一种自动变距取放料机械手的制作方法
本技术应用于自动化生产设备的,特别涉及一种自动变距取放料机械手。
背景技术:
1、随着手机、平板电脑的不断发展,提高生产效率和降低生产成本成为3c行业的热门话题。为了提高效率,设计人员常常采用多个取放组件进行同时工作,但是吸塑盘上两个产品的相对位置与两个工作穴位的相对位置往往不同,导致设备工作的时候工作位及上下料不匹配。为了满足通用性要求,现有工厂作业过程通过人工或机械手单取一个产品放到工作穴位中加工,显然工作效率低下、人力成本高,同时人工操作手法不够规范,返工率较高。
2、如公开号为cn109704052a的中国专利公开了取放料变距机构和取放料变距装置,其通过改变两两用来取料的取放料单元和两两用来放料的取放料单元之间的距离,以满足不同双穴测试治具的需求,节省测试时间,提高测试效率。然而其容易出现变距的距离不一,难以保证同步变距,同时其取放料单元的数量有限,因此有必要提供一种结构紧凑、兼容多个取放料组件、满足不同来料和放料间距要求的自动变距取放料机械手。
技术实现思路
1、本实用新型所要解决的技术问题是克服现有技术的不足,提供了一种结构紧凑、兼容多个取放料组件、满足不同来料和放料间距要求的自动变距取放料机械手。
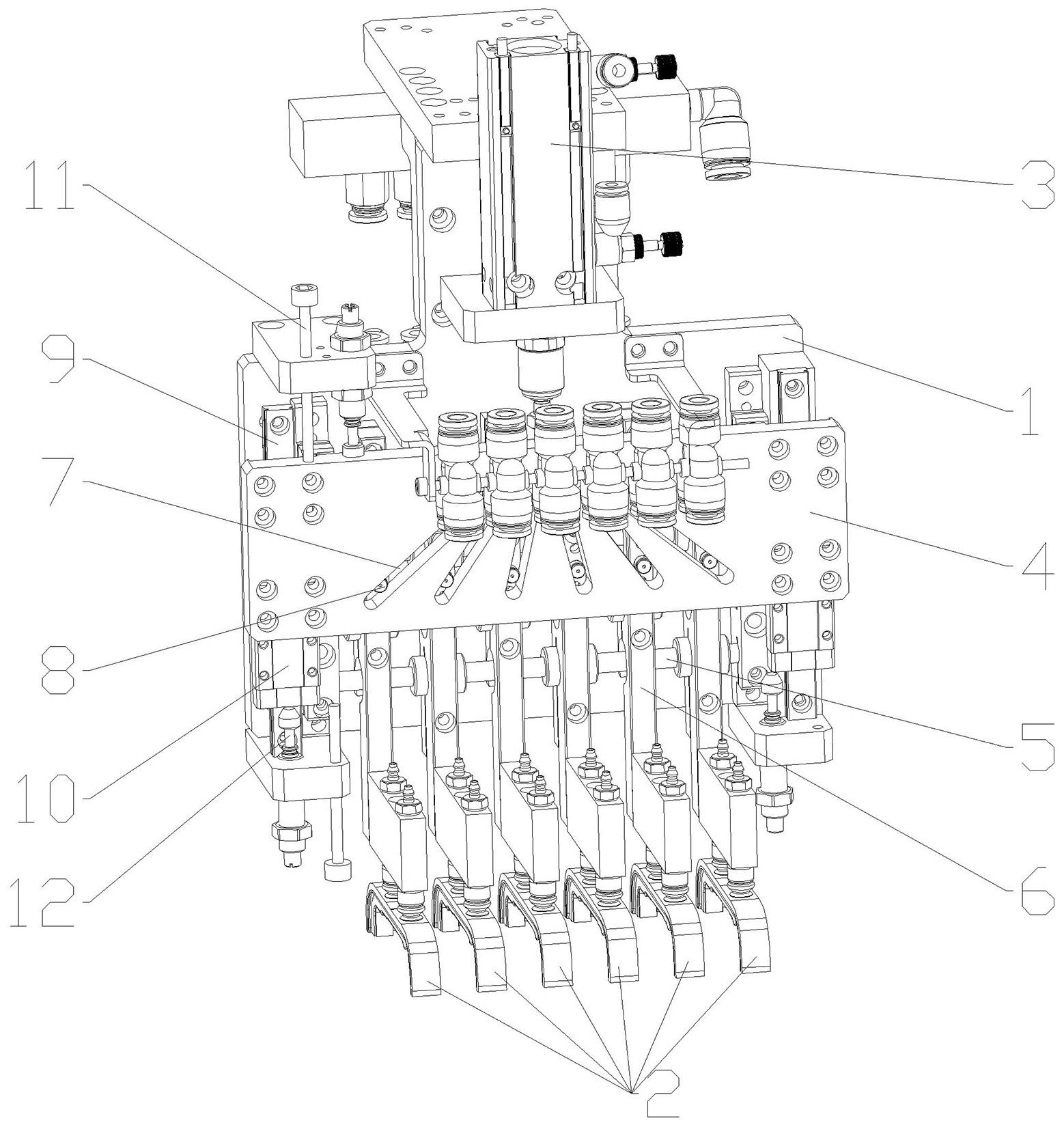
2、本实用新型所采用的技术方案是:本实用新型包括安装板和若干组真空吸盘,所述安装板设置有沿竖直方向驱动的第一驱动气缸,所述第一驱动气缸的动作端设置有滑动板,所述滑动板滑动设置在所述安装板上,所述安装板设置有若干组平行且横向设置的导向杆,所述导向杆设置有若干沿横向滑动的所述安装条,所述滑动板开设有若干呈扇形分布的腰形孔,所述安装条设置有凸轮随动器,所述凸轮随动器滚动设置在所述腰形孔内,若干组所述真空吸盘对应与每组所述安装条连接。
3、由上述方案可见,所述真空吸盘的组数为六组,所述真空吸盘用于吸取和放置物料,所述第一驱动气缸驱动所述滑动板沿竖直方向移动,由于所述凸轮随动器滚动设置在所述腰形孔,所述滑动板的竖直方向移动,带动所述凸轮随动器沿倾斜设置的所述腰形孔进行移动,进而带动若干所述安装条同步沿横向方向移动,实现相邻两个所述真空吸盘的开合。所述自动变距取放料机械手的结构较为紧凑、轻巧、简单,维护保养操作方便,六组所述真空吸盘同时工作,大大提升了取放料环节的运行效率,根据相邻两个工作穴位的间距去调整取料组件上的间距,满足工作穴位间距不同的情况,大大提升了取放料环节的运行效率和兼容性。
4、一个优选方案是,所述安装板设置有沿竖直方向设置的直线导轨,所述直线导轨滑动设置有滑块,所述安装板与所述滑块连接。
5、一个优选方案是,所述安装板的顶部和底部均设置有沿竖直方向设置的调整螺丝,所述调整螺丝与所述滑动板限位配合。
6、一个优选方案是,所述安装板的顶部和底部均设置有沿竖直方向设置的液压缓冲器,所述液压缓冲器与所述滑动板限位配合。
7、一个优选方案是,若干所述腰形孔以所述第一驱动气缸的动作端为圆心呈扇形分布。
8、一个优选方案是,所述自动变距取放料机械手还包括支撑架,所述支撑架设置有横向设置的直线模组,所述直线模组的动作端设置有沿竖直方向驱动的第二驱动气缸,所述第二驱动气缸的动作端与所述安装板连接。
技术特征:
1.一种自动变距取放料机械手,包括安装板(1)和若干组真空吸盘(2),其特征在于:所述安装板(1)设置有沿竖直方向驱动的第一驱动气缸(3),所述第一驱动气缸(3)的动作端设置有滑动板(4),所述滑动板(4)滑动设置在所述安装板(1)上,所述安装板(1)设置有若干组平行且横向设置的导向杆(5),所述导向杆(5)设置有若干沿横向滑动的安装条(6),所述滑动板(4)开设有若干呈扇形分布的腰形孔(7),所述安装条(6)设置有凸轮随动器(8),所述凸轮随动器(8)滚动设置在所述腰形孔(7)内,若干组所述真空吸盘(2)对应与每组所述安装条(6)连接。
2.根据权利要求1所述的自动变距取放料机械手,其特征在于:所述安装板(1)设置有沿竖直方向设置的直线导轨(9),所述直线导轨(9)滑动设置有滑块(10),所述安装板(1)与所述滑块(10)连接。
3.根据权利要求1所述的自动变距取放料机械手,其特征在于:所述安装板(1)的顶部和底部均设置有沿竖直方向设置的调整螺丝(11),所述调整螺丝(11)与所述滑动板(4)限位配合。
4.根据权利要求1所述的自动变距取放料机械手,其特征在于:所述安装板(1)的顶部和底部均设置有沿竖直方向设置的液压缓冲器(12),所述液压缓冲器(12)与所述滑动板(4)限位配合。
5.根据权利要求1所述的自动变距取放料机械手,其特征在于:若干所述腰形孔(7)以所述第一驱动气缸(3)的动作端为圆心呈扇形分布。
6.根据权利要求1所述的自动变距取放料机械手,其特征在于:所述自动变距取放料机械手还包括支撑架(13),所述支撑架(13)设置有横向设置的直线模组(14),所述直线模组(14)的动作端设置有沿竖直方向驱动的第二驱动气缸(15),所述第二驱动气缸(15)的动作端与所述安装板(1)连接。
技术总结
本技术旨在提供一种结构紧凑、兼容多个取放料组件、满足不同来料和放料间距要求的自动变距取放料机械手。本技术包括安装板和若干组真空吸盘,其特征在于:所述安装板设置有沿竖直方向驱动的第一驱动气缸,所述第一驱动气缸的动作端设置有滑动板,所述滑动板滑动设置在所述安装板上,所述安装板设置有若干组平行且横向设置的导向杆,所述导向杆设置有若干沿横向滑动的所述安装条,所述滑动板开设有若干呈扇形分布的腰形孔,所述安装条设置有凸轮随动器,所述凸轮随动器滚动设置在所述腰形孔内,若干组所述真空吸盘对应与每组所述安装条连接。本技术应用于自动化生产设备的技术领域。
技术研发人员:陈家民,冉璐珲,罗婷,胡仁有
受保护的技术使用者:珠海市运泰利自动化设备有限公司
技术研发日:20230512
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!