一种工业机器人转盘加工夹具的制作方法
本技术涉及加工夹具,尤其涉及一种工业机器人转盘加工夹具。
背景技术:
1、机械手臂是目前在机械人技术领域中得到最广泛实际,应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事以及太空探索等领域都能见到它的身影,尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业,机械臂的末端能加装的装置非常多,但目前大部分都是夹持结构。
2、现在在工业机器人中经常会使用到机械臂来对物品进行加工,搬运,在这个过程中,不断实现对机械臂及其夹持结构的更新换代,到现在机械臂的使用已经非常的广泛,其中在对货物的搬运中,因为货物的不同,有些货物的外表较为脆弱,比如纸箱等,在通过机械臂夹持时,可能会对外表造成损伤,而可能对内部的货物损坏,所以就需要一种转盘加工夹具,这种夹具在对纸箱等脆弱物品进行夹持时,可以避免在对脆弱物品,比如纸箱等进行夹持时,而对其外表造成损伤的问题。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种工业机器人转盘加工夹具。
2、为了实现上述目的,本实用新型采用了如下技术方案:一种工业机器人转盘加工夹具,包括底板,所述底板的顶端外侧固定连接有支架,所述支架的内壁等距设置有四个滑槽,所述滑槽内均滑动连接有滑块,所述滑块的向外一侧上部均固定连接在压缩弹簧的一端,所述压缩弹簧的另一端均固定连接在滑槽向外一侧的内壁,所述滑块向内一侧均设置有凹槽,所述底板的顶端中部固定连接有电动伸缩杆,所述电动伸缩杆的伸缩端固定连接有十字滑杆,所述凹槽内滑动连接有十字滑杆,所述滑块的顶端均固定连接有凸起夹爪。
3、作为上述技术方案的进一步描述:
4、所述支架的顶端等距设置于灯槽,所述灯槽的底部固定连接有电源,所述灯槽的上部固定连接有led灯。
5、作为上述技术方案的进一步描述:
6、所述电源与led灯电性连接。
7、作为上述技术方案的进一步描述:
8、所述灯槽的顶端均设置有玻璃盖。
9、作为上述技术方案的进一步描述:
10、所述底板的底端中部固定连接在电机的输出端,所述电机的底部固定连接在连接座的中部。
11、作为上述技术方案的进一步描述:
12、所述连接座的顶端外侧等距连接有若干个螺栓。
13、作为上述技术方案的进一步描述:
14、所述凸起夹爪的向内一侧表面设置有橡胶层。
15、本实用新型具有如下有益效果:
16、本实用新型中,先启动电动伸缩杆带动滑杆向上升起,滑杆在向上升起时在凹槽内滑动,将滑块向外侧推移,带动夹爪一起向外移动,对压缩弹簧进行挤压,然后进行物品的夹持,当夹持之后,在启动电动伸缩杆带动滑杆向下收缩,同时因为滑杆向下收缩时,减少了对压缩弹簧施加的压力,然后压缩弹簧对滑块进行推动,来使夹爪对箱子等进行夹持,解决了在进行夹持时,部分货物外壁较为脆弱,对箱子等物品的外表造成损伤的问题。
技术特征:
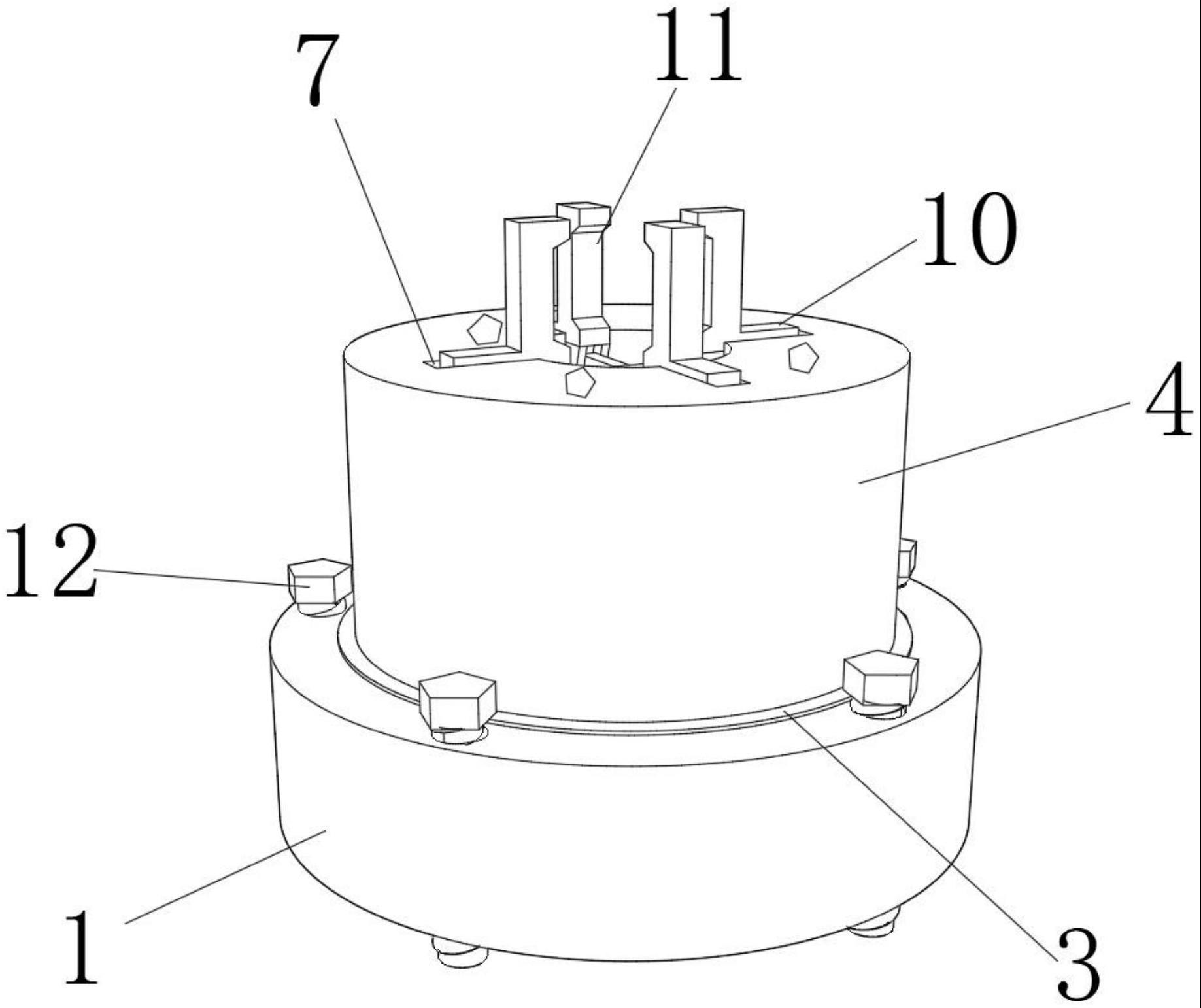
1.一种工业机器人转盘加工夹具,包括底板(3),其特征在于:所述底板(3)的顶端外侧固定连接有支架(4),所述支架(4)的内壁等距设置有四个滑槽(7),所述滑槽(7)内均滑动连接有滑块(8),所述滑块(8)的向外一侧上部均固定连接在压缩弹簧(9)的一端,所述压缩弹簧(9)的另一端均固定连接在滑槽(7)向外一侧的内壁,所述滑块(8)向内一侧均设置有凹槽(17),所述底板(3)的顶端中部固定连接有电动伸缩杆(5),所述电动伸缩杆(5)的伸缩端固定连接有十字滑杆(6),所述凹槽(17)内滑动连接有十字滑杆(6),所述滑块(8)的顶端均固定连接有凸起夹爪(10)。
2.根据权利要求1所述的一种工业机器人转盘加工夹具,其特征在于:所述支架(4)的顶端等距设置于灯槽(14),所述灯槽(14)的底部固定连接有电源(15),所述灯槽(14)的上部固定连接有led灯(16)。
3.根据权利要求2所述的一种工业机器人转盘加工夹具,其特征在于:所述电源(15)与led灯(16)电性连接。
4.根据权利要求2所述的一种工业机器人转盘加工夹具,其特征在于:所述灯槽(14)的顶端均设置有玻璃盖(13)。
5.根据权利要求1所述的一种工业机器人转盘加工夹具,其特征在于:所述底板(3)的底端中部固定连接在电机(2)的输出端,所述电机(2)的底部固定连接在连接座(1)的中部。
6.根据权利要求5所述的一种工业机器人转盘加工夹具,其特征在于:所述连接座(1)的顶端外侧等距连接有若干个螺栓(12)。
7.根据权利要求1所述的一种工业机器人转盘加工夹具,其特征在于:所述凸起夹爪(10)的向内一侧表面设置有橡胶层(11)。
技术总结
本技术涉及加工夹具技术领域,公开了一种工业机器人转盘加工夹具,包括底板,所述底板的顶端外侧固定连接有支架,所述支架的内壁等距设置有滑槽,所述滑槽内均滑动连接有滑块,所述滑块的向外一侧上部均固定连接在压缩弹簧的一端,所述压缩弹簧的另一端均固定连接在滑槽向外一侧的内壁,所述滑块向内一侧均设置有凹槽,所述底板的顶端中部固定连接有电动伸缩杆,所述电动伸缩杆的伸缩端固定连接有十字滑杆,所述凹槽内滑动连接有十字滑杆。本技术中,通过夹持爪对物品进行夹持,同时通过凸起夹爪顶部的凸起来防止因为物品下滑,而避免使用更大的力进行夹持时,对物品造成损伤。
技术研发人员:高晓
受保护的技术使用者:常熟市淼泉铸造有限公司
技术研发日:20230609
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!