机与螺纹杆连接。
8、优选的,所述滑块的底部转动套接有与安装框滚动连接的滚球。
9、优选的,所述安装框的顶部开设有用于液压缸在水平方向移动的开口。
10、本实用新型的上述技术方案具有如下有益的技术效果:
11、通过启动驱动电机,驱动电机带动螺纹杆转动,螺纹杆带动滑块移动,以带动液压缸在水平方向移动,改变液压缸的位置,以在启动液压缸时,对机械臂的使用角度进行调节,增加调节范围,同时增加负载能力。
技术特征:
1.一种用于大负载的机器人关节,包括底座(1),其特征在于:所述底座(1)上通过转轴转动连接有机械臂(2);
2.根据权利要求1所述的一种用于大负载的机器人关节,其特征在于,所述驱动电机(35)通过减速机与螺纹杆(32)连接。
3.根据权利要求2所述的一种用于大负载的机器人关节,其特征在于,所述滑块(33)的底部转动套接有与安装框(31)滚动连接的滚球。
4.根据权利要求2或3所述的一种用于大负载的机器人关节,其特征在于,所述安装框(31)的顶部开设有用于液压缸(34)在水平方向移动的开口。
技术总结
本技术涉及机器人关节技术领域,且公开了一种用于大负载的机器人关节,包括底座,所述底座上通过转轴转动连接有机械臂;所述底座上设有用于大负载调节机械臂转动范围的调节机构。本技术提出一种用于大负载的机器人关节,本技术通过设有调节机构,利于增加机械臂的负载能力,同时增加转动范围。
技术研发人员:韩非,马鹏程,周大川,刘庞威
受保护的技术使用者:南京泰岱智能装备研究院有限公司
技术研发日:20230505
技术公布日:2024/5/6
- 还没有人留言评论。精彩留言会获得点赞!