一种四足仿生机械狗
本技术涉及机器人,尤其是涉及一种四足仿生机械狗。
背景技术:
1、根据机械结构形式的不同,可以将常见的四足机器人腿部构型分为关节型、连杆型、缩放型等。关节型腿部结构直接仿照动物髋关节、膝关节、踝关节等骨骼形式,从外形上看,该类型腿部结构非常接近于动物的四肢,因此目前电驱动四足机械狗腿部构型大多采用关节型腿部结构。然而现有的关节型腿部结构中,常常在膝关节处内置一个电机用以驱动小腿,导致腿部重量大,惯量大而影响机械狗整体的机动性。
技术实现思路
1、本实用新型的目的是针对现有技术存在的不足,提供一种减轻腿部重量,从而减小机械狗运动惯量,提高机械狗整体机动性的四足仿生机械狗。
2、为实现上述目的,本实用新型四足仿生机械狗采用的技术方案是:
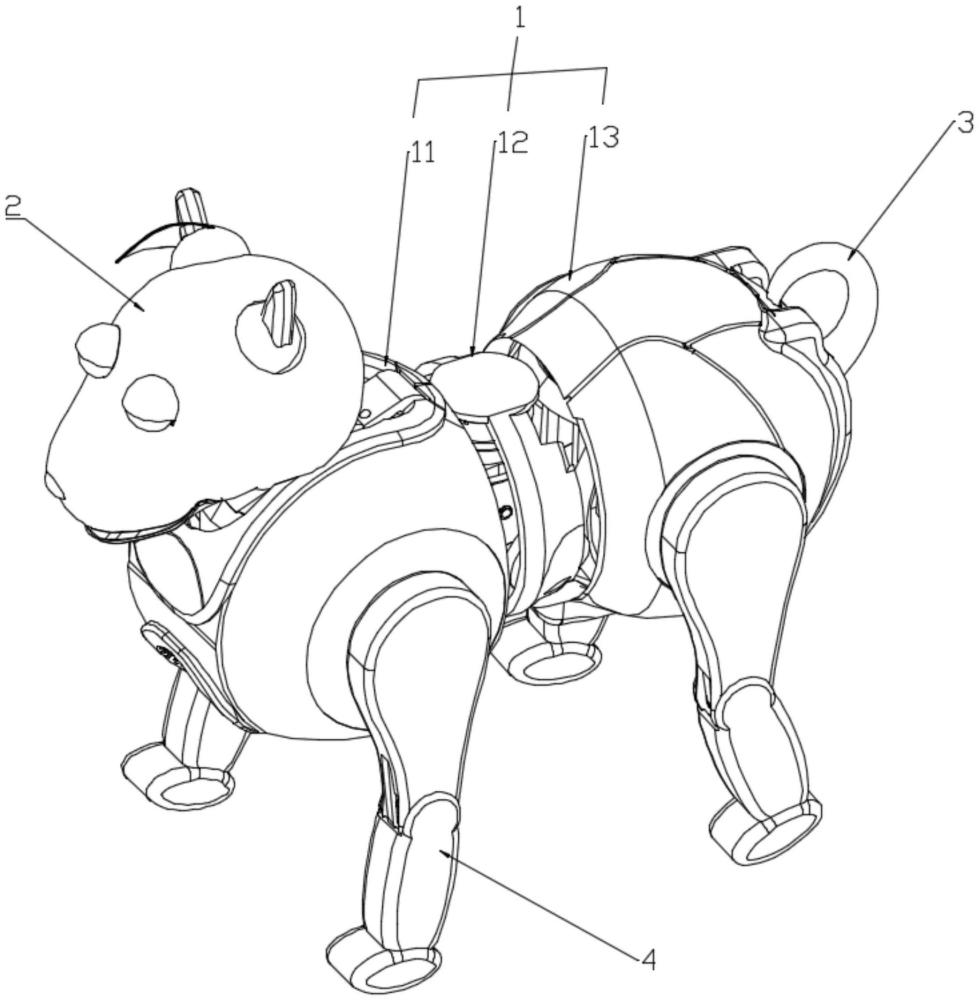
3、一种四足仿生机械狗,包括躯干,躯干的前后两侧设置有腿部机构,腿部机构包括同轴的大腿电机和小腿电机,大腿电机的输出端固接有大腿谐波减速器,大腿谐波减速器的输出端与躯干固接,小腿电机的输出端固接有小腿谐波减速器,小腿谐波减速器的输出端与大腿电机的壳体固接,小腿电机的壳体外侧套接有大腿骨,大腿骨的上侧收容有套接于小腿电机壳体外侧的主动轮,主动轮通过同步带连接有从动轮,从动轮固接于大腿骨的下侧,从动轮的侧壁固接有小腿骨,小腿骨的外侧套接有小腿外壳,小腿外壳的上侧通过转轴枢接有大腿外壳,大腿外壳套接于大腿骨的外侧,转轴贯穿于从动轮,小腿外壳的下侧设置有足部。
4、优选的,所述躯干包括前半身,前半身的后侧设置有扭腰电机,扭腰电机的壳体固接于前半身的后侧,扭腰电机的输出端固接有扭腰谐波减速器,扭腰谐波减速器的输出端固接有腰部,腰部内侧设置有弓腰电机,弓腰电机的输出端固接有弓腰谐波减速器,弓腰谐波减速器的输出端与腰部固接,弓腰电机的壳体固接有后半身。
5、优选的,所述前半身的前侧上部固接有扭头舵机,扭头舵机的输出端通过支架固接有点头舵机,点头舵机的输出轴固接有头部。
6、优选的,所述头部的上侧设置有眼球,头部内设置有驱使眼球转动的眼部舵机。
7、优选的,所述头部的下侧设置有下颚,头部内设置有驱使下颚张合的嘴部舵机。
8、优选的,所述后半身的后侧设置有尾巴,后半身内设置有驱使尾巴转动的尾部舵机。
9、本实用新型与现有技术相比,具有以下优点:
10、1、小腿电机、大腿电机均安装在躯干上,小腿电机通过带轮传动驱动小腿骨,减轻了腿部重量,从而减小机械狗的运动惯量,继而提高机械狗的整体机动性。
11、2、在对应电机的输出端设置对应的谐波减速器,各谐波减速器将对应的电机输出端转速降低到适当的速度,从而可以增大各电机的输出力矩,解决了目前电机驱动普遍承载能力较弱的问题。
12、3、同步带传动精确不会发生打滑现象满足机器狗所需的高精度要求同时传动效率高,动能减轻冲击和振动载荷,运转平稳。
技术特征:
1.一种四足仿生机械狗,其特征在于:包括躯干,躯干的前后两侧设置有腿部机构,腿部机构包括同轴的大腿电机和小腿电机,大腿电机的输出端固接有大腿谐波减速器,大腿谐波减速器的输出端与躯干固接,小腿电机的输出端固接有小腿谐波减速器,小腿谐波减速器的输出端与大腿电机的壳体固接,小腿电机的壳体外侧套接有大腿骨,大腿骨的上侧收容有套接于小腿电机壳体外侧的主动轮,主动轮通过同步带连接有从动轮,从动轮固接于大腿骨的下侧,从动轮的侧壁固接有小腿骨,小腿骨的外侧套接有小腿外壳,小腿外壳的上侧通过转轴枢接有大腿外壳,大腿外壳套接于大腿骨的外侧,转轴贯穿于从动轮,小腿外壳的下侧设置有足部。
2.根据权利要求1所述的四足仿生机械狗,其特征在于:所述躯干包括前半身,前半身的后侧设置有扭腰电机,扭腰电机的壳体固接于前半身的后侧,扭腰电机的输出端固接有扭腰谐波减速器,扭腰谐波减速器的输出端固接有腰部,腰部内侧设置有弓腰电机,弓腰电机的输出端固接有弓腰谐波减速器,弓腰谐波减速器的输出端与腰部固接,弓腰电机的壳体固接有后半身。
3.根据权利要求2所述的四足仿生机械狗,其特征在于:所述前半身的前侧上部固接有扭头舵机,扭头舵机的输出端通过支架固接有点头舵机,点头舵机的输出轴固接有头部。
4.根据权利要求3所述的四足仿生机械狗,其特征在于:所述头部的上侧设置有眼球,头部内设置有驱使眼球转动的眼部舵机。
5.根据权利要求4所述的四足仿生机械狗,其特征在于:所述头部的下侧设置有下颚,头部内设置有驱使下颚张合的嘴部舵机。
6.根据权利要求2所述的四足仿生机械狗,其特征在于:所述后半身的后侧设置有尾巴,后半身内设置有驱使尾巴转动的尾部舵机。
技术总结
本技术公开了一种四足仿生机械狗。该四足仿生机械狗包括躯干,躯干的前后两侧设置腿部机构,腿部机构包括同轴的大腿电机和小腿电机,大腿电机固接大腿谐波减速器,大腿谐波减速器与躯干固接,小腿电机固接小腿谐波减速器,小腿谐波减速器与大腿电机固接,小腿电机外侧套接大腿骨,大腿骨的上侧收容套接于小腿电机壳体外侧的主动轮,主动轮通过同步带连接从动轮,从动轮固接于大腿骨的下侧,从动轮的侧壁固接小腿骨,小腿骨的外侧套接小腿外壳,小腿外壳的上侧通过转轴枢接大腿外壳,大腿外壳套接于大腿骨的外侧,转轴贯穿于从动轮,小腿外壳的下侧设置足部。本技术解决了现有技术腿部重量大,惯量大而影响机械狗整体的机动性的问题。
技术研发人员:袁立鹏,赵慧,潘刚,宫赤坤,杨坤,许安定,杨宇航,方鸿磊,李龙坤,杨进
受保护的技术使用者:哈尔滨工业大学
技术研发日:20230516
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!