一种多功能柔性机械臂抓手的制作方法
本技术涉及机械臂抓手,具体为一种多功能柔性机械臂抓手。
背景技术:
1、如果机械臂抓手过于硬性,可能会导致它无法适应不同的物体形状和大小,抓取不稳定或者损坏物品。而柔性机械臂抓手可以根据物体的形状和大小进行调整,从而更好地完成抓取任务。同时,柔性的机械臂抓手也可以减少在抓取过程中对物体施加过大的力量,从而避免物品损坏。
2、根据公示的一种柔性抓手装置及机械臂(公开号:cn218313599u),上述申请中装置包括抓手本体和抓手支架,其中抓手本体是一个具有中空内腔的柔性壳体,其一端向内腔凹陷形成u形夹持部,另一端则具有连接部与抓手支架连接。抓手支架上端连接有检测传感器,用于检测夹持物品是否有效夹持。柔性壳体设有通气孔,可以与抽气组件连通以增强夹持力。
3、但是上述设备在实际使用过程中,由于仅通过控制柔性壳体内的空气来控制u型夹持部的夹持,夹持力不够,同时抽气时靠近通气孔的地方先凹陷下去,不利于夹持的稳定性;鉴于此,我们提出了一种多功能柔性机械臂抓手。
技术实现思路
1、本实用新型的目的在于提供一种多功能柔性机械臂抓手,以解决上述背景技术中提出的问题。
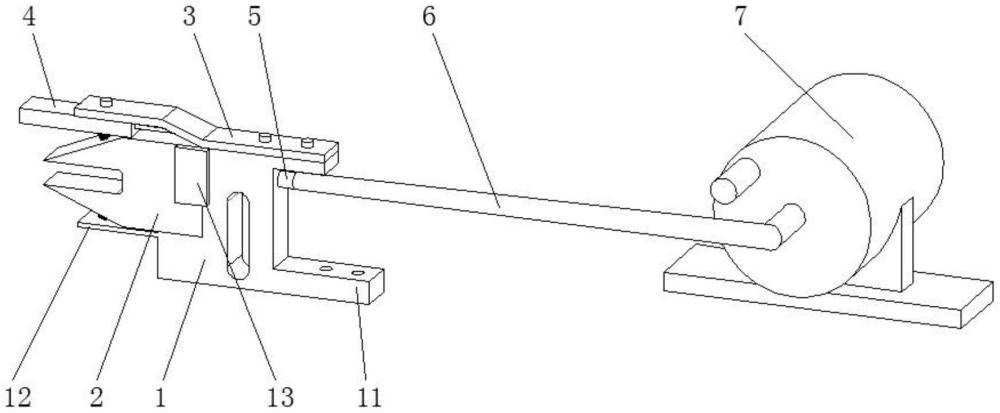
2、为实现上述目的,本实用新型提供如下技术方案:一种多功能柔性机械臂抓手,包括抓手支架,所述抓手支架的内部设置有二通气管,所述二通气管的一侧与柔性夹持部套接,所述抓手支架的顶部通过固定连接有连接板,所述连接板的底部固定连接有检测传感器,所述抓手支架的侧壁固定连接有连接块,所述连接块的顶部端面设置有辅助夹持机构,所述辅助夹持机构包括有弹簧二,所述连接块的顶部端面固定连接有弹簧二的一端,所述弹簧二的另一端抵接在柔性夹持部的底部端面,所述检测传感器的底部端面固定连接有弹簧一,所述弹簧一的另一端抵接在柔性夹持部的顶部端面,所述柔性夹持部的内壁设置有隔板,所述隔板的侧壁设置有通孔。
3、可选的,所述抓手支架的侧壁底部固定连接有固定块,可以通过螺栓将固定块与机械臂固定连接。
4、可选的,所述柔性夹持部的侧壁设置有通气孔,所述通气孔与二通气管套接,可以通过向通气孔内吸气或房企控制柔性夹持部的夹持与放松。
5、可选的,所述抓手支架的侧壁固定连接有限位板,可以防止柔性夹持部位移。
6、可选的,所述二通气管的另一侧设置有气管接头,所述气管接头与软管的一端套接,所述软管的另一端套接有抽气组件。
7、可选的,所述隔板的数量设置有两个,所述两个隔板将柔性夹持部的内部分成三个部分,且三个部分通过通孔相连,隔板可以在抽气时使柔性夹持部内部均匀收紧,从而提高夹持的稳定性。
8、与现有技术相比,本实用新型提供了一种多功能柔性机械臂抓手,具备以下有益效果:
9、1.该多功能柔性机械臂抓手,为了提高夹持力,当抽气组件开始抽气时,柔性夹持部内部的气压低于外部的气压,使柔性夹持部的中空内腔产生一定的形变,进而使柔性夹持部实现夹持的目的,弹簧一与弹簧二将柔性夹持部的夹持部位向内挤压,从而提高了夹持力。
10、2.该多功能柔性机械臂抓手,为了提高夹持的稳定性,柔性夹持部的内壁设置有隔板,隔板的侧壁设置有通孔,隔板的数量设置有两个,两个隔板将柔性夹持部的内部分成三个部分,且三个部分通过通孔相连,隔板可以在抽气时使柔性夹持部内部均匀收紧,从而提高夹持的稳定性。
技术特征:
1.一种多功能柔性机械臂抓手,包括抓手支架(1),所述抓手支架(1)的内部设置有二通气管(51),所述二通气管(51)的一侧与柔性夹持部(2)套接,所述抓手支架(1)的顶部通过固定连接有连接板(3),所述连接板(3)的底部固定连接有检测传感器(4),其特征在于:所述抓手支架(1)的侧壁固定连接有连接块(12),所述连接块(12)的顶部端面设置有辅助夹持机构,所述辅助夹持机构包括有弹簧二(9),所述连接块(12)的顶部端面固定连接有弹簧二(9)的一端,所述弹簧二(9)的另一端抵接在柔性夹持部(2)的底部端面,所述检测传感器(4)的底部端面固定连接有弹簧一(8),所述弹簧一(8)的另一端抵接在柔性夹持部(2)的顶部端面,所述柔性夹持部(2)的内壁设置有隔板(21),所述隔板(21)的侧壁设置有通孔(22)。
2.根据权利要求1所述的一种多功能柔性机械臂抓手,其特征在于:所述抓手支架(1)的侧壁底部固定连接有固定块(11)。
3.根据权利要求1所述的一种多功能柔性机械臂抓手,其特征在于:所述柔性夹持部(2)的侧壁设置有通气孔,所述通气孔与二通气管(51)套接。
4.根据权利要求1所述的一种多功能柔性机械臂抓手,其特征在于:所述抓手支架(1)的侧壁固定连接有限位板(13)。
5.根据权利要求1所述的一种多功能柔性机械臂抓手,其特征在于:所述二通气管(51)的另一侧设置有气管接头(5),所述气管接头(5)与软管(6)的一端套接,所述软管(6)的另一端套接有抽气组件(7)。
6.根据权利要求1所述的一种多功能柔性机械臂抓手,其特征在于:所述隔板(21)的数量设置有两个,所述两个隔板(21)将柔性夹持部(2)的内部分成三个部分,且三个部分通过通孔(22)相连。
技术总结
本技术涉及机械臂抓手技术领域,且公开了种多功能柔性机械臂抓手,包括抓手支架,所述抓手支架的内部设置有二通气管,所述二通气管的一侧与柔性夹持部套接,所述抓手支架的顶部通过固定连接有连接板,所述连接板的底部固定连接有检测传感器,所述抓手支架的侧壁固定连接有连接块,所述连接块的顶部端面设置有辅助夹持机构。抽气组件开始抽气时,使柔性夹持部的中空内腔产生一定的形变,进而使柔性夹持部实现夹持的目的,弹簧一与弹簧二将柔性夹持部的夹持部位向内挤压,从而提高了夹持力。柔性夹持部的内壁设置有隔板,隔板的侧壁设置有通孔,隔板可以在抽气时使柔性夹持部内部均匀收紧,从而提高夹持的稳定性。
技术研发人员:阮宏俊,钱昆,陈鑫,黄慧
受保护的技术使用者:四川绵阳鼎鑫智能装备有限公司
技术研发日:20230614
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!