一种刚柔耦合驱动的三指夹爪的制作方法
本技术涉及机器人领域,尤其涉及一种刚柔耦合驱动的三指夹爪。
背景技术:
1、早期传统夹爪多为刚性结构,虽已广泛应用于工业、医学、建筑业等领域,但有限的自由度,使其只能用来执行单一任务,当生产线上存在多种物体时需要频繁更换夹爪且易损伤物体表面。随着科技的发展,早期刚性夹爪逐渐落后,新的刚性夹爪如五指机械手、智能机械手、自适应电爪等产品不断涌现,这些夹爪的出现在一定程度上改善了机器人在生产线上不能抓取多种物品的问题,但是由于与物品表面仍为硬接触,难以保证物体表面的完整性,所以刚性夹爪仍然不能满足机器人智能化、生产线柔性化、物品多样化发展的趋势,进而发展出柔性夹爪。
2、使用软材料制作的夹爪逐渐被应用在机器人末端,这类夹爪具有自由度高、延展性强、成本低等优点,但是会面临夹取力不足的问题,受到外力冲击时,易受到损坏。若在设计中结合使用刚性和软体材料,综合两者的长处,消除各自的短板,就能进一步扩展提升夹爪的抓取能力,因此设计一款刚软耦合驱动的三指夹爪成为了本领域技术人员亟待解决的研发方向。
技术实现思路
1、本实用新型所要解决的技术问题是克服现有技术中存在的不足,提供一种刚柔耦合驱动的三指夹爪。
2、本实用新型是通过以下技术方案予以实现:
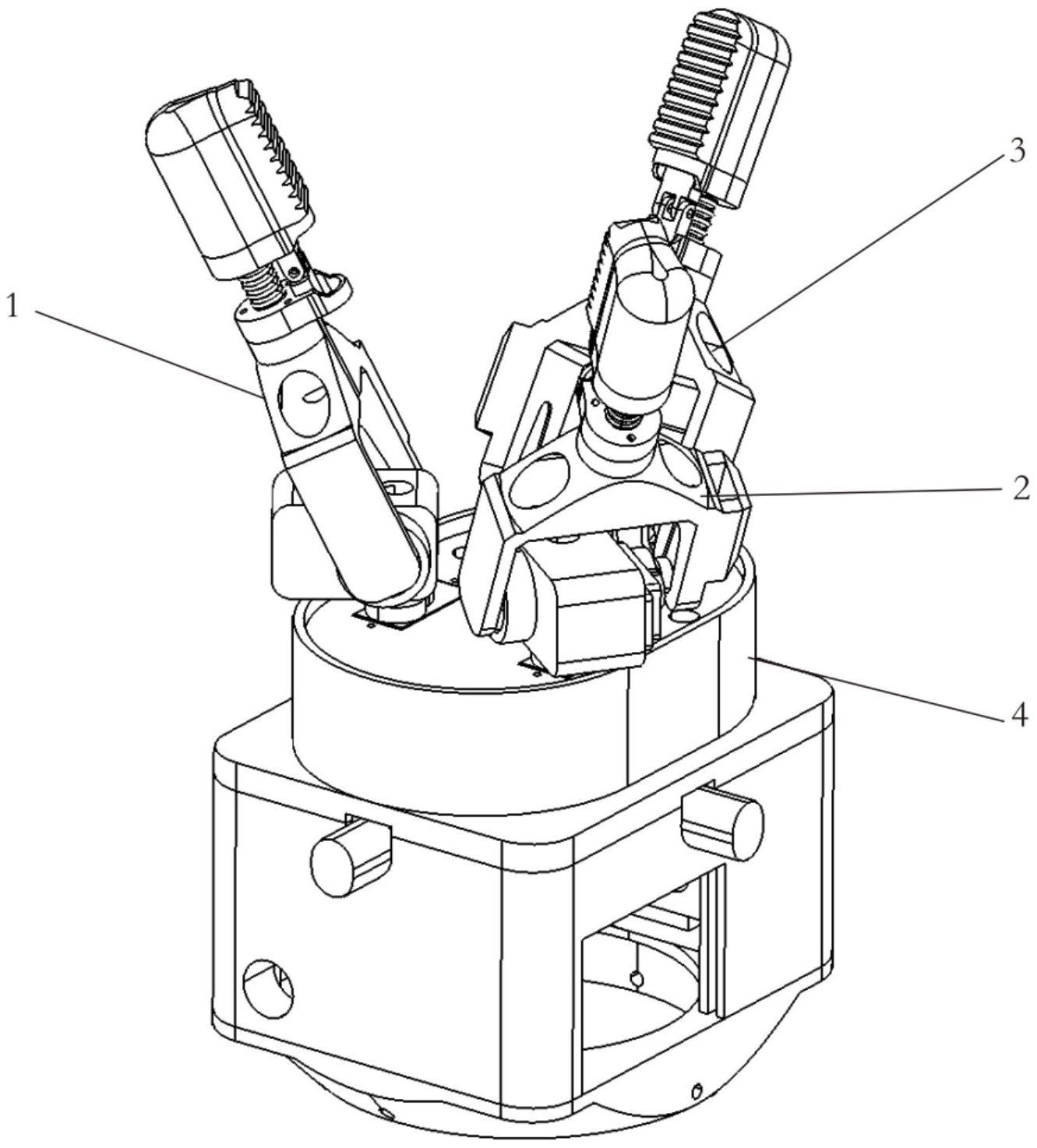
3、一种刚柔耦合驱动的三指夹爪,包括驱动底座以及安装于驱动底座上方的执行机构,所述执行机构包括连接于驱动底座上方的第一夹爪组件、第二夹爪组件、第三夹爪组件以及分别与第一夹爪组件、第二夹爪组件、第三夹爪组件相连的气泵,所述第一夹爪组件、第二夹爪组件、第三夹爪组件为多指节结构。
4、根据上述技术方案,优选地,所述第一夹爪组件包括设于驱动底座上方的舵机a、与舵机a相连的下指节刚性部件a、与下指节刚性部件a上端铰接的上指节刚性部件a,所述上指节刚性部件a与下指节刚性部件a之间通过柔性波纹管a相连接。
5、根据上述技术方案,优选地,所述第二夹爪组件包括设于驱动底座上方的舵机b、与舵机b相连的下指节刚性部件b、与下指节刚性部件b上端铰接的上指节刚性部件b,所述上指节刚性部件b与下指节刚性部件b之间通过柔性波纹管b相连接。
6、根据上述技术方案,优选地,所述第三夹爪组件包括设于驱动底座上方的舵机c、与舵机c相连的下指节刚性部件c、与下指节刚性部件c上端铰接的上指节刚性部件c,所述上指节刚性部件c与下指节刚性部件c之间通过柔性波纹管c相连接。
7、根据上述技术方案,优选地,所述第一夹爪组件和第二夹爪组件分别转动连接于驱动底座上,所述第三夹爪组件固定连接于驱动底座上。
8、根据上述技术方案,优选地,所述驱动底座内上部相对舵机a、舵机b的位置分别安装有舵机d、舵机e,所述舵机d贯穿驱动底座并与舵机a下方相连接,所述舵机e贯穿驱动底座并与舵机b下方相连接。
9、根据上述技术方案,优选地,所述上指节刚性部件a、上指节刚性部件b、上指节刚性部件c的侧壁为柔性波纹状结构。
10、根据上述技术方案,优选地,所述下指节刚性部件a、下指节刚性部件b、下指节刚性部件c为拱形结构,所述舵机a、舵机b、舵机c的一侧与下指节刚性部件a、下指节刚性部件b、下指节刚性部件c的一侧固定连接,舵机a、舵机b、舵机c的另一侧与下指节刚性部件a、下指节刚性部件b、下指节刚性部件c的另一侧转动连接。
11、本实用新型的有益效果是:
12、本实用新型通过刚性结构和柔性结构的结合设计,可在物体抓取过程中具有良好的自适应性和柔顺性,在不过多增加夹爪自由度的情况下,通过合理设计夹爪结构使装置获得较高的抓取能力,集成度高且重量轻,扩大夹爪在工业、医疗、军事和探测等方面的应用领域,具有较高的应用推广价值。
技术特征:
1.一种刚柔耦合驱动的三指夹爪,其特征在于,包括驱动底座以及安装于驱动底座上方的执行机构,所述执行机构包括连接于驱动底座上方的第一夹爪组件、第二夹爪组件、第三夹爪组件以及分别与第一夹爪组件、第二夹爪组件、第三夹爪组件相连的气泵,所述第一夹爪组件、第二夹爪组件、第三夹爪组件为多指节结构。
2.根据权利要求1所述一种刚柔耦合驱动的三指夹爪,其特征在于,所述第一夹爪组件包括设于驱动底座上方的舵机a、与舵机a相连的下指节刚性部件a、与下指节刚性部件a上端铰接的上指节刚性部件a,所述上指节刚性部件a与下指节刚性部件a之间通过柔性波纹管a相连接。
3.根据权利要求2所述一种刚柔耦合驱动的三指夹爪,其特征在于,所述第二夹爪组件包括设于驱动底座上方的舵机b、与舵机b相连的下指节刚性部件b、与下指节刚性部件b上端铰接的上指节刚性部件b,所述上指节刚性部件b与下指节刚性部件b之间通过柔性波纹管b相连接。
4.根据权利要求3所述一种刚柔耦合驱动的三指夹爪,其特征在于,所述第三夹爪组件包括设于驱动底座上方的舵机c、与舵机c相连的下指节刚性部件c、与下指节刚性部件c上端铰接的上指节刚性部件c,所述上指节刚性部件c与下指节刚性部件c之间通过柔性波纹管c相连接。
5.根据权利要求4所述一种刚柔耦合驱动的三指夹爪,其特征在于,所述第一夹爪组件和第二夹爪组件分别转动连接于驱动底座上,所述第三夹爪组件固定连接于驱动底座上。
6.根据权利要求5所述一种刚柔耦合驱动的三指夹爪,其特征在于,所述驱动底座内上部相对舵机a、舵机b的位置分别安装有舵机d、舵机e,所述舵机d贯穿驱动底座并与舵机a下方相连接,所述舵机e贯穿驱动底座并与舵机b下方相连接。
7.根据权利要求4-6中任意一项的所述一种刚柔耦合驱动的三指夹爪,其特征在于,所述上指节刚性部件a、上指节刚性部件b、上指节刚性部件c的侧壁为柔性波纹状结构。
8.根据权利要求4-6中任意一项的所述一种刚柔耦合驱动的三指夹爪,其特征在于,所述下指节刚性部件a、下指节刚性部件b、下指节刚性部件c为拱形结构,所述舵机a、舵机b、舵机c的一侧与下指节刚性部件a、下指节刚性部件b、下指节刚性部件c的一侧固定连接,舵机a、舵机b、舵机c的另一侧与下指节刚性部件a、下指节刚性部件b、下指节刚性部件c的另一侧转动连接。
技术总结
本技术涉及一种刚柔耦合驱动的三指夹爪,包括驱动底座以及安装于驱动底座上方的执行机构,执行机构包括连接于驱动底座上方的第一夹爪组件、第二夹爪组件、第三夹爪组件以及分别与第一夹爪组件、第二夹爪组件、第三夹爪组件相连的气泵,第一夹爪组件、第二夹爪组件、第三夹爪组件为多指节结构,第一夹爪组件和第二夹爪组件分别转动连接于驱动底座上,第三夹爪组件固定连接于驱动底座上。本技术通过刚性结构和柔性结构的结合,可在物体抓取过程中具有良好的自适应性和柔顺性,在不过多增加夹爪自由度的情况下,通过合理设计夹爪结构使装置获得较高的抓取能力,集成度高且重量轻,扩大夹爪在工业、医疗、军事和探测等方面的应用领域。
技术研发人员:杜宇,刘冬,于旭,宋志强,崔瑛雪,宁丹阳,林贤治
受保护的技术使用者:大连大华中天科技有限公司
技术研发日:20230517
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!