一种用于手动拖曳的关节模组及其形成的机械臂的制作方法
本技术涉及关节模组领域,尤其涉及一种用于手动拖曳的关节模组及其形成的机械臂。
背景技术:
1、关节模组作为机器人重要零部件,能实现快速生产、快速组建机器人,能够省掉上百种机械电子器件选型、设计、采购、组装的人力和时间成本。当关节模组位于机械臂末端的时候,需要确保其具有较高为位置调整灵活度,现有技术中均是采用驱动组件控制关节模组中电机运行来实现力矩输出,进而实现位置调整,这种调整方式需要较长的反馈时间,灵活度较低。
技术实现思路
1、本实用新型旨在至少在一定程度上解决相关技术中的问题之一。为此,本实用新型的目的在于提供一种用于手动拖曳的关节模组及其形成的机械臂,通过力矩传感器可以实现关节模组的手动拖曳,提高了关节模组和机械臂的灵活性。
2、为了实现上述目的,本申请采用如下技术方案:一种用于手动拖曳的关节模组,包括:
3、输出组件,包括输出轴和减速机,所述输出轴连接所述减速机;
4、输入组件,包括电机和输入轴,所述输入轴套设在输出轴外侧,所述电机包括电机定子、电机转子和电机轴,所述输入轴同时连接所述电机轴和减速机;
5、拖曳组件,位于输出轴一侧端部,包括力矩传感器和拖曳支架,所述力矩传感器的一端连接输出轴,另一端连接拖曳支架,且力矩传感器与电机轴通讯连接;
6、关节臂,位于所述电机和减速机的外侧。
7、进一步的,所述拖曳支架套设在所述力矩传感器的外侧,且拖曳支架仅与力矩传感器接触。
8、进一步的,所述拖曳支架的顶部位于力矩传感器远离输出轴的一端,所述拖曳支架的侧边朝向所述输出轴方向延伸。
9、进一步的,还包括驱动组件,所述驱动组件包括控制板、编码器安装架和编码器,所述控制板位于输出轴的另一侧端部,所述编码器安装架位于输出轴周向外侧,所述编码器位于所述编码器安装架中。
10、进一步的,所述编码器安装架包括输入安装架和输出安装架,所述编码器包括输入端磁性编码器和输出端光学编码器;其中,所述输入端磁性编码器位于输入安装架中,所述输出端光学编码器位于输出安装架中,所述输出安装架位于输出轴的周向外侧,所述输出端光学编码器位于所述输出安装架靠近控制板的一端;所述输入安装架套设在所述输出安装架的外侧,所述输入端磁性编码器位于所述输出安装架远离输出轴的一端,且所述输入端磁性编码器和输出端光学编码器正对所述控制板。
11、进一步的,所述驱动组件的外侧设置有关节外壳,所述输入安装架和关节外壳之间设置有第一轴承;所述输入安装架和输出安装架之间设置有第二轴承。
12、进一步的,所述电机轴位于所述输入轴的周向外侧,所述电机转子位于所述电机轴的周向外侧,所述电机定子位于所述电机转子的周向外侧,所述电机定子与关节臂固定连接。
13、进一步的,所述减速机包括减速机固定部、减速机钢轮和减速机柔轮,所述减速机柔轮套设在所述输入轴的周向外侧,所述减速机钢轮位于所述减速机柔轮的周向外侧,所述减速机固定部位于所述减速机钢轮的周向外侧;所述减速机固定部和所述关节臂固定,所述减速机钢轮和减速机固定部之间通过第三轴承连接。
14、进一步的,所述关节臂与输入轴之间设置有第四轴承。
15、本申请还提供了一种机械臂,包括m个关节模组,其中,所述机械臂最末端的关节模组为如上所述的一种用于手动拖曳的关节模组;每个关节模组均包括电机,所述电机包括电机定子、电机转子和电机轴,所述力矩传感器与m个关节模组中至少一个电机轴通讯连接。
16、本申请实施例提供的上述技术方案与现有技术相比具有如下优点:本申请用于手动拖曳的关节模组包括输出组件、输入组件、拖曳组件和支撑外壳,其中,输出组件包括输出轴和减速机,所述输出轴连接所述减速机;输入组件包括电机和输入轴,所述电机包括电机定子、电机转子和电机轴;所述输入轴套设在输出轴外侧,所述输入轴同时连接所述电机轴和减速机;拖曳组件位于输出轴一侧端部,包括力矩传感器和拖曳支架,所述力矩传感器的一端连接输出轴,另一端连接拖曳支架,且力矩传感器与电机轴通讯连接;关节臂,位于所述电机和减速机的外侧。本申请力矩传感器和电机轴通讯连接,当力矩传感器感受到拖曳支架上的作用力时,电机轴处于松动状态,关节模组可以随着拖曳力实现移动,当力矩传感器不受力时,电机轴处于锁死状态,关节模组的位置固定;本申请通过力矩传感器和拖曳支架可以实现关节模组位置的手动调节,显著提高了关机模组和机械臂的灵活度。
技术特征:
1.一种用于手动拖曳的关节模组,其特征在于,包括:
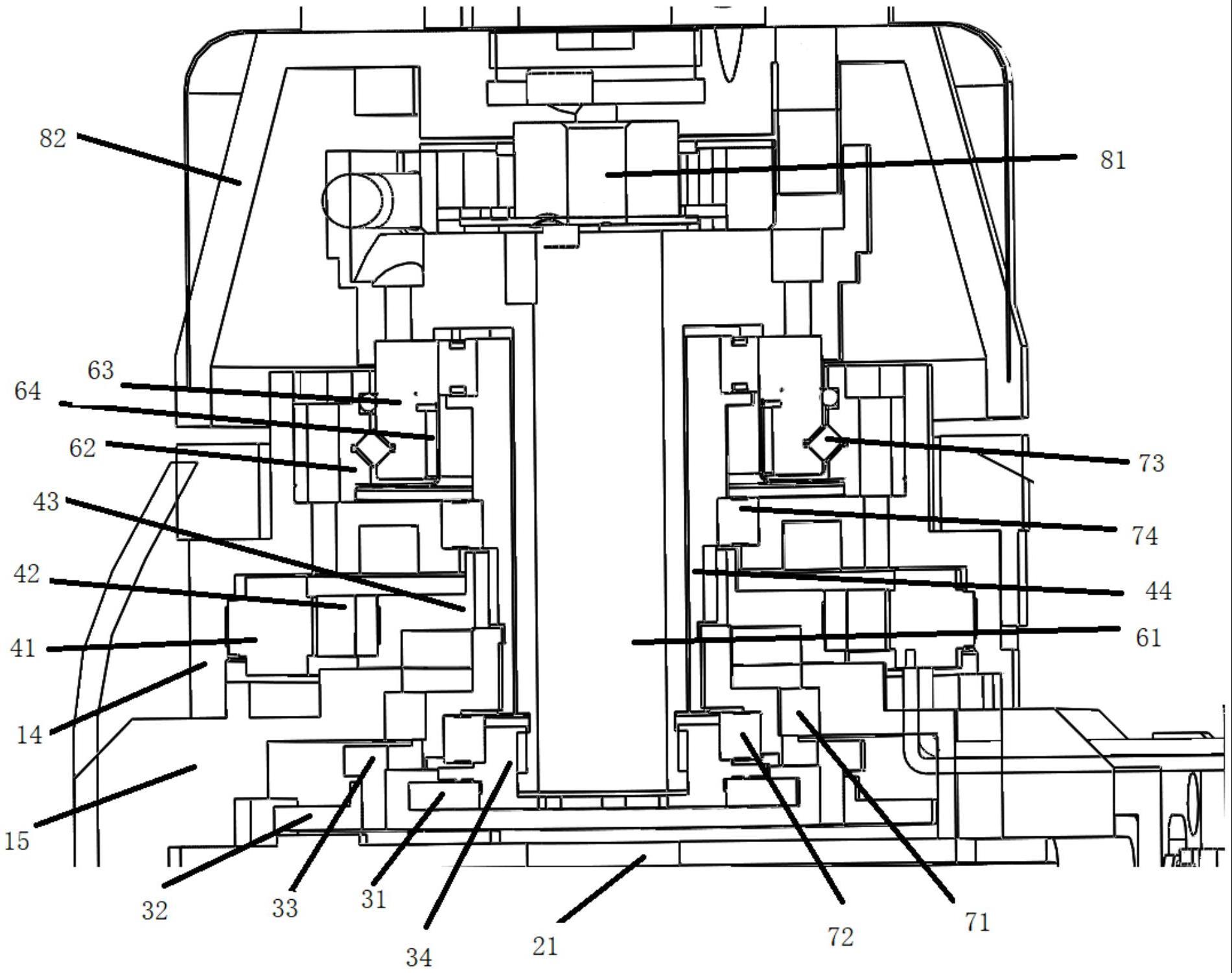
2.根据权利要求1所述的一种用于手动拖曳的关节模组,其特征在于,所述拖曳支架(82)套设在所述力矩传感器(81)的外侧,且拖曳支架(82)仅与力矩传感器(81)接触。
3.根据权利要求2所述的一种用于手动拖曳的关节模组,其特征在于,所述拖曳支架(82)的顶部位于力矩传感器(81)远离输出轴(61)的一端,所述拖曳支架(82)的侧边朝向所述输出轴(61)方向延伸。
4.根据权利要求1所述的一种用于手动拖曳的关节模组,其特征在于,还包括驱动组件,所述驱动组件包括控制板(21)、编码器安装架和编码器,所述控制板(21)位于输出轴(61)的另一侧端部,所述编码器安装架位于输出轴(61)周向外侧,所述编码器位于所述编码器安装架中。
5.根据权利要求4所述的一种用于手动拖曳的关节模组,其特征在于,所述编码器安装架包括输入安装架(33)和输出安装架(34),所述编码器包括输入端磁性编码器(32)和输出端光学编码器(31);其中,所述输入端磁性编码器(32)位于输入安装架(33)中,所述输出端光学编码器(31)位于输出安装架(34)中,所述输出安装架(34)位于输出轴(61)的周向外侧,所述输出端光学编码器(31)位于所述输出安装架(34)靠近控制板(21)的一端;所述输入安装架(33)套设在所述输出安装架(34)的外侧,所述输入端磁性编码器(32)位于所述输出安装架(34)远离输出轴(61)的一端,且所述输入端磁性编码器(32)和输出端光学编码器(31)正对所述控制板(21)。
6.根据权利要求5所述的一种用于手动拖曳的关节模组,其特征在于,所述驱动组件的外侧设置有关节外壳(15),所述输入安装架(33)和关节外壳(15)之间设置有第一轴承(71);所述输入安装架(33)和输出安装架(34)之间设置有第二轴承(72)。
7.根据权利要求1所述的一种用于手动拖曳的关节模组,其特征在于,所述电机轴(43)位于所述输入轴(44)的周向外侧,所述电机转子(42)位于所述电机轴(43)的周向外侧,所述电机定子(41)位于所述电机转子(42)的周向外侧,所述电机定子(41)与关节臂(14)固定连接。
8.根据权利要求1所述的一种用于手动拖曳的关节模组,其特征在于,所述减速机包括减速机固定部(62)、减速机钢轮(63)和减速机柔轮(64),所述减速机柔轮(64)套设在所述输入轴(44)的周向外侧,所述减速机钢轮(63)位于所述减速机柔轮(64)的周向外侧,所述减速机固定部(62)位于所述减速机钢轮(63)的周向外侧;所述减速机固定部(62)和所述关节臂(14)固定,所述减速机钢轮(63)和减速机固定部(62)之间通过第三轴承(73)连接。
9.根据权利要求1所述的一种用于手动拖曳的关节模组,其特征在于,所述关节臂(14)与输入轴(44)之间设置有第四轴承(74)。
10.一种机械臂,其特征在于,包括m个关节模组,其中,所述机械臂最末端的关节模组为权利要求1-9任意一项所述的一种用于手动拖曳的关节模组;每个关节模组均包括电机,所述电机包括电机定子(41)、电机转子(42)和电机轴(43),所述力矩传感器与m个关节模组中至少一个电机轴(43)通讯连接。
技术总结
本技术公开了一种用于手动拖曳的关节模组及其形成的机械臂,其中关节模组包括:输出组件,包括输出轴和减速机,所述输出轴连接所述减速机;输入组件,包括电机和输入轴,所述输入轴套设在输出轴外侧,所述电机包括电机定子、电机转子和电机轴,所述输入轴同时连接所述电机轴和减速机;拖曳组件,位于输出轴一侧端部,包括力矩传感器和拖曳支架,所述力矩传感器的一端连接输出轴,另一端连接拖曳支架,且力矩传感器与电机轴通讯连接;关节臂,位于所述电机和减速机的外侧。本技术提供的一种用于手动拖曳的关节模组,通过力矩传感器可以实现关节模组的手动拖曳,提高了关节模组的灵活性。
技术研发人员:魏愷含,张荣锋,邵明昊,唐文彬,宓海,蔡宁,王乾,林健,诸葛晓钟,唐雨辰,朱志军
受保护的技术使用者:上海极睿医疗科技有限公司
技术研发日:20230523
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!