异形工件抓取装置的制作方法
本技术涉及工件加工,尤其涉及一种异形工件抓取装置。
背景技术:
1、在工业生产中,随着产品的多样化,常常会需要各种不同形状的异形工件,异形工件就是区别于标准件及普通的棒、环、饼型工件,如曲轴之类的等等。
2、相关技术中,一些异形工件在加工、转运的过程中需要针对其结构、形状单独制作一种抓取工装,用于对一种异形工件进行抓取。
3、然而,由于部分异形工件生产量较少,单独针对某一种异形工件制作抓取工装,需要耗费大量的人力、物料和时间,因此,会导致异形工件的生产成本高,生产效率低。
技术实现思路
1、本实用新型旨在至少在一定程度上解决上述技术中的技术问题之一。
2、为此,本实用新型的一个目的在于提出一种异形工件抓取装置,能够根据异形工件的形状、结构,自动调整抓取形态,适用于多种异形工件,可以降低生产成本,提高生产效率。
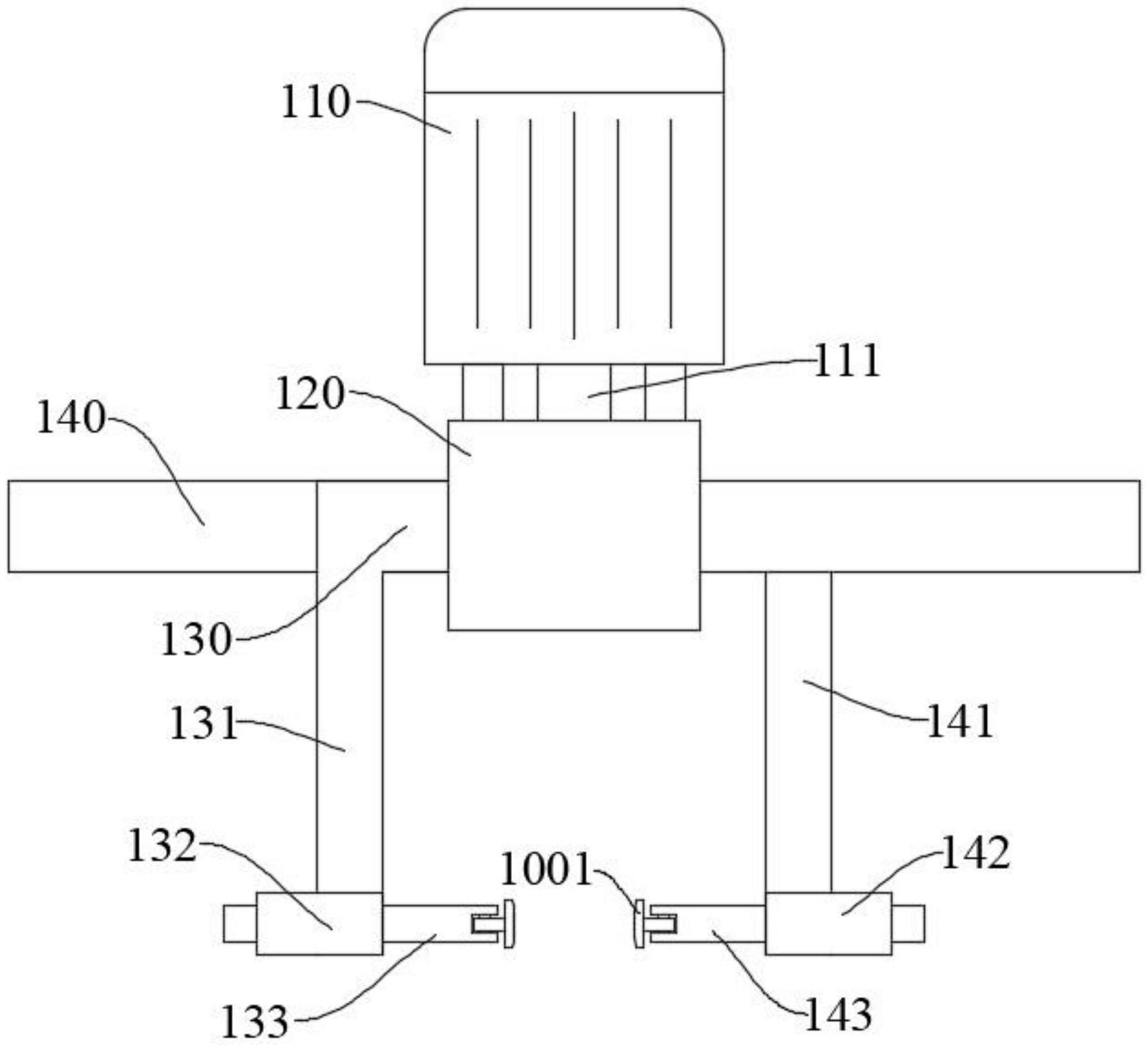
3、为达到上述目的,本实用新型一方面实施例提出了一种异形工件抓取装置,包括:抓取电机、抓取臂安装箱、第一抓取臂和第二抓取臂,其中,
4、所述抓取电机设置在所述抓取臂安装箱上,所述抓取电机上设置有驱动轴,所述驱动轴伸入所述抓取臂安装箱内,所述抓取臂安装箱内设置有驱动齿轮,所述驱动齿轮与所述驱动轴相连;
5、所述第一抓取臂和所述第二抓取臂分别可移动设置在所述抓取臂安装箱内,所述第一抓取臂和所述第二抓取臂分别位于所述驱动齿轮的两侧,且所述第一抓取臂和所述第二抓取臂分别与所述驱动齿轮相配合;
6、所述第一抓取臂上设置有第一抓取爪安装箱,所述第一抓取爪安装箱内设置有第一抓取爪、第二抓取爪和第一联动齿轮,所述第一抓取爪和所述第二抓取爪分别与所述第一联动齿轮相配合,所述第一抓取爪和所述第二抓取爪分别贯穿所述第一抓取爪安装箱;
7、所述第二抓取臂上设置有第二抓取爪安装箱,所述第二抓取爪安装箱内设置有第三抓取爪、第四抓取爪和第二联动齿轮,所述第三抓取爪和所述第四抓取爪分别与所述第二联动齿轮相配合,所述第三抓取爪和所述第四抓取爪分别贯穿所述第二抓取爪安装箱。
8、本实用新型实施例的异形工件抓取装置,能够根据异形工件的形状、结构,自动调整抓取形态,适用于多种异形工件,可以降低生产成本,提高生产效率。
9、另外,根据本实用新型上述实施例提出的异形工件抓取装置还可以具有如下附加的技术特征:
10、进一步地,所述抓取臂安装箱内设置有第一限位块和第二限位块,所述第一限位块和所述第二限位块分别设置在所述抓取臂安装箱内部的两端,且位于所述第一抓取臂和所述第二抓取臂之间。
11、进一步地,所述第一抓取臂的一端设置有第一抓取支臂,所述第一抓取支臂的一端与所述第一抓取臂相连,所述第一抓取支臂的另一端设置所述第一抓取爪安装箱;
12、所述第二抓取臂的一端设置有第二抓取支臂,所述第二抓取支臂的一端与所述第二抓取臂相连,所述第二抓取支臂的另一端设置所述第二抓取爪安装箱;
13、所述第一抓取支臂与所述第二抓取支臂分别位于所述抓取臂安装箱的两侧。
14、进一步地,所述第一抓取爪安装箱与所述第二抓取爪安装箱相对称设置,其中,所述第一抓取爪和第三抓取爪设置在同一条直线上,所述第二抓取爪和所述第四抓取爪设置在同一条直线上。
15、进一步地,所述第一抓取爪、所述第二抓取爪、所述第三抓取爪和所述第四抓取爪的一端分别铰接有抓取垫片。
16、本实用新型附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
技术特征:
1.一种异形工件抓取装置,其特征在于,包括:抓取电机、抓取臂安装箱、第一抓取臂和第二抓取臂,其中,
2.根据权利要求1所述的异形工件抓取装置,其特征在于,所述抓取臂安装箱内设置有第一限位块和第二限位块,所述第一限位块和所述第二限位块分别设置在所述抓取臂安装箱内部的两端,且位于所述第一抓取臂和所述第二抓取臂之间。
3.根据权利要求1所述的异形工件抓取装置,其特征在于,所述第一抓取臂的一端设置有第一抓取支臂,所述第一抓取支臂的一端与所述第一抓取臂相连,所述第一抓取支臂的另一端设置所述第一抓取爪安装箱;
4.根据权利要求3所述的异形工件抓取装置,其特征在于,所述第一抓取爪安装箱与所述第二抓取爪安装箱相对称设置,其中,所述第一抓取爪和第三抓取爪设置在同一条直线上,所述第二抓取爪和所述第四抓取爪设置在同一条直线上。
5.根据权利要求1所述的异形工件抓取装置,其特征在于,所述第一抓取爪、所述第二抓取爪、所述第三抓取爪和所述第四抓取爪的一端分别铰接有抓取垫片。
技术总结
本技术提出一种异形工件抓取装置,包括抓取电机、抓取臂安装箱、第一抓取臂和第二抓取臂,其中,抓取电机设置在抓取臂安装箱上,抓取电机上设置有驱动轴,驱动轴伸入抓取臂安装箱内,抓取臂安装箱内设置有驱动齿轮,驱动齿轮与驱动轴相连;第一抓取臂和第二抓取臂分别可移动设置在抓取臂安装箱内,第一抓取臂和第二抓取臂分别位于驱动齿轮的两侧,且第一抓取臂和第二抓取臂分别与驱动齿轮相配合;第一抓取臂上设置有第一抓取爪、第二抓取爪和第一联动齿轮,第二抓取臂上设置有第三抓取爪、第四抓取爪和第二联动齿轮。由此,能够根据异形工件的形状、结构,自动调整抓取形态,适用于多种异形工件,可以降低生产成本,提高生产效率。
技术研发人员:牛广华,牛猛,赵建
受保护的技术使用者:徐州鑫发机械有限公司
技术研发日:20230517
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!