一种关节模组及机械臂的制作方法
本技术属于机器人,具体涉及一种关节模组及机械臂。
背景技术:
1、根据功能和应用场景的不同,机械臂被划分为协作机械臂和工业机械臂。协作机械臂的关节模组通常包括低压中空电机和中空谐波减速机,通过控制器控制低压中空电机运行以产生力矩,再由中空谐波减速机对力矩进行减速、放大后输出。谐波减速机的刚性较差,其中的柔轮在高强度冲击下极易损坏,进而导致谐波减速机失效,因此协作机器人在大负载、大冲击等恶劣工况下的使用寿命不理想,且位置精度不佳。工业机械臂包括高压电机和行星摆线减速机,其可以承受大扭矩、高转速和高刚性输出,但其存在的问题是,由于工业机械臂输出的力矩较大,因此在人机协作时若发生碰撞,将对会人造成较大的伤害。
技术实现思路
1、本实用新型的目的在于提供一种关节模组及机械臂,旨在改善关节模组性能,且在人机协作过程中降低碰撞对人的伤害,提高使用安全性。
2、为实现上述目的,本实用新型提供了一种关节模组,包括:
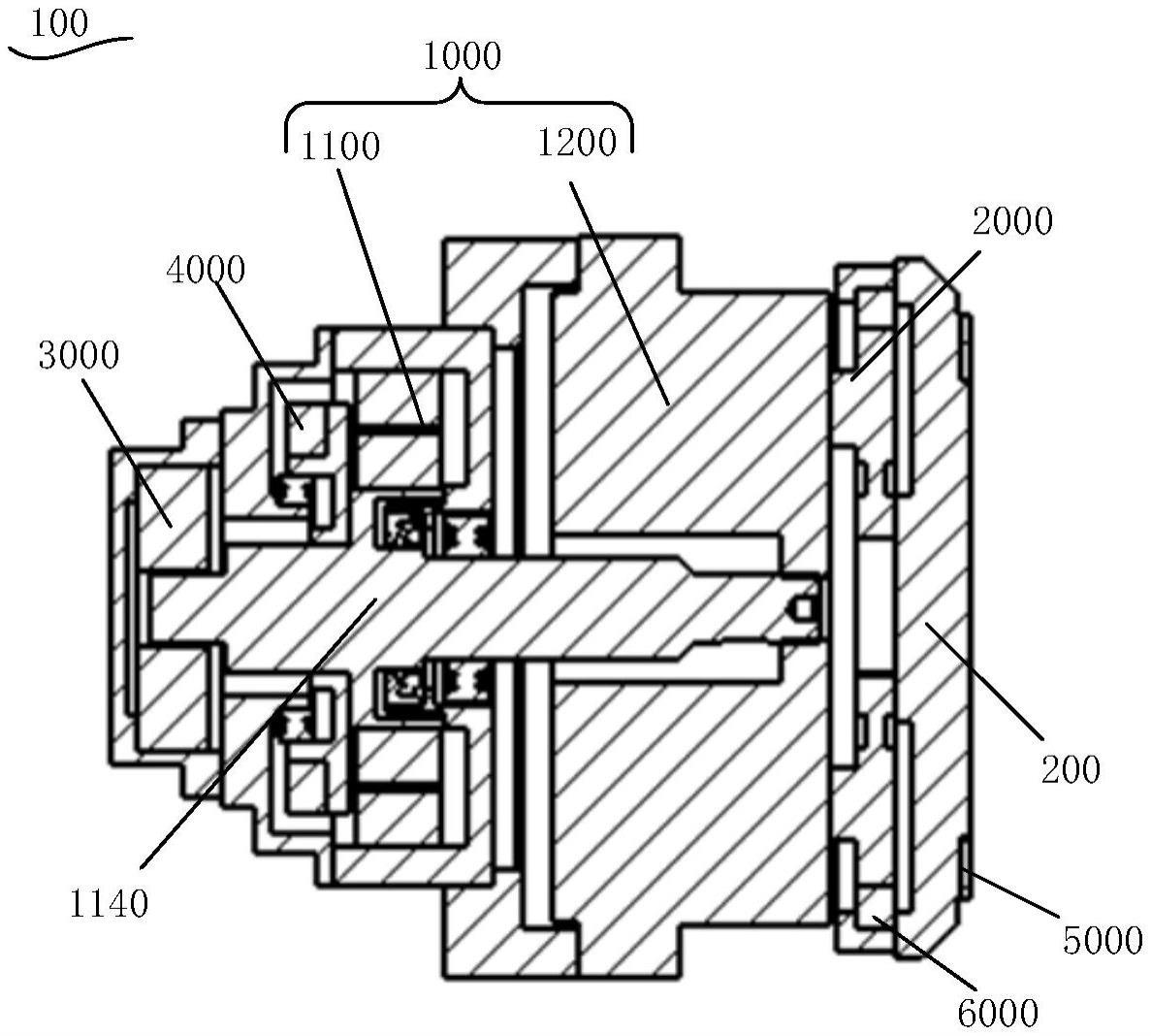
3、动力装置,包括电机和减速机,所述减速机包括行星摆线减速机构,所述行星摆线减速机构与所述电机传动连接,且所述行星摆线减速机构的输出部与目标物连接;
4、力矩监测单元,设置在所述行星摆线减速机构的输出部与所述目标物之间,并用于监测所述目标物受到的外部力矩;以及,
5、制动装置,用于在所述力矩监测单元所监测到的外部力矩发生突变时对所述电机进行制动。
6、可选地,所述关节模组还包括第一编码器和第二编码器;所述第一编码器包括第一磁环,所述第一磁环设置在所述电机的输出轴上并随所述电机的输出轴同步旋转,以使得所述第一编码器监测所述电机的输出轴的转速;所述第二编码器用于监测所述目标物的位置和转速。
7、可选地,所述第二编码器包括第二磁环,所述第二磁环设置在所述目标物上,并随目标物同步旋转。
8、可选地,所述行星摆线减速机构包括行星齿轮;所述动力装置还包括第一齿轮,所述第一齿轮套设在所述电机的输出轴上,并与所述电机的输出轴保持相对静止;所述第一齿轮与所述行星齿轮啮合。
9、可选地,所述行星摆线减速机构包括行星齿轮;所述减速机包括传动部,所述传动部包括传动轴、第二齿轮和第三齿轮,所述第二齿轮和所述第三齿轮均套设在所述传动轴上,并与所述传动轴保持相对静止,所述第三齿轮与所述行星齿轮啮合;所述动力装置还包括第一齿轮,所述第一齿轮套设在所述电机的输出轴上,并与所述电机的输出轴保持相对静止,所述第一齿轮与所述第二齿轮啮合。
10、可选地,所述第二编码器包括第二磁环,所述第二磁环设置在所述传动轴上,以使得所述第二编码器监测所述传动轴的位置和速度,进而监测所述目标物的位置和速度。
11、可选地,所述力矩监测单元包括第一接合环、第二接合环和应变片,所述第一接合环同轴地环绕在所述第二接合环的外侧,所述应变片设置在所述第一接合环和所述第二接合环之间,并连接所述第一接合环和所述第二接合环;所述第一接合环与所述行星摆线减速机构的输出部连接,所述第二接合环与所述目标物连接。
12、可选地,所述关节模组还包括轴承,所述轴承的内圈与所述第一接合环连接,所述轴承的外圈与所述目标物连接。
13、可选地,所述行星摆线减速机构具有输入轴;所述制动装置包括碟片组件、摩擦片和对接头,所述碟片组件包括两个碟片,两个所述碟片相对且间隔地布置;所述碟片组件上设有连接孔,所述连接孔至少贯穿靠近所述行星摆线减速机构的输入轴的所述碟片;所述摩擦片部分地位于两个所述碟片之间,且所述摩擦片上设有与所述连接孔连通的对接口;所述对接头设置在所述行星摆线减速机构的输入轴上,所述对接头插入所述对接口,并被配置为与所述摩擦片保持周向相对静止;
14、当所述制动装置与一电源连通时,两个所述碟片之间的间隙大于所述摩擦片的厚度,以允许所述摩擦片自转,当所述制动装置与所述电源断开连接时,两个所述碟片沿相互靠近的方向移动,并夹持所述摩擦片,以阻止所述摩擦片自转。
15、为实现上述目的,本实用新型还提供了一种机械臂,包括如前所述的关节模组,所述关节模组设置在所述机械臂的关节部位。
16、与现有技术相比,本实用新型的关节模组及机械臂具有如下优点:
17、前述的关节模组包括动力装置、力矩监测单元机制动装置,所述动力装置拗口电机和减速机;所述减速机包括行星摆线减速机构,所述行星摆线减速机构与所述电机传动连接,且所述行星摆线减速机构的输出部与目标物连接;所述力矩监测单元设置在所述行星摆线减速机构的输出部与所述目标物之间,并用于监测所述目标物受到的外部力矩;所述制动装置用于在所述力矩监测单元所监测到的外部力矩发生突变时对所述电机进行制动。采用行星摆线减速机构可以提高减速机的刚性,改善关节模组的性能。此外,所述关节力矩被设置在机械臂的关节处,于此情形下,所述行星摆线减速机构的输出部可直接或间接地与机械臂的连杆连接,也即,连杆构成所述目标物。那么在人机协作过程中,若机械臂与人发生碰撞,在碰撞发生的瞬间连杆所受到的外部力矩将发生突变,因此利用所述力矩监测单元来监测所述目标物所受到的力矩,就可以判断机械臂是否与外部的人或物发生碰撞,若判定发生碰撞,则立即利用制动装置对电机机进行制动,使得机械臂停止运动,降低对人或物的伤害。
技术特征:
1.一种关节模组,其特征在于,包括:
2.根据权利要求1所述的关节模组,其特征在于,所述关节模组还包括第一编码器和第二编码器;所述第一编码器包括第一磁环,所述第一磁环设置在所述电机的输出轴上并随所述电机的输出轴同步旋转,以使得所述第一编码器监测所述电机的输出轴的转速;所述第二编码器用于监测所述目标物的位置和转速。
3.根据权利要求2所述的关节模组,其特征在于,所述第二编码器包括第二磁环,所述第二磁环设置在所述目标物上,并随目标物同步旋转。
4.根据权利要求1至3中任一项所述的关节模组,其特征在于,所述行星摆线减速机构包括行星齿轮;所述动力装置还包括第一齿轮,所述第一齿轮套设在所述电机的输出轴上,并与所述电机的输出轴保持相对静止;所述第一齿轮与所述行星齿轮啮合。
5.根据权利要求2所述的关节模组,其特征在于,所述行星摆线减速机构包括行星齿轮;所述减速机包括传动部,所述传动部包括传动轴、第二齿轮和第三齿轮,所述第二齿轮和所述第三齿轮均套设在所述传动轴上,并与所述传动轴保持相对静止,所述第三齿轮与所述行星齿轮啮合;所述动力装置还包括第一齿轮,所述第一齿轮套设在所述电机的输出轴上,并与所述电机的输出轴保持相对静止,所述第一齿轮与所述第二齿轮啮合。
6.根据权利要求5所述的关节模组,其特征在于,所述第二编码器包括第二磁环,所述第二磁环设置在所述传动轴上,以使得所述第二编码器监测所述传动轴的位置和速度,进而监测所述目标物的位置和速度。
7.根据权利要求1所述的关节模组,其特征在于,所述力矩监测单元包括第一接合环、第二接合环和应变片,所述第一接合环同轴地环绕在所述第二接合环的外侧,所述应变片设置在所述第一接合环和所述第二接合环之间,并连接所述第一接合环和所述第二接合环;所述第一接合环与所述行星摆线减速机构的输出部连接,所述第二接合环与所述目标物连接。
8.根据权利要求7所述的关节模组,其特征在于,所述关节模组还包括轴承,所述轴承的内圈与所述第一接合环连接,所述轴承的外圈与所述目标物连接。
9.根据权利要求1所述的关节模组,其特征在于,所述行星摆线减速机构具有输入轴;所述制动装置包括碟片组件、摩擦片和对接头,所述碟片组件包括两个碟片,两个所述碟片相对且间隔地布置;所述碟片组件上设有连接孔,所述连接孔至少贯穿靠近所述行星摆线减速机构的输入轴的所述碟片;所述摩擦片部分地位于两个所述碟片之间,且所述摩擦片上设有与所述连接孔连通的对接口;所述对接头设置在所述行星摆线减速机构的输入轴上,所述对接头插入所述对接口,并被配置为与所述摩擦片保持周向相对静止;
10.一种机械臂,其特征在于,包括如权利要求1-9中任一项所述的关节模组,所述关节模组设置在所述机械臂的关节部位。
技术总结
本技术提供了一种关节模组及机械臂,关节模组包括:动力装置,包括电机和减速机,所述减速机包括行星摆线减速机构,所述行星摆线减速机构与所述电机传动连接,且所述行星摆线减速机构的输出部与目标物连接;力矩监测单元,设置在所述行星摆线减速机构的输出部与所述目标物之间,并用于监测所述目标物受到的外部力矩;以及,制动装置,用于在所述力矩监测单元所监测到的外部力矩发生突变时对所述电机进行制动。该关节模组能够承受大扭矩、高转速、高刚性的动力输出,当其应用于机械臂时,能够在机械臂发生碰撞事件时及时响应,使得机械臂停止运动,降低碰撞伤害。
技术研发人员:请求不公布姓名,请求不公布姓名,李涛,请求不公布姓名
受保护的技术使用者:苏州微创畅行机器人有限公司
技术研发日:20230605
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!