一种轮胎抓持机械手的制作方法
本技术涉及轮胎搬运设备领域,具体是一种轮胎抓持机械手。
背景技术:
1、轮胎是在各种车辆或机械上装配的接地滚动的圆环形弹性橡胶制品,通常安装在金属轮辋上,能支承车身,缓冲外界冲击,实现与路面的接触并保证车辆的行驶性能,轮胎常在复杂和苛刻的条件下使用,它在行驶时承受着各种变形、负荷、力以及高低温作用,因此必须具有较高的承载性能、牵引性能、缓冲性能,同时,还要求具备高耐磨性和耐屈挠性,以及低的滚动阻力与生热性。
2、现有的汽车轮胎胎胚智能抓取机械手(申请号:cn201610844618.5)该装置可以依据不同胎胚止口直径大小,通过festo伺服电缸驱动,箱体主轴导轨副能够在任意位置快速移动及定位,通过连杆副的角度变化,实现机械手卡爪的扩张及缩拢,它提供机械手抓取胎胚过程中的u方向轴运动;而且通过加装伸缩结构的防尘罩,有效地阻隔了胎胚上的隔离剂对卡爪上的直线导轨副一的污染和损坏,提高了机械手的使用寿命,但是现有的轮胎机械手在使用的过程中还存在以下问题:
3、上述汽车轮胎通过机械手进行夹持,由于汽车轮胎中心位置中空,使得夹持组件对汽车轮胎夹持力多大时,容易导致汽车轮胎发生形变,汽车轮胎受到形变容易弹出,导致汽车轮胎从机械手上脱离,容易造成安全隐患,因此涉及到一种轮胎抓持机械手用于现有的轮胎搬运设备领域中是很有必要的。
技术实现思路
1、为了弥补现有技术的不足,现有的汽车轮胎通过机械手进行夹持,由于汽车轮胎中心位置中空,使得夹持组件对汽车轮胎夹持力多大时,容易导致汽车轮胎发生形变,汽车轮胎受到形变容易弹出,导致汽车轮胎从机械手上脱离,容易造成安全隐患的问题,本实用新型提出一种轮胎抓持机械手。
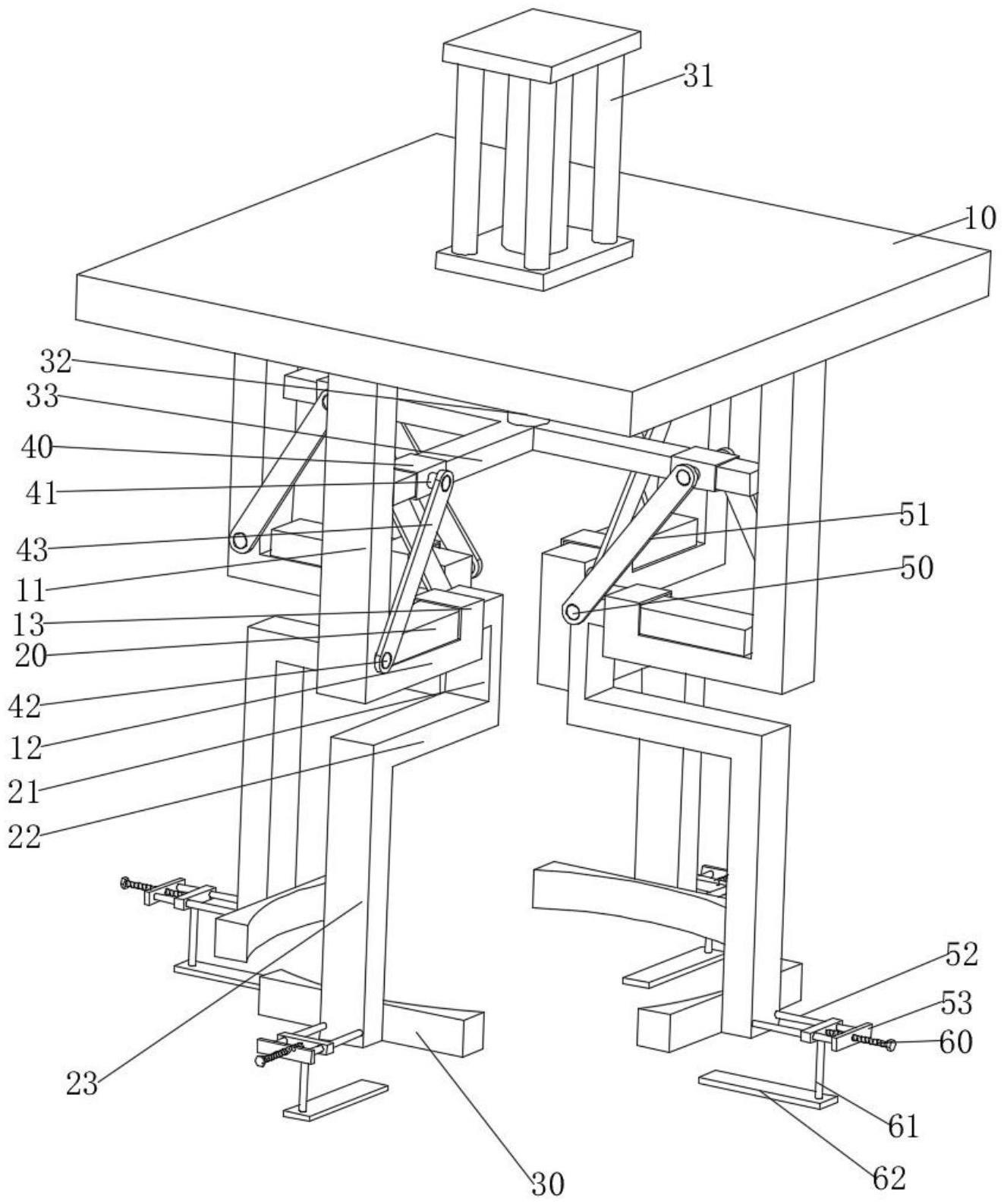
2、本实用新型解决其技术问题所采用的技术方案是:本实用新型所述一种轮胎抓持机械手,包括顶板和操作块,所述操作块的背部均对称固定装配有滑杆,两个滑杆的一端固定装配有连接板,两个滑杆上活动装配有活动块,活动块的内部均设置有转动腔,连接板上均螺纹装配有调节螺栓,调节螺栓的一端均固定装配有操作杆,操作杆的一端均活动贯穿到转动腔中,并且操作杆的一端均固定装配有转动盘,转动盘与转动腔进行活动装配,活动块的底部均固定装配有竖杆,竖杆的底部均固定装配有挡板,挡板位于操作块的下方。
3、优选的,所述顶板的底部环形固定装配有四个竖块,竖块的底部均固定装配有横块,横块的表面均固定装配有固定块,固定块均靠近横块的一端,固定块上均设置有活动口,固定块上的活动口均活动装配有牵引块,牵引块的一端均固定装配有安装块,安装块位于横块的一侧,安装块的底部均固定装配有连接块,连接块的底部均固定装配有操作块,操作块上均固定装配有夹持块。
4、优选的,所述活动口的底面和横块的表面处于同一面上。
5、优选的,所述顶板上固定装配有气缸,气缸的输出端固定装配有活塞杆,活塞杆活动贯穿顶板,并且活塞杆的底部固定装配有十字块,十字块上活动装配有四个套块。
6、优选的,所述套块的对称两侧面均固定装配有第一连接杆,竖块上均固定装配有第二连接杆,第三连接杆位于固定块的一侧,其中一个第一连接杆上活动装配有第一牵引杆,第一牵引杆的另一端与第二连接杆进行活动装配。
7、优选的,所述牵引块上均固定装配有第三连接杆,另一个第一连接杆上活动装配有第二牵引杆,第二牵引杆的另一端与第三连接杆进行活动装配。
8、本实用新型的有益之处在于:
9、本实用新型将轮胎放置在夹持块之间,对气缸进行启动,使得活塞杆带动十字块进行调节高度,让套块分别在十字块上进行移动,第三连接杆分别拽动牵引块在固定块上的活动口上进行移动,使得操作块上的夹持块对轮胎的表面进行夹持,此时在连接板上分别转动移动调节螺栓,使得转动盘在转动腔中转动,让活动块在两个滑杆上进行移动,使得竖杆带动挡板朝轮胎下方移动,对轮胎起到阻挡保护的作用,避免轮胎形变弹出。
技术特征:
1.一种轮胎抓持机械手,其特征在于:包括顶板(10)和操作块(23),所述操作块(23)的背部均对称固定装配有滑杆(52),两个滑杆(52)的一端固定装配有连接板(53),两个滑杆(52)上活动装配有活动块(70),活动块(70)的内部均设置有转动腔(71),连接板(53)上均螺纹装配有调节螺栓(60),调节螺栓(60)的一端均固定装配有操作杆(73),操作杆(73)的一端均活动贯穿到转动腔(71)中,并且操作杆(73)的一端均固定装配有转动盘(72),转动盘(72)与转动腔(71)进行活动装配,活动块(70)的底部均固定装配有竖杆(61),竖杆(61)的底部均固定装配有挡板(62),挡板(62)位于操作块(23)的下方。
2.根据权利要求1所述一种轮胎抓持机械手,其特征在于:所述顶板(10)的底部环形固定装配有四个竖块(11),竖块(11)的底部均固定装配有横块(12),横块(12)的表面均固定装配有固定块(13),固定块(13)均靠近横块(12)的一端,固定块(13)上均设置有活动口(63),固定块(13)上的活动口(63)均活动装配有牵引块(20),牵引块(20)的一端均固定装配有安装块(21),安装块(21)位于横块(12)的一侧,安装块(21)的底部均固定装配有连接块(22),连接块(22)的底部均固定装配有操作块(23),操作块(23)上均固定装配有夹持块(30)。
3.根据权利要求2所述一种轮胎抓持机械手,其特征在于:所述活动口(63)的底面和横块(12)的表面处于同一面上。
4.根据权利要求3所述一种轮胎抓持机械手,其特征在于:所述顶板(10)上固定装配有气缸(31),气缸(31)的输出端固定装配有活塞杆(32),活塞杆(32)活动贯穿顶板(10),并且活塞杆(32)的底部固定装配有十字块(33),十字块(33)上活动装配有四个套块(40)。
5.根据权利要求4所述一种轮胎抓持机械手,其特征在于:所述套块(40)的对称两侧面均固定装配有第一连接杆(41),竖块(11)上均固定装配有第二连接杆(42),第三连接杆(50)位于固定块(13)的一侧,其中一个第一连接杆(41)上活动装配有第一牵引杆(43),第一牵引杆(43)的另一端与第二连接杆(42)进行活动装配。
6.根据权利要求5所述一种轮胎抓持机械手,其特征在于:所述牵引块(20)上均固定装配有第三连接杆(50),另一个第一连接杆(41)上活动装配有第二牵引杆(51),第二牵引杆(51)的另一端与第三连接杆(50)进行活动装配。
技术总结
本技术属于轮胎搬运设备领域,具体的说是一种轮胎抓持机械手,包括顶板和操作块,操作块装配有滑杆,滑杆装配有连接板,滑杆装配有活动块,活动块设置有转动腔,连接板装配有调节螺栓,调节螺栓装配有操作杆,操作杆装配有转动盘,转动盘与转动腔装配,活动块装配有竖杆,竖杆装配有挡板,上述一种轮胎抓持机械手通过挡板和调节螺栓的配合解决了现有的汽车轮胎通过机械手进行夹持,由于汽车轮胎中心位置中空,使得夹持组件对汽车轮胎夹持力多大时,容易导致汽车轮胎发生形变,汽车轮胎受到形变容易弹出,导致汽车轮胎从机械手上脱离,容易造成安全隐患的问题。
技术研发人员:谢建凤
受保护的技术使用者:江阴市双平机械有限公司
技术研发日:20230609
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!