一种机械手定位装置的制作方法
本技术涉及晶圆传输设备领域,具体涉及一种机械手定位装置。
背景技术:
1、机械手被广泛应用在晶圆传输设备中,尤其是在晶圆制造的设备前端模块(efem)中,更是需要通过晶圆输送机器人对晶圆进行传输。在安装和调试efem的过程中,需要对efem的各个单元的位置进行调整和设定。其中也包括对机械手的末端执行器取放晶圆的空间位置进行示教和调整。在半导体传输设备的传输过程中,通过机器人的末端执行器将晶圆盒中的晶圆搬送到制成的设备中去。由于晶圆盒是不能通过人工手动打开的,因此需要一个能够自动打开晶圆盒的系统,称为晶圆装载系统。
2、目前,对末端执行器10的调整存在如下几种方法。方法一:将实际工况下需要取放的晶圆盒和晶圆放置到位,通过肉眼判断末端执行器和晶圆之间的相对位置。如图6所示,末端执行器10的两个个吸附点形成的中心需要和晶圆20的圆心o重合。图7展示的是晶圆装载系统,系统的晶圆装载平台上有一组刻线,这个刻线的中心在水平方向上和晶圆是同心的。在使用时,在垂直方向上晶圆比晶圆装载平台30面高49mm。
3、使用上述方法一是先把晶圆盒放置在晶圆装载平台上,并在晶圆盒中需要取晶圆的位置上放置一片晶圆,然后通过控制机器人的末端执行器逐渐靠近晶圆,最终目测一个合适的位置。在该种情况下,通过放置晶圆盒和晶圆后,晶圆盒作为标准件可以使晶圆的圆心与刻线中心同心,晶圆高于晶圆装载平台面49mm的位置,然后调节末端执行器10,使末端执行器10与晶圆之间的相对位置达到要求。这种方法由于采用肉眼观测,没有可靠的参照物,调试时间长,调整精度差。同时由于在实际工况下,晶圆盒对晶圆和末端执行器10均存在一定程度的遮挡。这也使得对末端执行器10的调整更加的困难。
4、方法二:制做一个底部类似晶圆盒的工装,能够放置到在晶圆装载平台30上,工装上部有各种测量的基准面。通过测量各基准面到末端执行器的位置来保证末端执行器的空间位置。
5、在使用方法二的情况下,不直接使用晶圆盒和晶圆,而是通过提前计算尺寸的方式提前知道了末端执行器10和工装之间的相对位置。只要保证末端执行器10和工装之间的位置准确,就能保证末端执行器和晶圆装载系统之间的位置准确了。通过比对理论距离和实际距离间接判断末端执行器的位置是否正确。这种方法相比方法一在精度上有所提升,但是需要反复测量,导致调整的效率低,时间长。
6、以上两场方法都存在机械手末端执行器示教时间长,效率低,精度低的问题。在实际操作中容易出现因为调试不当导致的晶圆传输位置出现偏差或者碰撞等情况。
技术实现思路
1、为了解决上述问题,提高末端执行器的示教效率以及精度,本实用新型提出了一种机械手定位装置,包括:
2、安装板,其背面设置有定位组件;
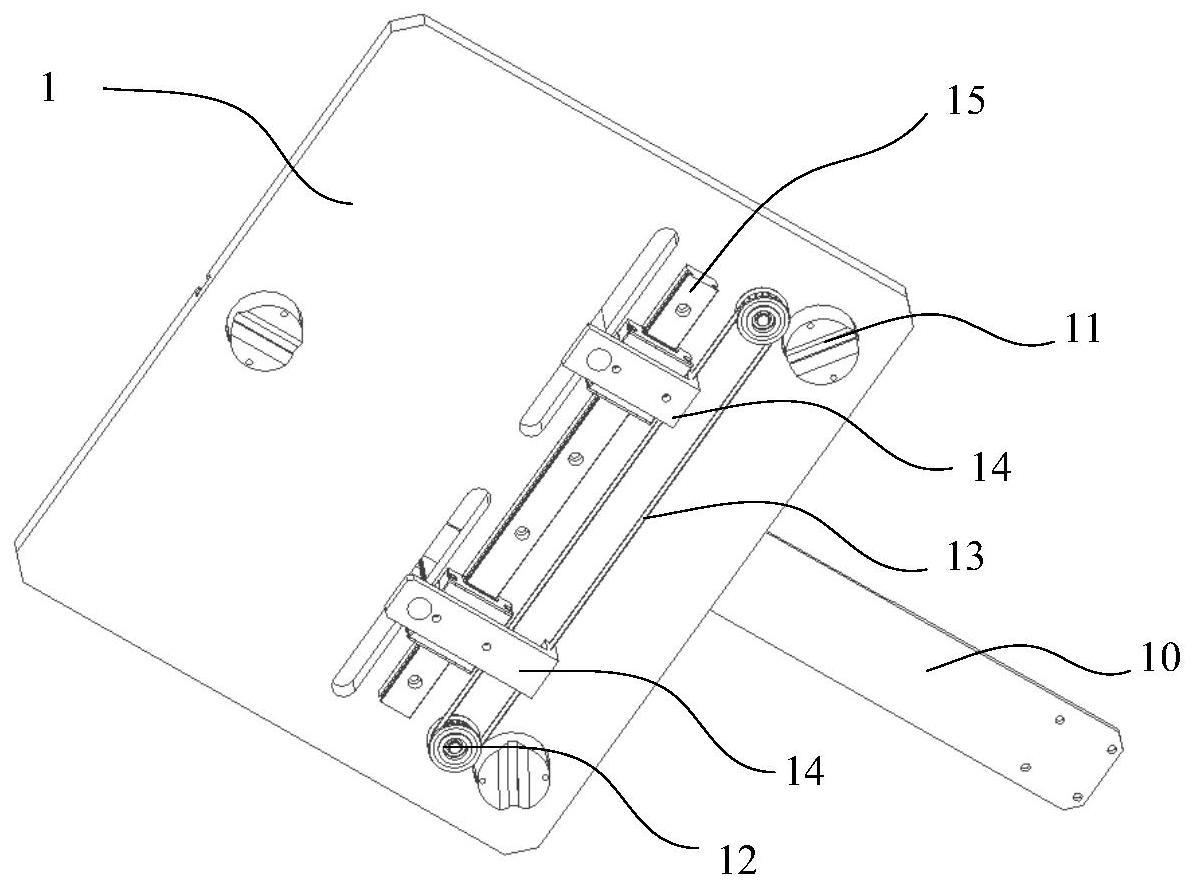
3、同步对中组件,包括设置在所述安装板背面的两个同步带惰轮、绕设在所述两个带惰轮之间的同步带、两个连接件;
4、两个所述连接件分别连接所述同步带移动方向相反的第一侧和第二侧;
5、两根刻度杆,两根刻度杆的第一端分别与两个所述连接件连接,第二端穿过安装板并延伸至其正面且高于正面;
6、参照组件,包括设置在所述安装板正面的滑槽以及与滑槽滑动连接的参照块,所述参照块高于所述安装板正面;
7、两根所述刻度杆分别位于所述滑槽的两侧,相对所述滑槽呈轴对称设置。
8、进一步地,所述安装板上开设有供所述刻度杆穿过的孔。
9、进一步地,所述滑槽的侧边设置有第一刻度。
10、进一步地,所述背面设置有导轨,导轨上滑动连接有两个滑块,两个所述连接件分别与两个滑块连接。
11、进一步地,所述导轨平行所述同步带设置。
12、进一步地,所述参照块表面设置有第二刻度。
13、进一步地,所述刻度杆表面设置有第三刻度。
14、使用所述机械手定位装置包含以下步骤:
15、将所述定位装置固定在晶圆装载平台表面;
16、粗调末端执行器到相对中心的位置;
17、推动所述刻度杆和末端执行器,直至两根所述刻度杆都与末端执行器的两侧接触;
18、推动参照块直至与末端执行器的顶部接触,调节末端执行器的水平面,直至末端执行器与参照块以及两根刻度杆接触的三处位置高度一致;
19、移动参照块至预定位置,将末端执行器移动至其顶部与参照块接触。
20、进一步地,上述方法还包含以下步骤:
21、移动所述刻度杆,直至其中一根刻度杆与末端执行器的一侧接触;
22、向未接触刻度杆一侧移动末端执行器以靠近对称轴线位置,再次推动刻度杆使两根刻度杆分别与末端执行器的两侧接触
23、本实用新型提出的机械手定位装置提高了末端执行器的示教效率和精度。
技术特征:
1.一种机械手定位装置,其特征在于,包括:
2.如权利要求1所述的机械手定位装置,其特征在于,所述安装板(1)上开设有供所述刻度杆(16)穿过的孔(19)。
3.如权利要求1所述的机械手定位装置,其特征在于,所述滑槽(18)的侧边设置有第一刻度(181)。
4.如权利要求1所述的机械手定位装置,其特征在于,所述安装板(1)背面设置有导轨(15),导轨(15)上滑动连接有两个滑块(151),两个所述连接件(14)分别与两个滑块(151)连接。
5.如权利要求4所述的机械手定位装置,其特征在于,所述导轨(15)平行所述同步带(13)设置。
6.如权利要求1所述的机械手定位装置,其特征在于,所述参照块(17)表面设置有第二刻度。
7.如权利要求1所述的机械手定位装置,其特征在于,所述刻度杆(16)表面设置有第三刻度。
技术总结
本技术涉及一种机械手定位装置,包括:安装板,其背面设置有定位组件;同步对中组件,包括设置在所述安装板背面的两个同步带惰轮、绕设在所述两个带惰轮之间的同步带、两个连接件;两个所述连接件分别连接所述同步带移动方向相反的第一侧和第二侧;两根刻度杆,两根刻度杆的第一端分别与两个所述连接件连接,第二端穿过安装板并延伸至其正面且高于正面;参照组件,包括设置在所述安装板正面的滑槽以及与滑槽滑动连接的参照块,所述参照块高于所述安装板正面;两根所述刻度杆分别位于所述滑槽的两侧,相对所述滑槽呈轴对称设置。本技术提出的机械手定位装置和方法提高了末端执行器的示教效率和精度。
技术研发人员:王周杰,张明辉,权汉钊
受保护的技术使用者:乐孜芯创半导体设备(上海)有限公司
技术研发日:20230531
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!