一种多适应型的机器人夹爪的制作方法
本申请属于夹具,涉及一种多适应型的机器人夹爪。
背景技术:
1、随着机器人技术的飞速发展,工业用的机器人已广泛应用于各个领域,在材料的测试过程中,采用机器人抓取试件放置到测试位,能降低劳动强度,提高测试的效率。
2、例如在公开号为cn 109655356 a的发明专利申请公开了一种自动冲击试验机,在采用机器人进行试件的抓取上料,由于各种材料的试件,其尺寸大小不统一,现有机器人的夹爪无法适应,因此很难对上述试件进行有效夹持,因此需要设计一种机器人夹爪以增加其具体实用尤为重要。
技术实现思路
1、为克服相关技术中存在的问题,本申请旨在提供一种多适应型的机器人夹爪,能够对条形的试件进行有效夹持。
2、本申请是通过如下的技术方案来实现的。
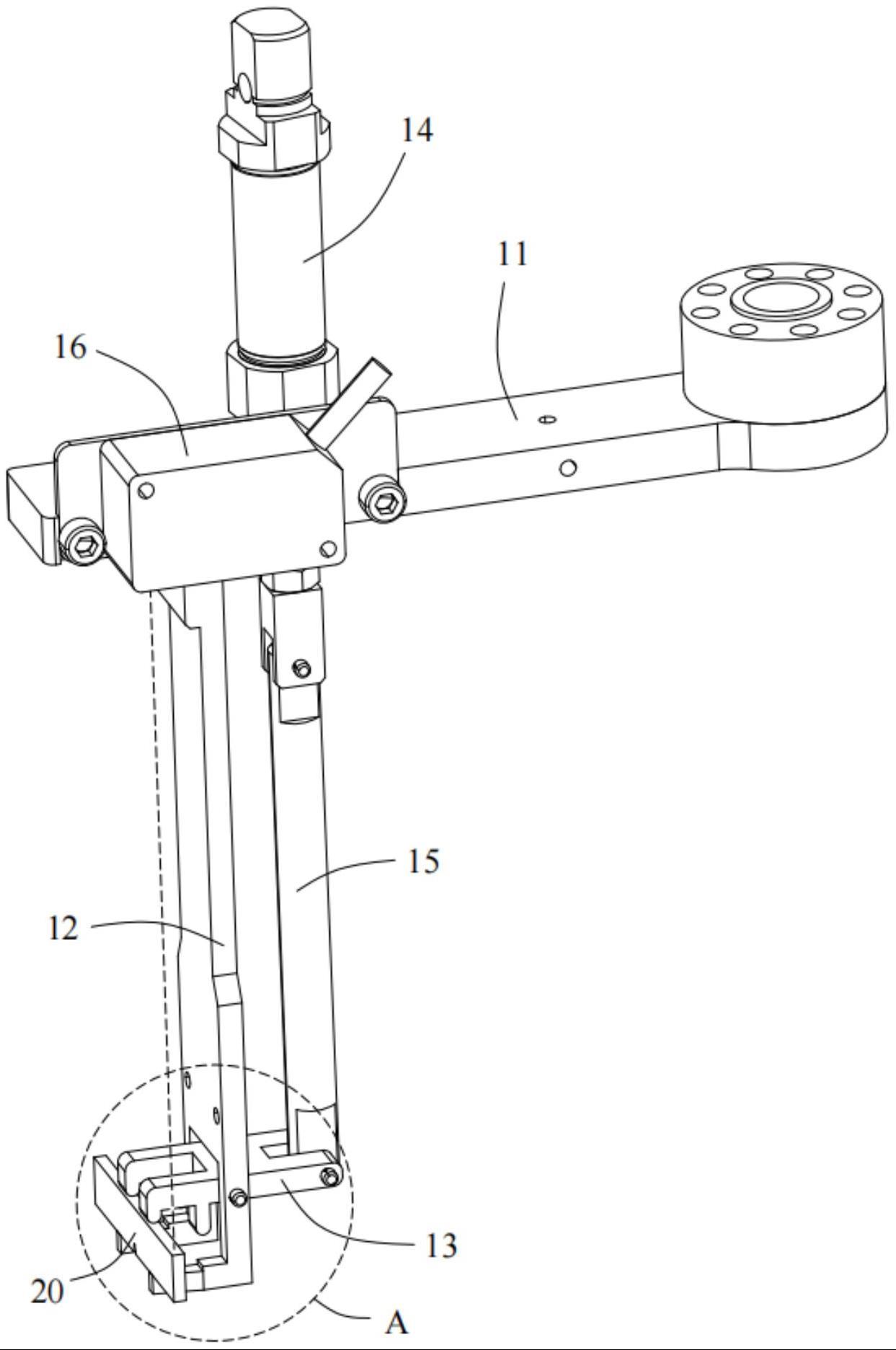
3、本技术方案是提供一种多适应型的机器人夹爪,包括用于与机器人的机械臂相连接的安装板、与所述安装板相连接的下夹臂、与所述下夹臂转动枢接的上夹臂、以及与所述下夹臂的后端连接的驱动件,所述驱动件连接在所述安装板上,所述驱动件用于驱动所述上夹臂转动;
4、所述上夹臂的前端设有两个第一支臂,所述下夹臂的前端设有两个第二支臂,在所述驱动件的作用下,所述第一支臂和所述第二支臂相配合以实现夹持试件。
5、本技术方案的技术效果是,通过两个第一支臂使上夹臂与试件有两个接触点,通过两个第二夹臂使下夹臂与试件也有两个接触点,保证了对条形的试件进行有效夹持,防止试件产生转动或偏移,对于各种尺寸大小的试件均可适应,适应性强。
6、作为上述技术方案的一个实施方式,每个所述第一支臂分别与一个所述第二支臂相对应,所述第一支臂上设有用于与试件接触的夹点。
7、作为上述技术方案的一个实施方式,所述第二支臂设有用于与试件进行面接触的接触平面,所述第一支臂的夹点设有用于与试件进行点或线接触的弧形面。
8、作为上述技术方案的一个实施方式,所述上夹臂还设有挡条,所述挡条向靠近第所述下夹臂一侧凸出延伸,所述挡条用于阻挡试件向后偏移。
9、作为上述技术方案的一个实施方式,所述夹臂还设有挡肩,所述挡肩用于阻挡试件向后偏移。
10、作为上述技术方案的一个实施方式,所述驱动件为气缸,所述气缸的驱动杆还通过连接杆与所述上夹臂连接,所述连接杆的两端分别为转动枢接连接。
11、作为上述技术方案的一个实施方式,机器人夹爪还包括有光电传感器,所述光电传感器连接在安装板上,所述光电传感器用于检测试件的有无。
12、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种多适应型的机器人夹爪,其特征在于,包括用于与机器人的机械臂相连接的安装板、与所述安装板相连接的下夹臂、与所述下夹臂转动枢接的上夹臂、以及与所述下夹臂的后端连接的驱动件,所述驱动件连接在所述安装板上,所述驱动件用于驱动所述上夹臂转动;
2.根据权利要求1所述的多适应型的机器人夹爪,其特征在于,每个所述第一支臂分别与一个所述第二支臂相对应,所述第一支臂上设有用于与试件接触的夹点。
3.根据权利要求2所述的多适应型的机器人夹爪,其特征在于,所述第二支臂设有用于与试件进行面接触的接触平面,所述第一支臂的夹点设有用于与试件进行点或线接触的弧形面。
4.根据权利要求1所述的多适应型的机器人夹爪,其特征在于,所述上夹臂还设有挡条,所述挡条向靠近第所述下夹臂一侧凸出延伸,所述挡条用于阻挡试件向后偏移。
5.根据权利要求1所述的多适应型的机器人夹爪,其特征在于,所述夹臂还设有挡肩,所述挡肩用于阻挡试件向后偏移。
6.根据权利要求1所述的多适应型的机器人夹爪,其特征在于,所述驱动件为气缸,所述气缸的驱动杆还通过连接杆与所述上夹臂连接,所述连接杆的两端分别为转动枢接连接。
7.根据权利要求1所述的多适应型的机器人夹爪,其特征在于,还包括有光电传感器,所述光电传感器连接在安装板上,所述光电传感器用于检测试件的有无。
技术总结
本申请涉及一种多适应型的机器人夹爪,包括用于与机器人的机械臂相连接的安装板、与所述安装板相连接的下夹臂、与所述下夹臂转动枢接的上夹臂、以及与所述下夹臂的后端连接的驱动件,所述驱动件连接在所述安装板上,所述驱动件用于驱动所述上夹臂转动;所述上夹臂的前端设有两个第一支臂,所述下夹臂的前端设有两个第二支臂,在所述驱动件的作用下,所述第一支臂和所述第二支臂相配合以实现夹持试件。通过两个第一支臂使上夹臂与试件有两个接触点,通过两个第二夹臂使下夹臂与试件也有两个接触点,保证了对条形的试件进行有效夹持,防止试件产生转动或偏移,对于各种尺寸大小的试件均可适应,适应性强。
技术研发人员:张艳龙,梁廷峰
受保护的技术使用者:深圳三思纵横科技股份有限公司
技术研发日:20230615
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!