轻载可重构的模块化驱动动力装置及六轴装配机器人的制作方法
本技术涉及机器人,特指一种轻载可重构的模块化驱动动力装置及六轴装配机器人。
背景技术:
1、在现有技术中,存在着各种各样的机器人,如申请号为cn202122844938.x的中国实用新型专利,其公开了一种用于电子产品激光打标的耳机盒搬运机器人;如申请号为cn202122392409.0的中国实用新型专利,其公开了一种用于电子产品的搬运机械臂;现有技术中的用于3c电子产品的机器人大多结构都与上述两种机器人结构相类似。虽然现有技术中的机器人均能满足对物料、产品等进行搬运的使用需求,但是现有的机器人都是整机固化型的,要么只能是三轴、四轴、五轴或六轴型机器人,无法对机器人进行重构组装,在面对不同使用需求时,只能重新采购不同轴型的机器人进行使用,使用局限性较大且实用性较低。
2、因此,基于上述现有的轻载机器人的缺陷,需要对现有的轻载机器人进行改进。
技术实现思路
1、本实用新型的目的在于针对现有技术的不足提供一种轻载可重构的模块化驱动动力装置及六轴装配机器人,该机器人解决了现有的轻载机器人所存在的:无法对机器人进行重构组装、使用局限性较大等缺陷。
2、为实现上述目的,本实用新型是通过以下技术方案实现的。
3、轻载可重构的模块化驱动动力装置,包括底壳、外壳、关节、连轴、减速器、电机,底壳的底部具有环形连接部,环形连接部的周缘都均匀开设有安装孔;底壳内安装有减速器,电机驱动减速器;关节的顶部具有环形连接部,环形连接部的周缘都均匀开设有安装孔,关节的下方配有轴承、套管,连轴从关节内向下穿过套管连接减速器,关节的环形连接部位于外壳的上端面。
4、进一步的,所述的底壳的环形连接部与关节的环形连接部同轴设置。
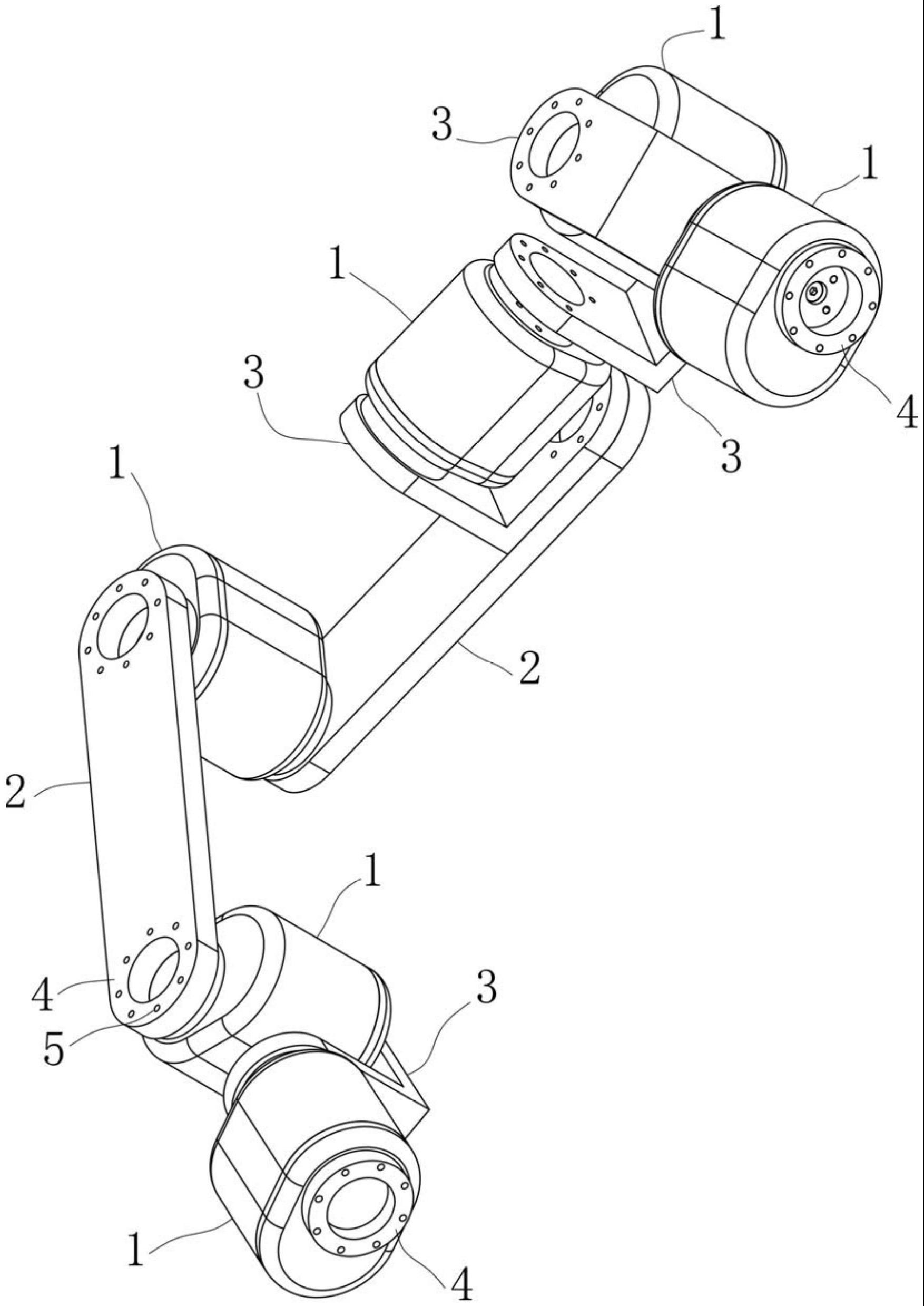
5、轻载可重构的模块化六轴装配机器人,包括多个驱动动力装置、传动连杆、l型连接件,驱动动力装置、传动连杆、l型连接件分别具有两个环形连接部,环形连接部的周缘都均匀开设有安装孔,相邻的驱动动力装置通过传动连杆或者l型连接件连接。
6、进一步的,所述的驱动动力装置包括底壳、外壳、关节、连轴、减速器、电机,底壳的底部具有环形连接部,环形连接部的周缘都均匀开设有安装孔;底壳内安装有减速器,电机驱动减速器;关节的顶部具有环形连接部,环形连接部的周缘都均匀开设有安装孔,关节的下方配有轴承、套管,连轴从关节内向下穿过套管连接减速器,关节的环形连接部位于外壳的上端面。
7、进一步的,所述的底壳的环形连接部与关节的环形连接部同轴设置。
8、进一步的,所述的各环形连接部大小一致,安装孔数量、位置一致。
9、进一步的,所述的l型连接件,包括呈90度弯折的连接板。
10、进一步的,所述的l型连接件采用呈90度弯折的连接管,连接管的两端都具有环形连接部。
11、进一步的,所述的传动连杆采用条形平板结构,它的两端分别具有环形连接部。
12、进一步的,所述的传动连杆采用两个部分组合成伸缩结构,一个部分是伸缩杆,另一个部分是伸缩套管,伸缩杆活动插设于伸缩套管内,伸缩杆的一端具有环形连接部,伸缩套管的一端具有环形连接部。
13、本实用新型的有益效果在于:各部分均为模块化,能够进行任意组装、构建,从而能够根据具体使用情况来组装、构建所需自由度的多轴机器人,能够避免以往需不断重新采购不同轴型的机器人来满足生产使用需求的情况,能够大大地降低成本、经济效益好。
技术特征:
1.轻载可重构的模块化驱动动力装置,其特征在于:包括底壳、外壳、关节、连轴、减速器、电机,底壳的底部具有环形连接部,环形连接部的周缘都均匀开设有安装孔;底壳内安装有减速器,电机驱动减速器;关节的顶部具有环形连接部,环形连接部的周缘都均匀开设有安装孔,关节的下方配有轴承、套管,连轴从关节内向下穿过套管连接减速器,关节的环形连接部位于外壳的上端面。
2.根据权利要求1所述的轻载可重构的模块化驱动动力装置,其特征在于:所述的底壳的环形连接部与关节的环形连接部同轴设置。
3.轻载可重构的模块化六轴装配机器人,其特征在于:包括多个驱动动力装置、传动连杆、l型连接件,驱动动力装置、传动连杆、l型连接件分别具有两个环形连接部,环形连接部的周缘都均匀开设有安装孔,相邻的驱动动力装置通过传动连杆或者l型连接件连接。
4.根据权利要求3所述的轻载可重构的模块化六轴装配机器人,其特征在于:所述的驱动动力装置包括底壳、外壳、关节、连轴、减速器、电机,底壳的底部具有环形连接部,环形连接部的周缘都均匀开设有安装孔;底壳内安装有减速器,电机驱动减速器;关节的顶部具有环形连接部,环形连接部的周缘都均匀开设有安装孔,关节的下方配有轴承、套管,连轴从关节内向下穿过套管连接减速器,关节的环形连接部位于外壳的上端面。
5.根据权利要求4所述的轻载可重构的模块化六轴装配机器人,其特征在于:所述的底壳的环形连接部与关节的环形连接部同轴设置。
6.根据权利要求3所述的轻载可重构的模块化六轴装配机器人,其特征在于:各个所述的环形连接部大小一致,安装孔数量、位置一致。
7.根据权利要求3所述的轻载可重构的模块化六轴装配机器人,其特征在于:所述的l型连接件,包括呈90度弯折的连接板。
8.根据权利要求3所述的轻载可重构的模块化六轴装配机器人,其特征在于:所述的l型连接件采用呈90度弯折的连接管,连接管的两端都具有环形连接部。
9.根据权利要求3所述的轻载可重构的模块化六轴装配机器人,其特征在于:所述的传动连杆采用条形平板结构,它的两端分别具有环形连接部。
10.根据权利要求3所述的轻载可重构的模块化六轴装配机器人,其特征在于:所述的传动连杆采用两个部分组合成伸缩结构,一个部分是伸缩杆,另一个部分是伸缩套管,伸缩杆活动插设于伸缩套管内,伸缩杆的一端具有环形连接部,伸缩套管的一端具有环形连接部。
技术总结
本技术涉及机器人技术领域,特指一种轻载可重构的模块化驱动动力装置及六轴装配机器人;本技术轻载可重构的模块化六轴装配机器人,包括多个驱动动力装置、传动连杆、L型连接件,驱动动力装置、传动连杆、L型连接件分别具有两个环形连接部,环形连接部的周缘都均匀开设有安装孔,相邻的驱动动力装置通过传动连杆或者L型连接件连接。各部分均为模块化,能够进行任意组装、构建,从而能够根据具体使用情况来组装、构建所需自由度的多轴机器人,能够避免以往需不断重新采购不同轴型的机器人来满足生产使用需求的情况,能够大大地降低成本、经济效益好。
技术研发人员:钟辉,丁度坤,辛曼玉,蒋明华,李福生,林显明
受保护的技术使用者:广东汇兴精工智造股份有限公司
技术研发日:20230527
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!