一种机器人夹爪的制作方法
本技术涉及工件加工,特别是涉及一种机器人夹爪。
背景技术:
1、为了提升生产效率、降低减少人工操作,机器人被引用并应用于各种工件的加工操作中。具体而言,机器人具有若干个夹爪,其可利用这些夹爪夹持工件并完成对工件的固定及搬运等操作。
2、实际生产过程中机器人的夹爪会在与工件的反复接触过程中发生磨损,磨损到达一定程度时就会因无法夹紧工件而报废,受限于工件的夹持需求现机器人夹爪易受磨损使用寿命低,生产过程中需要多次更换不利于控制生产成本,且机器人夹爪磨损后需要整体更换,进一步导致生产效率降低,用户的使用体验差。
技术实现思路
1、为解决上述技术问题,本实用新型的目的是提供一种机器人夹爪,其将易磨损的部位形成独立的垫块结构,显著降低了机器人夹爪的装配难度,同时对垫块的厚度作出调整使其更加耐磨,进一步提升了机器人夹爪的使用寿命,其的结构简单可靠、能够显著提升用户的使用体验。
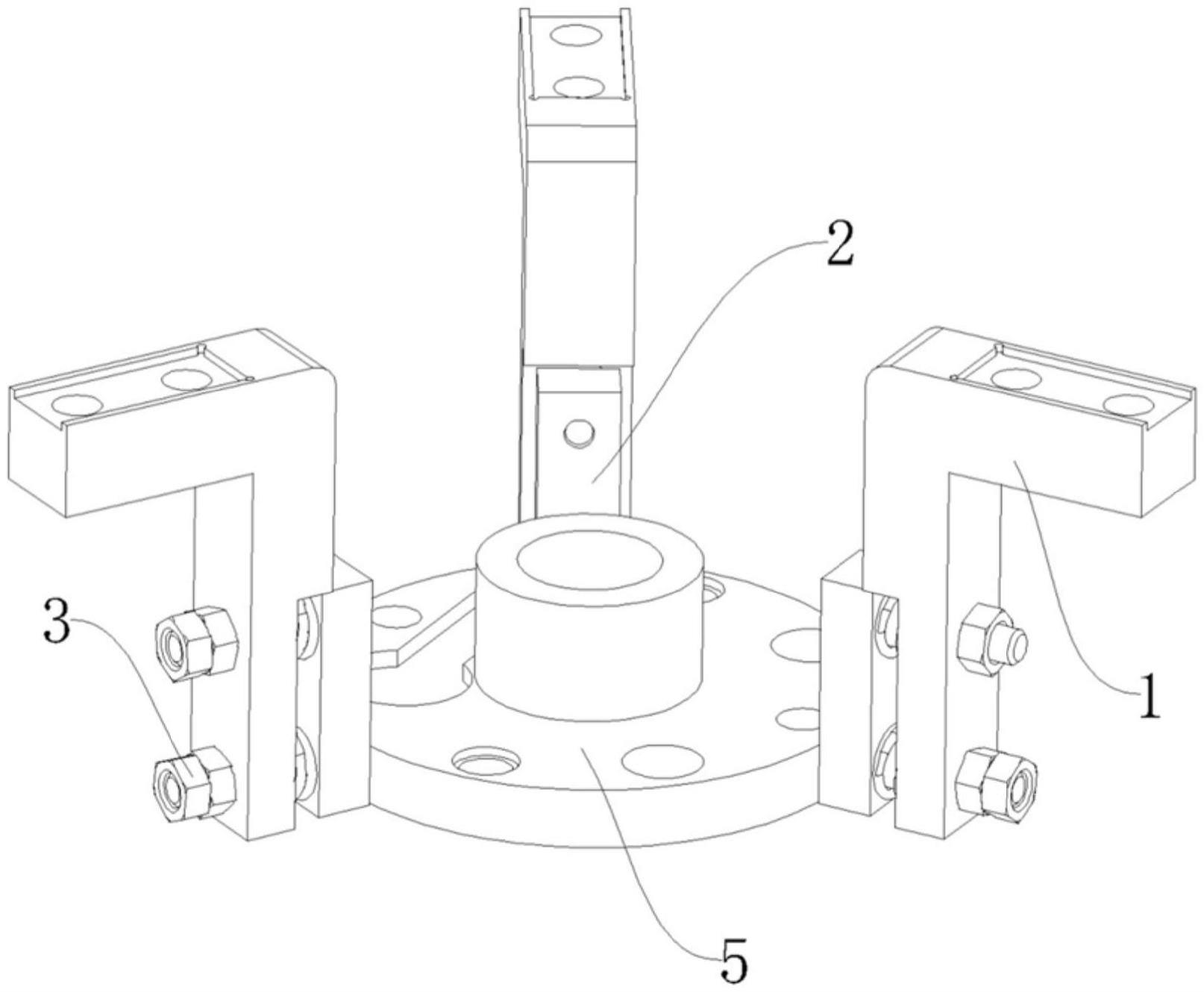
2、基于此,本实用新型提供了一种机器人夹爪,其包括:
3、夹爪本体,所述夹爪本体上开设有第一连接孔;
4、垫块,设于所述夹爪本体上并与所述夹爪本体相连接,所述垫块上设有与所述第一连接孔相匹配的第二连接孔;
5、导向件,所述导向件穿设于所述第一连接孔和所述第二连接孔中并用于固定所述垫块与所述夹爪本体;
6、其中,所述垫块的厚度不小于8mm。
7、本申请的一些实施例中,所述夹爪本体开设有装配槽,所述垫块设于所述装配槽中。
8、本申请的一些实施例中,所述导向件包括连接螺杆和套设于所述连接螺杆上的紧固螺母,所述连接螺杆穿设于所述第一连接孔和所述第二连接孔中,所述紧固螺母设于所述夹爪本体远离所述垫块的一侧并抵靠所述夹爪本体。
9、本申请的一些实施例中,所述连接螺杆的中部向外凸起形成限位部,所述限位部穿设于所述第一连接孔中并抵靠所述垫块。
10、本申请的一些实施例中,所述导向件设有多个,多个所述导向件沿所述垫块的长度方向依次设置,所述第一连接孔和所述第二连接孔的数量与所述导向件的数量相同并与所述导向件一一对应。
11、本申请的一些实施例中,所述垫块与所述夹爪本体之间设有弹簧,所述弹簧的两端分别抵靠所述垫块与所述夹爪本体。
12、本申请的一些实施例中,所述弹簧套设于所述限位部上。
13、本申请的一些实施例中,所述弹簧的伸缩量不小于0.5mm。
14、本申请的一些实施例中,所述装配槽的底面厚度不大于6mm。
15、本实用新型实施例提供了一种机器人夹爪,其与现有技术相比,其有益效果在于:
16、本实用新型实施例提供了一种机器人夹爪,其包括夹爪本体、垫块和导向件,夹爪本体呈l形设置,l形夹爪本体的一条夹臂上开设有第一连接孔,垫块紧贴夹爪本体设有第一连接孔的夹臂设置,垫块上设有与第一连接孔相匹配的第二连接孔,导向件则穿设于第一连接孔和第二连接孔中并将夹爪本体和垫块连接为一体,同时为了进一步提升垫块的使用寿命,本申请的垫块厚度不小于8mm。基于上述结构,垫块通过导向件固定连接在夹爪本体上,使用时将垫块抵靠工件并利用垫块代替夹爪本体接触工件以完成对工件的夹持。显然垫块的设置避免了夹爪本体与工件的直接接触,使得夹爪本体不再出现磨损;进一步的,由于垫块代替夹爪本体接触工件并随着与工件的不断摩擦而出现磨损,当垫块的磨损到达一定程度时只需要更换垫块即可再次实现对工件的有效夹持,保证机器人夹爪的使用效果;另外,为了增加垫块的使用寿命,降低垫块的更换次数,本申请中的垫块厚度不小于8mm。如此该机器人夹爪改善了自身结构设计,降低了磨损对机器人夹爪夹持操作的影响,其的结构设计巧妙并易于操作,用户的使用体验好。
技术特征:
1.一种机器人夹爪,其特征在于,包括:
2.根据权利要求1所述的机器人夹爪,其特征在于,所述夹爪本体开设有装配槽,所述垫块设于所述装配槽中。
3.根据权利要求1所述的机器人夹爪,其特征在于,所述导向件包括连接螺杆和套设于所述连接螺杆上的紧固螺母,所述连接螺杆穿设于所述第一连接孔和所述第二连接孔中,所述紧固螺母设于所述夹爪本体远离所述垫块的一侧并抵靠所述夹爪本体。
4.根据权利要求3所述的机器人夹爪,其特征在于,所述连接螺杆的中部向外凸起形成限位部,所述限位部穿设于所述第一连接孔中并抵靠所述垫块。
5.根据权利要求4所述的机器人夹爪,其特征在于,所述导向件设有多个,多个所述导向件沿所述垫块的长度方向依次设置,所述第一连接孔和所述第二连接孔的数量与所述导向件的数量相同并与所述导向件一一对应。
6.根据权利要求4所述的机器人夹爪,其特征在于,所述垫块与所述夹爪本体之间设有弹簧,所述弹簧的两端分别抵靠所述垫块与所述夹爪本体。
7.根据权利要求6所述的机器人夹爪,其特征在于,所述弹簧套设于所述限位部上。
8.根据权利要求7所述的机器人夹爪,其特征在于,所述弹簧的伸缩量不小于0.5mm。
9.根据权利要求2所述的机器人夹爪,其特征在于,所述装配槽的底面厚度不大于6mm。
技术总结
本技术涉及工件加工技术领域,公开了一种机器人夹爪,其包括夹爪本体、垫块和导向件,夹爪本体呈L形设置,L形夹爪本体的一条夹臂上开设有第一连接孔,垫块紧贴夹爪本体设有第一连接孔的夹臂设置,垫块上设有与第一连接孔相匹配的第二连接孔,导向件则穿设于第一连接孔和第二连接孔中并将夹爪本体和垫块连接为一体;进一步的,垫块厚度不小于8mm。与现有技术相比,该机器人夹爪改善了自身结构设计,降低了磨损对机器人夹爪夹持操作的影响,其的结构设计巧妙并易于操作,用户的使用体验好。
技术研发人员:张明星,谭国林,李继安,邱万强
受保护的技术使用者:三菱电机(广州)压缩机有限公司
技术研发日:20230510
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!