送餐机器人的制作方法
本技术涉及智能制造,特别是涉及一种送餐机器人。
背景技术:
1、随着智能制造技术领域的不断发展,餐饮行业越来越多的投入使用送餐机器人。相关技术中,送餐机器人的手臂上常承托有托盘,以用于放置餐品。但放置于托盘上的餐品直接暴露在外部环境中,在机器人移动的途中,容易出现外界灰尘异物掉落在餐品上,影响到餐品的存放安全性。
技术实现思路
1、鉴于上述问题,本实用新型的目的在于提供了一种送餐机器人,旨在改善餐品的存放安全性。
2、为改善上述问题,本实用新型所采用的技术方案如下:
3、一种送餐机器人,包括:箱体、主动轮组件、从动轮组件、盖板、连杆、托板以及驱动装置;所述箱体内设有收容腔,所述收容腔带有开口;主动轮组件安装于所述箱体的底部,所述主动轮组件被配置为对所述箱体产生驱动力,以使所述箱体避开障碍物进行转向和移动;从动轮组件安装于所述箱体的底部,所述从动轮组件与所述主动轮组件共同支撑所述箱体;盖板可转动连接于所述箱体;连杆的一端铰接于所述盖板,托板设置于所述收容腔内,并与所述连杆的另一端可转动连接,所述托板用于放置食物或者饮品;
4、驱动装置,设置于所述箱体内,并于所述托板连接,用于驱动所述托板在所述收容腔内上下移动,并且所述盖板随着所述托板的上下移动,打开或关闭所述开口。
5、可选地,所述送餐机器人还包括导向机构,所述导向机构固定连接于所述箱体,并与所述托板连接固定,所述导向机构被配置为对所述托板的运动进行导向。
6、可选地,所述导向机构包括导轨和滑块,所述导轨固定连接于所述箱体,所述导轨的侧壁设有卡槽;
7、所述滑块与所述托板连接固定,所述滑块具有卡接部,所述卡接部卡持于所述卡槽内,以使得所述滑块可沿于所述卡槽的延伸方向滑动。
8、可选地,所述导向机构的数量为两个,两个所述导向机构分别连接于所述托板一端的左右两侧,所述驱动装置连接于所述托板的另一端。
9、可选地,两个所述连杆的一端分别连接于所述盖板另一端的左右两侧,两个所述连杆的另一端分别连接于所述托板的两侧边。
10、可选地,所述驱动件为直线模组。
11、可选地,所述主动轮组件包括第一驱动轮和第二驱动轮,所述第一驱动轮安装于所述箱体沿宽度方向的一端,所述第二驱动轮安装于所述箱体沿宽度方向的另一端,所述第一驱动轮和所述第二驱动轮被配置为对所述箱体分别产生驱动力,以使所述箱体避开障碍物进行转向和移动。
12、可选地,所述送餐机器人还包括悬挂组件,所述第一驱动轮和所述第二驱动轮均通过所述悬挂组件与所述箱体连接固定。
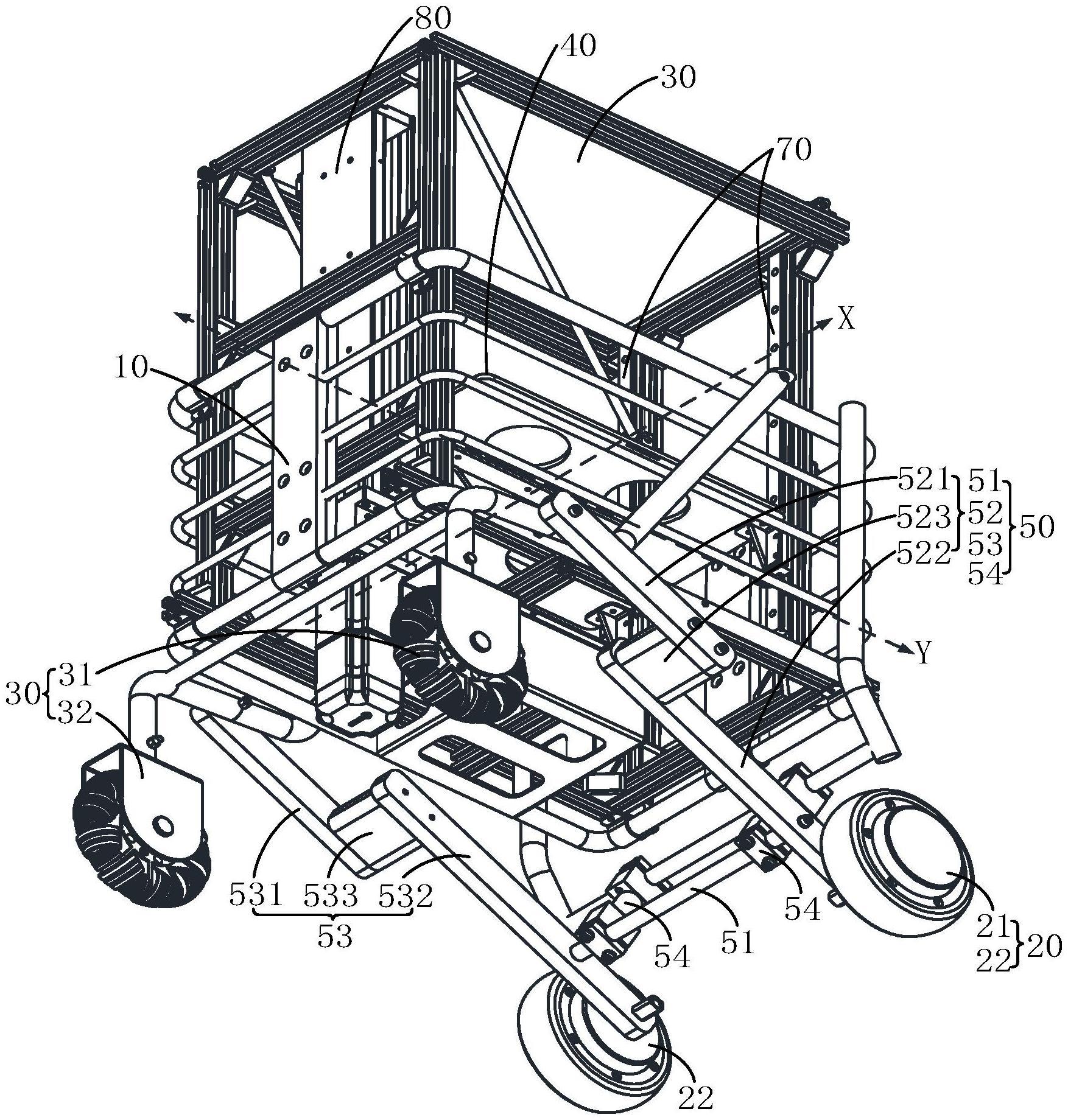
13、可选地,所述悬挂组件包括悬挂连杆、第一支撑机构、第二支撑机构以及避震器,所述第一驱动轮通过所述第一支撑机构固定连接于所述悬挂连杆的一端,所述第二驱动轮通过所述第二支撑机构固定连接于所述悬挂连杆的另一端,所述避震器分别与所述悬挂组件以及所述箱体连接固定。
14、可选地,所述第一支撑机构包括第一摆臂、第二摆臂以及第一连接块,所述第一摆臂的一端固定连接于所述箱体,所述第一摆臂的另一端通过所述第一连接块与所述第二摆臂连接固定,所述第一驱动轮固定连接于所述第二摆臂远离所述第一连接块的一端;
15、所述第二支撑机构包括第三摆臂、第四摆臂以及第二连接块,所述第三摆臂的一端固定连接于所述箱体,所述第三摆臂的另一端通过所述第二连接块与所述第四摆臂连接固定,所述第二驱动轮固定连接于所述第四摆臂远离所述第二连接块的一端;
16、所述悬挂连杆分别连接固定于所述第二摆臂以及所述第四摆臂,所述避震器分别与所述悬挂连杆以及所述箱体连接固定。
17、可选地,所述从动轮组件包括第一万向轮和第二万向轮,所述第一万向轮安装于所述箱体底部沿宽度方向的一端,所述第一万向轮、所述第一驱动轮以及所述第一连接块均位于第一平面;
18、所述第二万向轮安装于所述箱体沿宽度方向的另一端,所述第二万向轮、所述第二驱动轮以及所述第二连接块均位于第二平面,所述第二平面与所述第一平面相互平行。
19、本实用新型实施例的有益效果是:一方面,本实用新型实施例的盖板和箱体共同围合成可以开闭的包围空间,并将承托板置于封闭的包围空间内,从而对派送途中的餐品进行保护,进而能够提升送餐机器人内餐品的存放安全性;另一方面,盖板与托板的可联动连接,使得打开或关闭盖板,托板即可从收容腔内抬起或降下,提升了用户取放餐品的便利性。
技术特征:
1.一种送餐机器人,其特征在于,包括:
2.根据权利要求1所述的送餐机器人,其特征在于,所述送餐机器人还包括导向机构,所述导向机构沿竖直方向固定安装于所述箱体内,并与所述托板连接,所述导向机构被配置为对所述托板的运动进行导向。
3.根据权利要求2所述的送餐机器人,其特征在于,所述导向机构包括导轨和滑块,所述导轨固定安装于所述箱体内,所述导轨的侧壁设有卡槽;
4.根据权利要求3所述的送餐机器人,其特征在于,
5.根据权利要求1-4中任意一项所述的送餐机器人,其特征在于,所述连杆的数量为两个,两个所述连杆的一端分别连接于所述盖板另一端的左右两侧,两个所述连杆的另一端分别连接于所述托板的两侧边。
6.根据权利要求5所述的送餐机器人,其特征在于,所述驱动装置为直线模组。
7.根据权利要求1-4中任意一项所述的送餐机器人,其特征在于,所述主动轮组件包括第一驱动轮和第二驱动轮,所述第一驱动轮安装于所述箱体沿宽度方向的一端,所述第二驱动轮安装于所述箱体沿宽度方向的另一端,所述第一驱动轮和所述第二驱动轮被配置为对所述箱体分别产生驱动力,以使所述箱体避开障碍物进行转向和移动。
8.根据权利要求7所述的送餐机器人,其特征在于,所述送餐机器人还包括悬挂组件,所述第一驱动轮和所述第二驱动轮均通过所述悬挂组件与所述箱体连接固定。
9.根据权利要求8所述的送餐机器人,其特征在于,所述悬挂组件包括悬挂连杆、第一支撑机构、第二支撑机构以及避震器,所述第一驱动轮通过所述第一支撑机构固定连接于所述悬挂连杆的一端,所述第二驱动轮通过所述第二支撑机构固定连接于所述悬挂连杆的另一端,所述避震器分别与所述悬挂组件以及所述箱体连接固定。
10.根据权利要求9所述的送餐机器人,其特征在于,所述第一支撑机构包括第一摆臂、第二摆臂以及第一连接块,所述第一摆臂的一端固定连接于所述箱体,所述第一摆臂的另一端通过所述第一连接块与所述第二摆臂连接固定,所述第一驱动轮固定连接于所述第二摆臂远离所述第一连接块的一端;
11.根据权利要求10所述的送餐机器人,其特征在于,所述从动轮组件包括第一万向轮和第二万向轮,所述第一万向轮安装于所述箱体底部沿宽度方向的一端,所述第一万向轮、所述第一驱动轮以及所述第一连接块均位于第一平面;
技术总结
本技术涉及智能制造技术领域,公开了一种送餐机器人,包括:箱体、主动轮组件、从动轮组件、盖板、连杆、托板以及驱动装置;箱体内设有收容腔,收容腔带有开口;主动轮组件和从动轮组件均安装于箱体的底部,从动轮组件与主动轮组件共同支撑箱体,主动轮组件被配置为对箱体产生驱动力,以使箱体避开障碍物进行转向和移动;盖板可转动连接于箱体;连杆的一端铰接于盖板,托板设置于收容腔内,并与连杆的另一端可转动连接,托板用于放置食物或者饮品;驱动装置设置于箱体内,并于托板连接,用于驱动托板在收容腔内上下移动,并且盖板随着托板的上下移动,打开或关闭开口。通过上述方式,本技术能够提升送餐机器人内餐品的存放安全性。
技术研发人员:罗健文,吴卓钊,江俊杰,刘明,王鲁佳
受保护的技术使用者:深圳一清创新科技有限公司
技术研发日:20230531
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!