机械手和机器人的制作方法
本申请属于机械手,尤其涉及一种机械手和机器人。
背景技术:
1、在汽车装配线上,一般均是采用机械手完成对汽车座椅的搬运工作,现有的搬运机械手一般是两点支撑结构的机械手,机械手包括的插齿和托板,插齿插设于座椅的靠背和坐垫之间,托板与座椅的靠背抵接,通过插齿和托板两点支撑座椅完成搬运。但是该机械手在搬运座椅过程中,插齿和托板很难夹紧座椅导致座椅有从机械手脱落的风险。
技术实现思路
1、本申请实施例提供一种机械手和机器人,能够防止在搬运过程中座椅从机械手脱落。
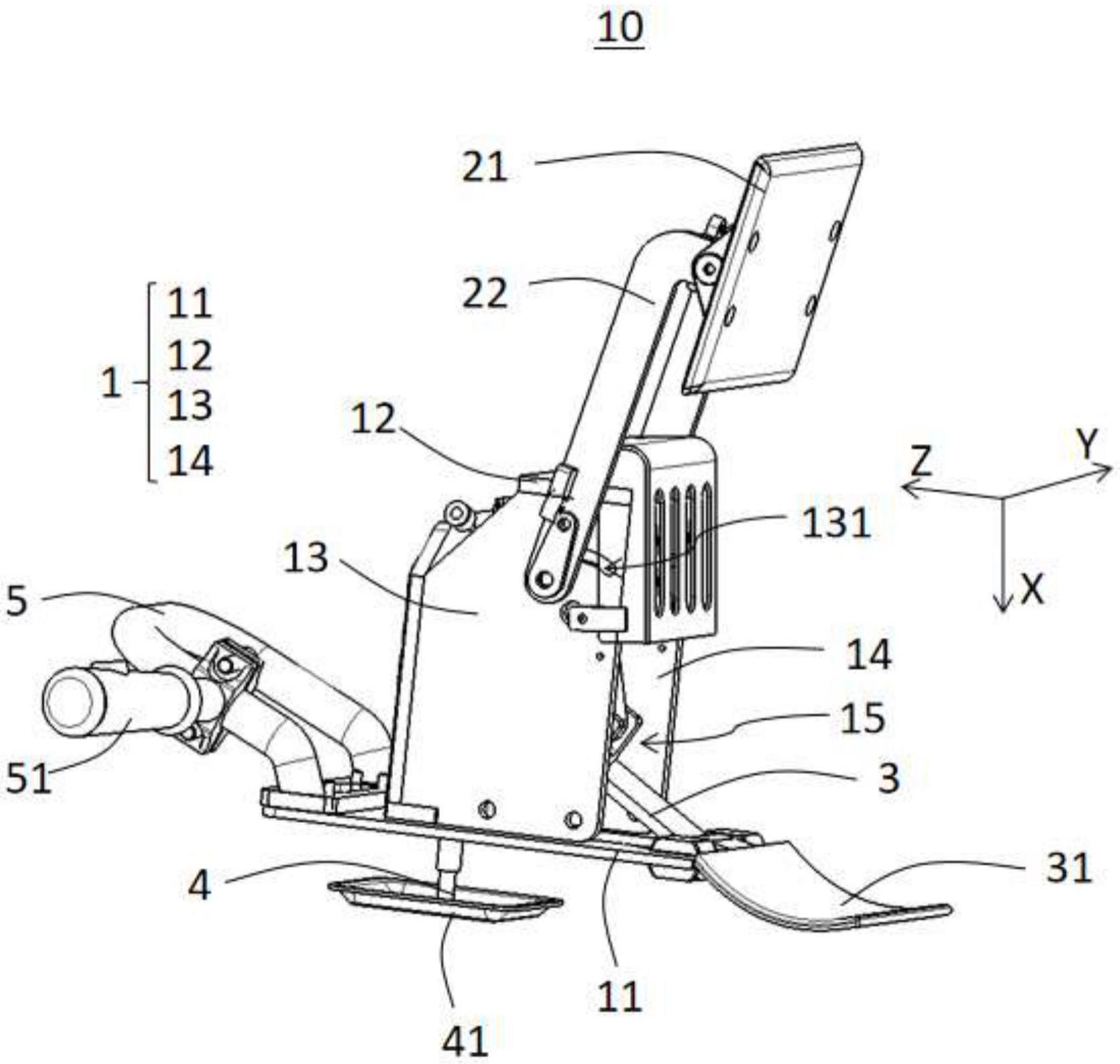
2、本申请第一方面实施例提供一种机械手,用于抓取汽车座椅,包括本体、第一夹紧组件、第二夹紧组件和第三夹紧组件。第一夹紧组件与本体连接,第一夹紧组件包括第一托板,第一托板与汽车座椅的靠背抵接;第二夹紧组件与本体连接,第二夹紧组件位于第一夹紧组件在第一方向的一侧,第二夹紧组件包括第二托板,第二托板插入汽车座椅的坐垫和靠背之间;第三夹紧组件与本体连接,第三夹紧组件位于第二夹紧组件背离第一夹紧组件的一侧,第三夹紧组件包括支撑板,支撑板与汽车座椅的坐垫抵接,其中,第一托板、第二托板和支撑板中至少一者能够相对本体活动,以夹紧或者释放汽车座椅。
3、根据本申请第一方面的实施方式,第二夹紧组件还包括驱动组件,驱动组件驱动第二托板旋转。
4、根据本申请第一方面前述任一实施方式,驱动组件包括驱动件、输出轴和压板,驱动件与本体连接,压板的一端与输出轴转动连接,另一端与第二托板固定连接。
5、根据本申请第一方面前述任一实施方式,驱动组件还包括第一转轴和设于本体的第二转轴,压板通过第一转轴与输出轴转动连接,压板通过第二转轴与第二托板连接。
6、根据本申请第一方面前述任一实施方式,本体包括安装底板,安装底板包括间隔设置的两个安装座,第二转轴连接于两个安装座之间。
7、根据本申请第一方面前述任一实施方式,本体还包括与安装底板沿第一方向间隔设置的顶板,驱动件与顶板连接。
8、根据本申请第一方面前述任一实施方式,本体还包括沿第二方向间隔设置的第一侧板和第二侧板,第一侧板、顶板、第二侧板和安装底板依次连接并合围形成收容腔,第一方向和第二方向相交,
9、第一夹紧组件设于第一侧板和/或第二侧板,或者第一夹紧组件设于顶板,驱动组件至少部分收容于收容腔。
10、根据本申请第一方面前述任一实施方式,第一夹紧组件还包括调节支撑臂,调节支撑臂一端与第一托板连接,另一端与第一侧板和/或第二侧板连接,或者另一端与顶板连接。
11、根据本申请第一方面前述任一实施方式,调节支撑臂的数量为2个,2个调节支撑臂背离第一托板的一端分别与第一侧板和第二侧板连接;第一侧板和第二侧板上均开设有限位槽,调节支撑臂包括限位块,限位块至少部分置于限位槽。
12、根据本申请第一方面前述任一实施方式,机械手还包括设于本体的把手,把手和第二托板分设于本体沿第三方向的两侧,把手上设置有控制模块。
13、根据本申请第一方面前述任一实施方式,第二托板为弧形板,第二托板朝背离第一夹紧组件的方向凹陷形成。
14、根据本申请第一方面前述任一实施方式,第三夹紧组件还包括伸缩组件,伸缩组件一端与支撑板连接,另一端与本体连接。
15、本申请第二方面实施例提供了一种机器人,用于搬运汽车座椅,机器人包括机械臂和前述第一方面实施例中任一项的机械手,机械臂与机械手的本体连接。
16、本申请实施例的机械手,包括本体、第一夹紧组件、第二夹紧组件和第三夹紧组件,第一夹紧组件、第二夹紧组件和第三夹紧组件均与本体连接,第一夹紧组件包括用于与汽车座椅的靠背抵接的第一托板,第二夹紧组件包括用于插入汽车座椅的坐垫和靠背之间的第二托板,第三夹紧组件包括用于与汽车座椅的坐垫抵接的支撑板,其中,第一托板、第二托板和支撑板中至少一者能够相对本体活动,以夹紧或者释放汽车座椅。本申请实施例的机械手在搬运汽车座椅过程中,第一托板与汽车座椅的靠背抵接,第二托板插入汽车座椅的坐垫和靠背之间,支撑板与汽车座椅的坐垫抵接,座椅三处受力,使得机械手对座椅的抓取更稳定,防止在搬运过程中座椅从机械手脱落。
技术特征:
1.一种机械手,其特征在于,包括:
2.根据权利要求1所述的机械手,其特征在于,所述第二夹紧组件还包括驱动组件,所述驱动组件驱动所述第二托板旋转。
3.根据权利要求2所述的机械手,其特征在于,所述驱动组件包括驱动件、输出轴和压板,所述驱动件与所述本体连接,所述压板的一端与所述输出轴转动连接,另一端与所述第二托板固定连接。
4.根据权利要求3所述的机械手,其特征在于,所述驱动组件还包括第一转轴和设于所述本体的第二转轴,所述压板通过所述第一转轴与所述输出轴转动连接,所述压板通过所述第二转轴与所述第二托板连接。
5.根据权利要求4所述的机械手,其特征在于,所述本体包括安装底板,所述安装底板包括间隔设置的两个安装座,所述第二转轴连接于两个所述安装座之间。
6.根据权利要求5所述的机械手,其特征在于,所述本体还包括与所述安装底板沿所述第一方向间隔设置的顶板,所述驱动件与所述顶板连接。
7.根据权利要求6所述的机械手,其特征在于,所述本体还包括沿第二方向间隔设置的第一侧板和第二侧板,所述第一侧板、所述顶板、所述第二侧板和所述安装底板依次连接并合围形成收容腔,所述第一方向和所述第二方向相交,
8.根据权利要求7所述的机械手,其特征在于,所述第一夹紧组件还包括调节支撑臂,所述调节支撑臂一端与所述第一托板连接,另一端与所述第一侧板和/或所述第二侧板连接,或者另一端与所述顶板连接。
9.根据权利要求8所述的机械手,其特征在于,所述调节支撑臂的数量为2个,2个所述调节支撑臂背离所述第一托板的一端分别与所述第一侧板和所述第二侧板连接;
10.根据权利要求1所述的机械手,其特征在于,所述机械手还包括设于所述本体的把手,所述把手和所述第二托板分设于所述本体沿第三方向的两侧,所述把手上设置有控制模块。
11.根据权利要求1所述的机械手,其特征在于,所述第二托板为弧形板,所述第二托板朝背离所述第一夹紧组件的方向凹陷形成。
12.根据权利要求1所述的机械手,其特征在于,所述第三夹紧组件还包括伸缩组件,所述伸缩组件一端与所述支撑板连接,另一端与本体连接。
13.一种机器人,用于搬运汽车座椅,其特征在于,包括:
技术总结
本申请公开了一种机械手和机器人,机械手包括本体、第一夹紧组件、第二夹紧组件和第三夹紧组件。第一夹紧组件与本体连接,第一夹紧组件包括第一托板,第一托板与汽车座椅的靠背抵接;第二夹紧组件与本体连接,第二夹紧组件位于第一夹紧组件在第一方向的一侧,第二夹紧组件包括第二托板,第二托板插入汽车座椅的坐垫和靠背之间;第三夹紧组件与本体连接,第三夹紧组件位于第二夹紧组件背离第一夹紧组件的一侧,第三夹紧组件包括支撑板,支撑板与汽车座椅的坐垫抵接,其中,第一托板、第二托板和支撑板中至少一者能够相对本体活动,以夹紧或者释放汽车座椅。根据本申请的机械手和机器人,能够防止在搬运过程中座椅从机械手脱落。
技术研发人员:谢品
受保护的技术使用者:北京车和家汽车科技有限公司
技术研发日:20230508
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!