一种外骨骼机器人膝关节离合器的制作方法
本技术涉及外骨骼机器人,具体涉及一种用于外骨骼机器人的膝关节离合器。
背景技术:
1、目前市面上的外骨骼机器人,在膝关节处都是依赖多个旋转电机工作,或采用屈伸电机与旋转电机配合工作,从而达到外骨骼机器人的膝关节能与人体膝关节动作相近的目的。
2、这样的结构虽然也能很好地模仿人的膝关节工作,但是,控制复杂,控制精度存在着累计误差,而且耗能高,同等容量的电池续航能力差。
技术实现思路
1、针对现有技术的不足,本实用新型旨在提供一种外骨骼机器人膝关节离合器。
2、为了实现上述目的,本实用新型采用如下技术方案:
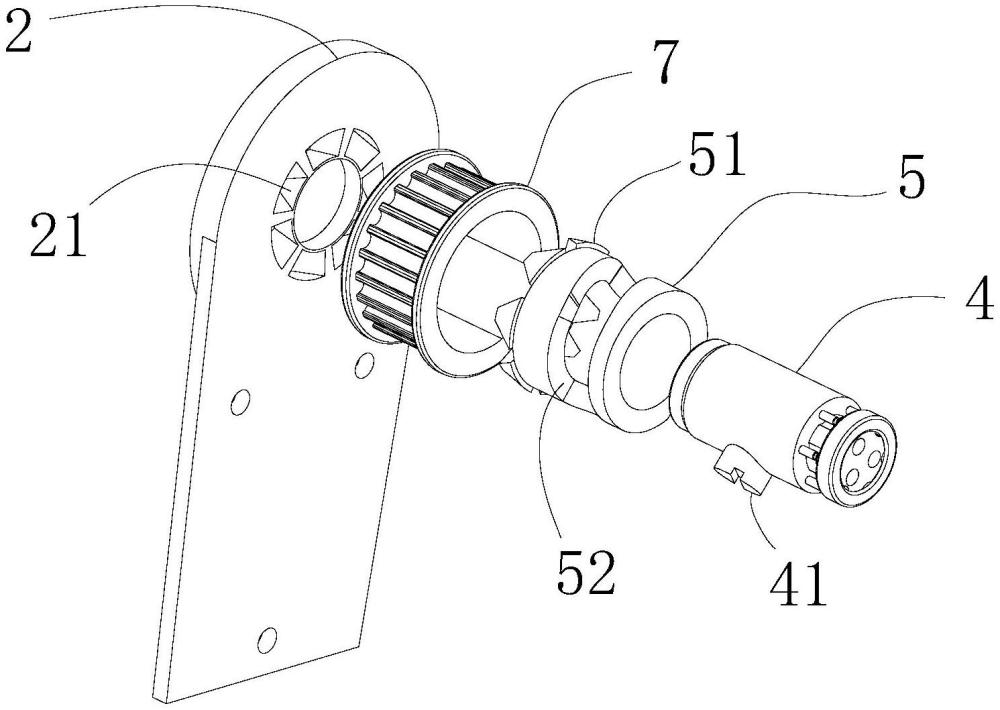
3、一种外骨骼机器人膝关节离合器,包括牙嵌离合器从动体、凸轮随动器、牙嵌离合器主动体和传动轮;
4、牙嵌离合器主动体和传动轮之间同轴传动连接,牙嵌离合器主动体和牙嵌离合器从动体相对的端面分别设有相匹配的牙结构;所述传动轮传动连接于步进电机;
5、所述牙嵌离合器主动体呈圆柱凸轮结构,其侧表面设有曲线沟槽,牙嵌离合器主动体和凸轮随动器同轴套接并可相对凸轮随动器转动,凸轮随动器上的凸柱和牙嵌离合器主动体的曲线沟槽相配合;牙嵌离合器主动体转动时,凸轮随动器的凸柱可通过沿牙嵌离合器主动体的曲线沟槽移动推动牙嵌离合器主动体沿凸轮随动器轴向移动,从而使牙嵌离合器主动体和牙嵌离合器从动体的牙结构分离或咬合。
6、进一步地,所述牙嵌离合器从动体和凸轮随动器均与外骨骼机器人的小腿结构的上端固定连接;外骨骼机器人的小腿结构的上端和外骨骼机器人的大腿结构的下端可转动连接,外骨骼机器人的大腿结构的上端传动连接于所述步进电机。
7、进一步地,所述步进电机同轴传动连接有主动轮,主动轮传动轮通过传动带传动连接。
8、本实用新型的有益效果在于:本实用新型的外骨骼机器人膝关节离合器通过牙嵌离合器与圆柱凸轮的有机结合,可以使得外骨骼机器人的运动轨迹更符合人体的步态运动,使得使用者更舒适。同时由于使用的步进电机功率小,而且每侧的腿结构只要一个步进电机,这样就更加节约电量,使得同等容量的电池续航能力翻倍,且控制更简单。
技术特征:
1.一种外骨骼机器人膝关节离合器,其特征在于,包括牙嵌离合器从动体、凸轮随动器、牙嵌离合器主动体和传动轮;
2.根据权利要求1所述的外骨骼机器人膝关节离合器,其特征在于,所述牙嵌离合器从动体和凸轮随动器均与外骨骼机器人的小腿结构的上端固定连接;外骨骼机器人的小腿结构的上端和外骨骼机器人的大腿结构的下端可转动连接,外骨骼机器人的大腿结构的上端传动连接于所述步进电机。
3.根据权利要求1所述的外骨骼机器人膝关节离合器,其特征在于,所述步进电机同轴传动连接有主动轮,主动轮传动轮通过传动带传动连接。
技术总结
本技术公开了一种外骨骼机器人膝关节离合器,牙嵌离合器主动体和传动轮之间同轴传动连接,牙嵌离合器主动体和牙嵌离合器从动体相对的端面分别设有相匹配的牙结构;传动轮传动连接于步进电机;牙嵌离合器主动体呈圆柱凸轮结构,其侧表面设有曲线沟槽,牙嵌离合器主动体和凸轮随动器同轴套接并可相对凸轮随动器转动,凸轮随动器上的凸柱和牙嵌离合器主动体的曲线沟槽相配合;牙嵌离合器主动体转动时,凸轮随动器的凸柱可通过沿牙嵌离合器主动体的曲线沟槽移动推动牙嵌离合器主动体沿凸轮随动器轴向移动,从而使牙嵌离合器主动体和牙嵌离合器从动体的牙结构分离或咬合。本技术使得外骨骼机器人的运动轨迹更符合人体的步态运动,且节约电量。
技术研发人员:彭学松
受保护的技术使用者:彭学松
技术研发日:20230613
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!