一种机器人用防撞组件的制作方法
本技术涉及机器人,具体为一种机器人用防撞组件。
背景技术:
1、机器人是一种能够半自主或全自主工作的智能机器,机器人能够通过编程和自动控制来执行诸如作业或移动等任务,机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围;申请号cn201620933493.9公布了一种机器人,该装置主电路板响应每一机器人耳朵的输入操作控制机器人执行相应输出,是一种结构简单、集成程度高的机器人;但是现有的机器人,不便对碰撞机器人产生的冲击力进行缓冲处理,同时不便在机器人不使用时,无法对机器人进行遮挡,不便对机器人进行保护,影响使用。
2、因此,我们提出了一种机器人用防撞组件。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本实用新型提供了一种机器人用防撞组件,解决了现有的机器人,不便对碰撞机器人产生的冲击力进行缓冲处理,同时不便在机器人不使用时,无法对机器人进行遮挡,不便对机器人进行保护,影响使用。
3、(二)技术方案
4、为实现以上目的,本实用新型通过以下技术方案予以实现:一种机器人用防撞组件,包括机器人主体,所述机器人主体外侧螺丝固定有连接固定板的阻尼伸缩杆,所述阻尼伸缩杆外侧套接有降低缓冲力的缓冲弹簧,所述机器人主体外部螺丝固定有连接缓冲板的泡沫块a,所述缓冲板一侧螺丝固定有连接固定板的泡沫块b,所述固定板内侧螺丝固定有进行缓冲的阻尼弹簧b,所述固定板内侧螺丝固定有进行缓冲的阻尼弹簧a;
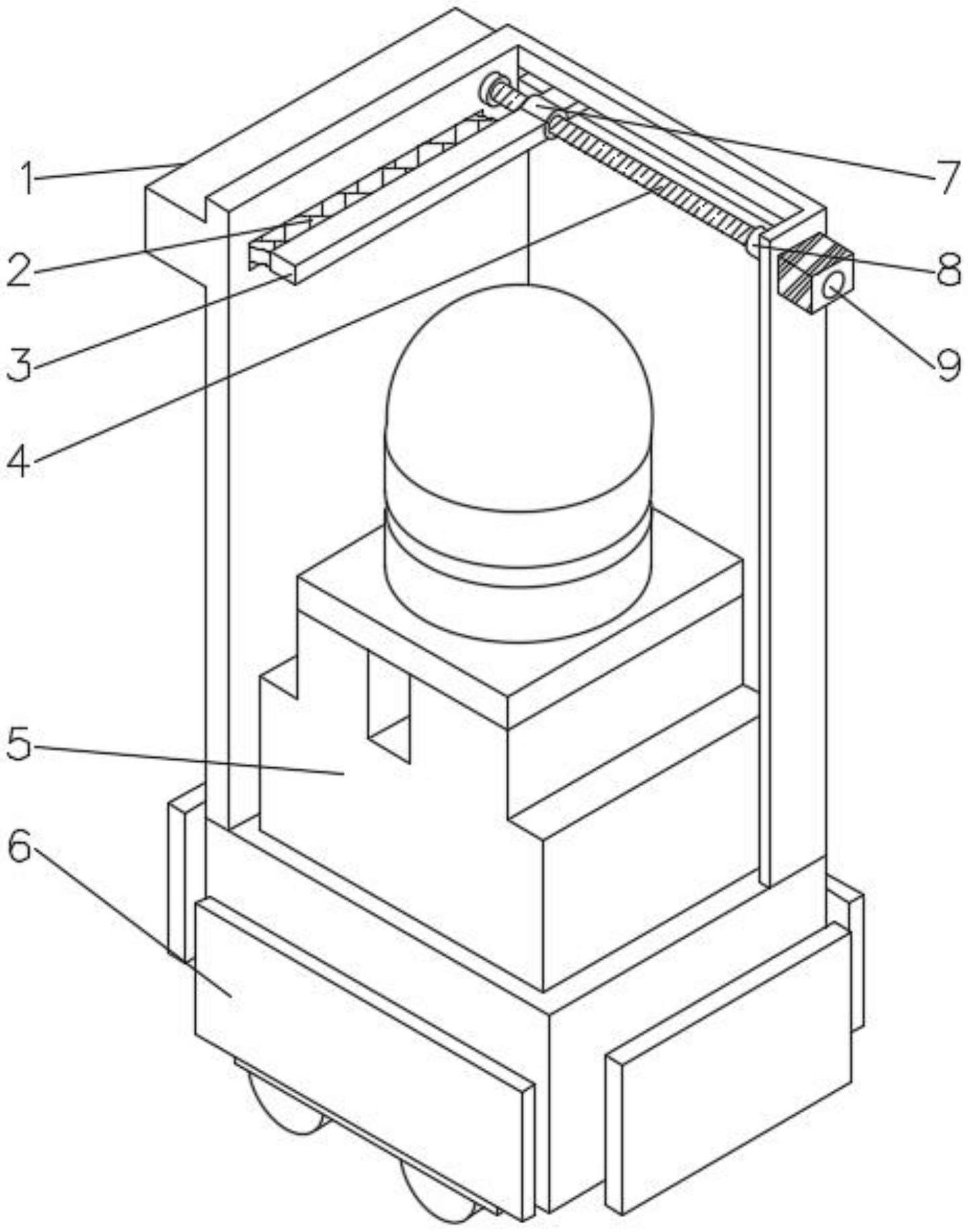
5、优选的,所述机器人主体一侧螺丝连接有固定伺服电机的竖架,所述伺服电机一侧螺丝固定有带动丝杆进行转动的传动轴,所述丝杆外侧螺纹连接有带动固定杆进行移动的螺套,所述固定杆一侧螺丝固定有对机器人主体进行保护的帆布;
6、优选的,所述帆布远离固定杆的一端缠绕有卷杆外侧,所述竖架内部螺丝固定有带动驱动轴进行转动的驱动电机;
7、优选的,所述驱动轴内侧过盈连接有带动帆布收卷的卷杆;
8、优选的,所述驱动电机的动力输出端与驱动轴的动力输入端相连,所述伺服电机的动力输出端与传动轴的动力输入端相连;
9、优选的,所述驱动电机和伺服电机的输入端与外部电源的输出端电性连接。
10、(三)有益效果
11、本实用新型提供了一种机器人用防撞组件。具备以下有益效果:
12、1、该机器人用防撞组件,当机器人主体受到碰撞时,固定板带动阻尼伸缩杆进行收缩,然后阻尼伸缩杆外的缓冲弹簧进行压缩,将碰撞产生的冲击力进行缓冲,然后固定板内的泡沫块b和阻尼弹簧b进行压动缓冲板,使冲击力进行减弱,随后缓冲板内的泡沫块a和阻尼弹簧a进行压缩,再次将冲击力进行缓冲减弱,从而便于对机器人主体进行保护。
13、2、该机器人用防撞组件,当机器人主体不工作时,竖架内的驱动电机将收到的电能转化为机械能,然后驱动轴带动卷杆外的帆布进行放卷,同时竖架外的伺服电机将收到的电能转换为机械能,传动轴带动丝杆进行转动,随后丝杆外的螺套带动固定杆进行移动,然后固定杆带动帆布展开在机器人主体上方,避免异物与机器人主体接触。
技术特征:
1.一种机器人用防撞组件,其特征在于:包括机器人主体(5),所述机器人主体(5)外侧螺丝固定有连接固定板(6)的阻尼伸缩杆(15),所述阻尼伸缩杆(15)外侧套接有降低缓冲力的缓冲弹簧(16),所述机器人主体(5)外部螺丝固定有连接缓冲板(18)的泡沫块a(13),所述缓冲板(18)一侧螺丝固定有连接固定板(6)的泡沫块b(14),所述固定板(6)内侧螺丝固定有进行缓冲的阻尼弹簧b(19),所述固定板(6)内侧螺丝固定有进行缓冲的阻尼弹簧a(17)。
2.根据权利要求1所述的一种机器人用防撞组件,其特征在于:所述机器人主体(5)一侧螺丝连接有固定伺服电机(9)的竖架(1),所述伺服电机(9)一侧螺丝固定有带动丝杆(4)进行转动的传动轴(8),所述丝杆(4)外侧螺纹连接有带动固定杆(3)进行移动的螺套(7),所述固定杆(3)一侧螺丝固定有对机器人主体(5)进行保护的帆布(2)。
3.根据权利要求2所述的一种机器人用防撞组件,其特征在于:所述帆布(2)远离固定杆(3)的一端缠绕有卷杆(10)外侧,所述竖架(1)内部螺丝固定有带动驱动轴(11)进行转动的驱动电机(12)。
4.根据权利要求3所述的一种机器人用防撞组件,其特征在于:所述驱动轴(11)内侧过盈连接有带动帆布(2)收卷的卷杆(10)。
5.根据权利要求3所述的一种机器人用防撞组件,其特征在于:所述驱动电机(12)的动力输出端与驱动轴(11)的动力输入端相连,所述伺服电机(9)的动力输出端与传动轴(8)的动力输入端相连。
6.根据权利要求3所述的一种机器人用防撞组件,其特征在于:所述驱动电机(12)和伺服电机(9)的输入端与外部电源的输出端电性连接。
技术总结
本技术公开了一种机器人用防撞组件,包括机器人主体,所述机器人主体外侧螺丝固定有连接固定板的阻尼伸缩杆,所述阻尼伸缩杆外侧套接有降低缓冲力的缓冲弹簧,所述机器人主体外部螺丝固定有连接缓冲板的泡沫块A,所述缓冲板一侧螺丝固定有连接固定板的泡沫块B,所述固定板内侧螺丝固定有进行缓冲的阻尼弹簧B,所述固定板内侧螺丝固定有进行缓冲的阻尼弹簧A;该装置解决了现有的机器人,不便对碰撞机器人产生的冲击力进行缓冲处理,同时不便在机器人不使用时,无法对机器人进行遮挡,不便对机器人进行保护,影响使用。
技术研发人员:贾文灿,王龙刚,侯洪涛
受保护的技术使用者:河南清祥人工智能研究院有限公司
技术研发日:20230511
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!