一种用于机器人的行走机构的制作方法
本技术主要涉及人工智能机器人的,具体为一种用于机器人的行走机构。
背景技术:
1、机器人是一种自动化机器,不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器,机器人可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率质量,服务人类生活,扩大延伸人的活动及能力范围,其中有的机器人称为人工智能机器人,因为它有相当发达的“大脑”,在脑中起作用的是中央处理器,通过计算机程序来呈现人类智能,可以进行按目的安排的动作。
2、在如今现有的机器人中,例如类似“人形”结构的机器人,在行走的过程中,若遇到凹凸不平的地面或者需要爬楼梯的情况,由于“人形”结构的机器人是直立行走,只有两个支撑点,在凹凸不平的地面上很难保持平衡,容易摔倒,还有就是面对爬楼梯的情况,也是目前直立行走的机器人要面对的一大难题,由于机器人在爬楼的过程中,距离台阶面的重心不断在变化,也极易失去平衡,造成摔倒,损坏。
技术实现思路
1、本实用新型技术方案针对现有技术解决方案过于单一的技术问题,提供了显著不同于现有技术的解决方案,具体地本实用新型主要提供了一种用于机器人的行走机构,用以解决上述背景技术中提出的目前现有的直立行走的机器人,遇到复杂路面,很难保持平衡的技术问题。
2、本实用新型解决上述技术问题采用的技术方案为:
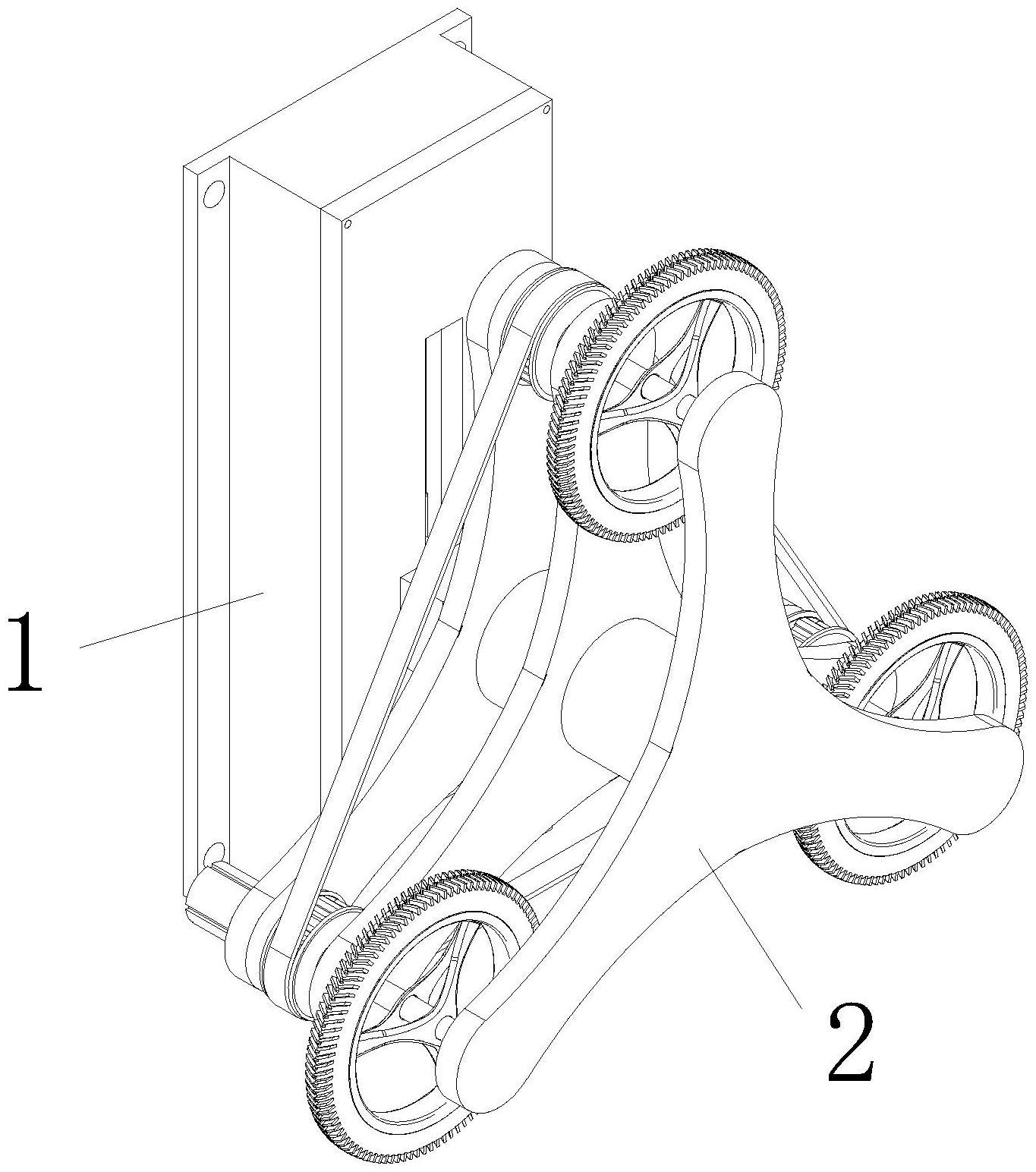
3、一种用于机器人的行走机构,包括升降装置,所述升降装置包括壳体,所述壳体内设置有第一电机,所述第一电机的输出端设置有丝杆和丝杆上的螺母座,所述螺母座上设置有移动块,且移动块连接有辅助行走装置,所述辅助行走装置包括中间轴和中间轴上的三个异形转动架,其中两个相邻的异形转动架之间设置有三个驱动轴,每个所述驱动轴上均设置有车轮。
4、进一步的,另外两个相邻的所述异形转动架之间设置有三个传动轴,每个所述传动轴上均设置有皮带轮,且三个皮带轮之间通过皮带连接,三个所述传动轴与对应的驱动轴连接。
5、进一步的,其中一个所述传动轴一端设置有第三电机,所述第三电机通过螺栓安装在异形转动架靠近壳体的一侧。
6、进一步的,所述移动块上的凹槽内设置有第二电机,所述第二电机的输出端与最接近的异形转动架的中间位置连接。
7、进一步的,所述壳体内设置有分隔板,且所述壳体的开口位置通过螺栓连接有盖体。
8、进一步的,所述丝杆一端设置有承座,所述承座通过螺栓安装在壳体内。
9、与现有技术相比,本实用新型的有益效果为:
10、本实用新型通过设置的壳体、第一电机、螺母座、移动块、第三电机、承座、中间轴、异形转动架、传动轴、皮带轮和驱动轴,实现了在机器人行走的过程中,遇到凹凸不平的路面时,可以使得安装在人形机器人两个小腿位置的两个辅助行走装置中的四个车轮着地,提高平衡能力,有效的避免了机器人因失去平衡而意外摔倒的情况发生,且在遇到楼梯的时候,第二电机启动,通过异形转动架的转动,跨越台阶,有效的辅助机器人保持平衡,提高上下台阶的稳定性,并且结构简单,方便安装,可直接安装在机器人的小腿位置,具有一定的实用价值。
11、以下将结合附图与具体的实施例对本实用新型进行详细的解释说明。
技术特征:
1.一种用于机器人的行走机构,包括升降装置(1),所述升降装置(1)包括壳体(11),所述壳体(11)内设置有第一电机(12),所述第一电机(12)的输出端设置有丝杆(13)和丝杆(13)上的螺母座(14),所述螺母座(14)上设置有移动块(15),且移动块(15)连接有辅助行走装置(2),其特征在于,所述辅助行走装置(2)包括中间轴(21)和中间轴(21)上的三个异形转动架(22),其中两个相邻的异形转动架(22)之间设置有三个驱动轴(25),每个所述驱动轴(25)上均设置有车轮(26)。
2.根据权利要求1所述的一种用于机器人的行走机构,其特征在于,另外两个相邻的所述异形转动架(22)之间设置有三个传动轴(23),每个所述传动轴(23)上均设置有皮带轮(24),且三个皮带轮(24)之间通过皮带连接,三个所述传动轴(23)与对应的驱动轴(25)连接。
3.根据权利要求2所述的一种用于机器人的行走机构,其特征在于,其中一个所述传动轴(23)一端设置有第三电机(27),所述第三电机(27)通过螺栓安装在异形转动架(22)靠近壳体(11)的一侧。
4.根据权利要求1所述的一种用于机器人的行走机构,其特征在于,所述移动块(15)上的凹槽内设置有第二电机(16),所述第二电机(16)的输出端与最接近的异形转动架(22)的中间位置连接。
5.根据权利要求3所述的一种用于机器人的行走机构,其特征在于,所述壳体(11)内设置有分隔板(111),且所述壳体(11)的开口位置通过螺栓连接有盖体(18)。
6.根据权利要求1所述的一种用于机器人的行走机构,其特征在于,所述丝杆(13)一端设置有承座(17),所述承座(17)通过螺栓安装在壳体(11)内。
技术总结
本技术提供了一种用于机器人的行走机构,属于人工智能机器人的技术领域,包括升降装置,所述升降装置包括壳体,所述壳体内设置有第一电机,所述第一电机的输出端设置有丝杆和丝杆上的螺母座,所述螺母座上设置有移动块,且移动块连接有辅助行走装置,所述辅助行走装置包括中间轴和中间轴上的三个异形转动架,其中两个相邻的异形转动架之间设置有三个驱动轴,每个所述驱动轴上均设置有车轮,通过本技术,实现了在机器人行走的过程中,遇到凹凸不平的路面或者楼梯的时候,辅助机器人保持平衡移动,有效的避免了机器人因失去平衡而意外摔倒的情况发生。
技术研发人员:蔡一帆
受保护的技术使用者:陕西小北智能科技有限公司
技术研发日:20230505
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!