一种机械手的制作方法
本申请涉及机械电子,尤其是一种机械手。
背景技术:
1、机械手是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影,尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维空间上的某一点进行作业。
2、公开号为cn201821857591.4的专利说明书中公开了一种专用于抓取机械零件的可吸附磁性机械手臂,所述机械手臂包括:底座,所述底座内部底端安装有电动机,且电动机上端通过转子转动连接有连轴,所述线圈呈螺旋状缠在所述夹臂中部。
3、上述中的现有技术方案存在不足之处,机械手臂的作业范围较大,从而导致机械手臂消耗的能源过多,不方便定位夹取使用,节能效果较差。因此,针对上述问题提出一种机械手。
技术实现思路
1、在本实施例中提供了一种机械手用于解决现有技术方案存在不足之处,机械手臂的作业范围较大,从而导致机械手臂消耗的能源过多,不方便定位夹取使用,节能效果较差的问题。
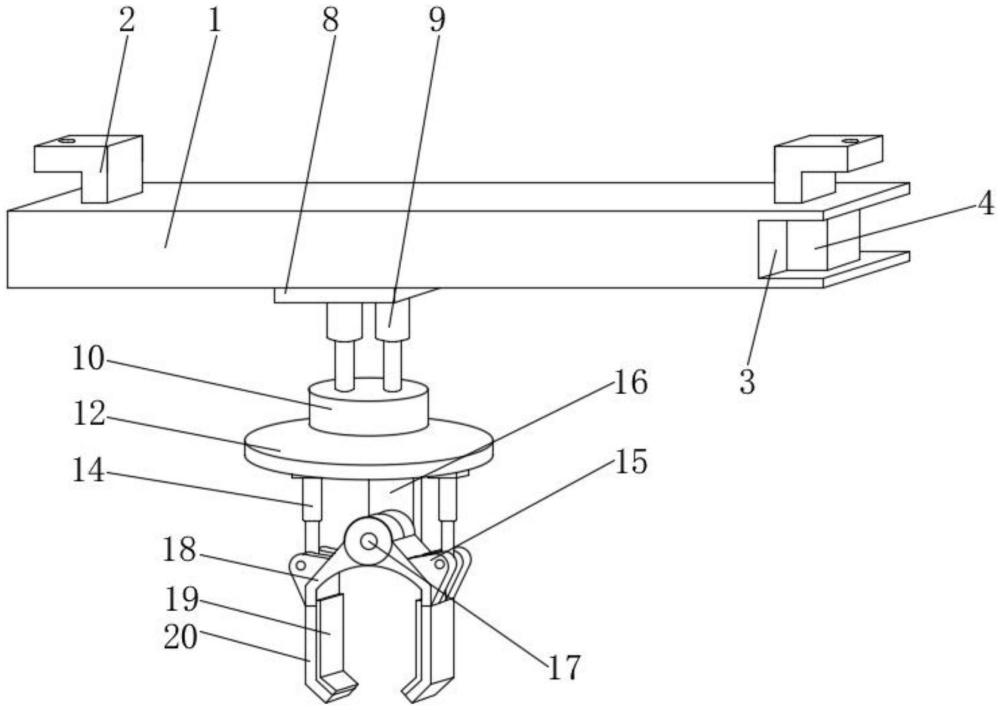
2、根据本申请的一个方面,提供了一种机械手,包括固定板、安装座以及调节装置和夹持装置;
3、所述调节装置包括安装板、安装槽、电机、活动槽、丝杆和活动块,所述固定板的顶端固定连接安装板,所述固定板的底部开设有活动槽,所述活动槽的内部滑动连接活动块;
4、所述夹持装置包括连接板、电动推杆、连接座、螺纹头、安装座、固定座、液压杆、连接块、支撑板、固定轴、活动臂、防滑垫和夹持臂,所述活动块的底端固定连接连接板,所述连接板的底端安装有电动推杆,所述电动推杆的输出端固定连接连接座的顶端。
5、进一步地,所述活动槽为t型槽,所述活动槽的内部转动连接丝杆,所述丝杆螺纹连接活动块。
6、进一步地,所述固定板的一端侧壁开设有安装槽,所述安装槽的内部安装有电机,所述电机的输出端固定连接丝杆的一端。
7、进一步地,所述连接座的内部螺纹连接螺纹头,所述螺纹头的底端固定连接安装座,所述安装座的底端两侧均固定连接固定座。
8、进一步地,所述固定座的内部转动连接液压杆的一端,所述液压杆的另一端转轴连接连接块,所述连接块固定连接在活动臂的外侧壁。
9、进一步地,所述安装座的底端固定连接支撑板,所述支撑板的一端通过固定轴转动连接两个活动臂,所述活动臂的一端固定连接夹持臂,所述夹持臂的一端固定连接防滑垫。
10、通过本申请上述实施例,采用了调节装置和夹持装置,解决了现有技术方案存在不足之处,机械手臂的作业范围较大,从而导致机械手臂消耗的能源过多,不方便定位夹取使用,节能效果较差的问题。
技术特征:
1.一种机械手,其特征在于:包括固定板(1)、安装座(12)以及调节装置和夹持装置;
2.根据权利要求1所述的一种机械手,其特征在于:所述活动槽(5)为t型槽,所述活动槽(5)的内部转动连接丝杆(6),所述丝杆(6)螺纹连接活动块(7)。
3.根据权利要求1所述的一种机械手,其特征在于:所述固定板(1)的一端侧壁开设有安装槽(3),所述安装槽(3)的内部安装有电机(4),所述电机(4)的输出端固定连接丝杆(6)的一端。
4.根据权利要求1所述的一种机械手,其特征在于:所述连接座(10)的内部螺纹连接螺纹头(11),所述螺纹头(11)的底端固定连接安装座(12),所述安装座(12)的底端两侧均固定连接固定座(13)。
5.根据权利要求1所述的一种机械手,其特征在于:所述固定座(13)的内部转动连接液压杆(14)的一端,所述液压杆(14)的另一端转轴连接连接块(15),所述连接块(15)固定连接在活动臂(18)的外侧壁。
6.根据权利要求1所述的一种机械手,其特征在于:所述安装座(12)的底端固定连接支撑板(16),所述支撑板(16)的一端通过固定轴(17)转动连接两个活动臂(18),所述活动臂(18)的一端固定连接夹持臂(20),所述夹持臂(20)的一端固定连接防滑垫(19)。
技术总结
本申请公开了一种机械手,包括固定板、安装座以及调节装置和夹持装置;所述调节装置包括安装板、安装槽、电机、活动槽、丝杆和活动块,所述固定板的顶端固定连接安装板,所述固定板的底部开设有活动槽,所述活动槽的内部滑动连接活动块。本申请通过启动电动推杆,电动推杆推动连接座下移,从而调整夹取的高度,通过启动液压杆,液压杆推动连接块移动,连接块带动活动臂在固定轴作用下转动,两个活动臂带动夹持臂将物品夹取,通过防滑垫避免物品滑动,方便快速定位和夹持工件。
技术研发人员:顾思庭
受保护的技术使用者:顾思庭
技术研发日:20230522
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!