执行器及机械臂的制作方法
本申请涉及机械臂,具体而言,涉及一种执行器及机械臂。
背景技术:
1、随着智能机器人技术的不断发展,机器人涉及得分领域越来越广泛,在某些领域要求机器人能够完成更多的动作,因此要求机器人有较高的自由度,例如工业机器人、医疗机器人以及仿生机器人等。
2、现有的执行器一般需要通过编码器组件来测量电机的转速,但是,在实际安装过程中,由于电机轴无法为磁铁提供稳定的安装位置,最终导致测量数据不准确。
技术实现思路
1、本申请实施例的目的在于提供一种执行器及机械臂,使得编码器组件结构稳定,测量数据准确。
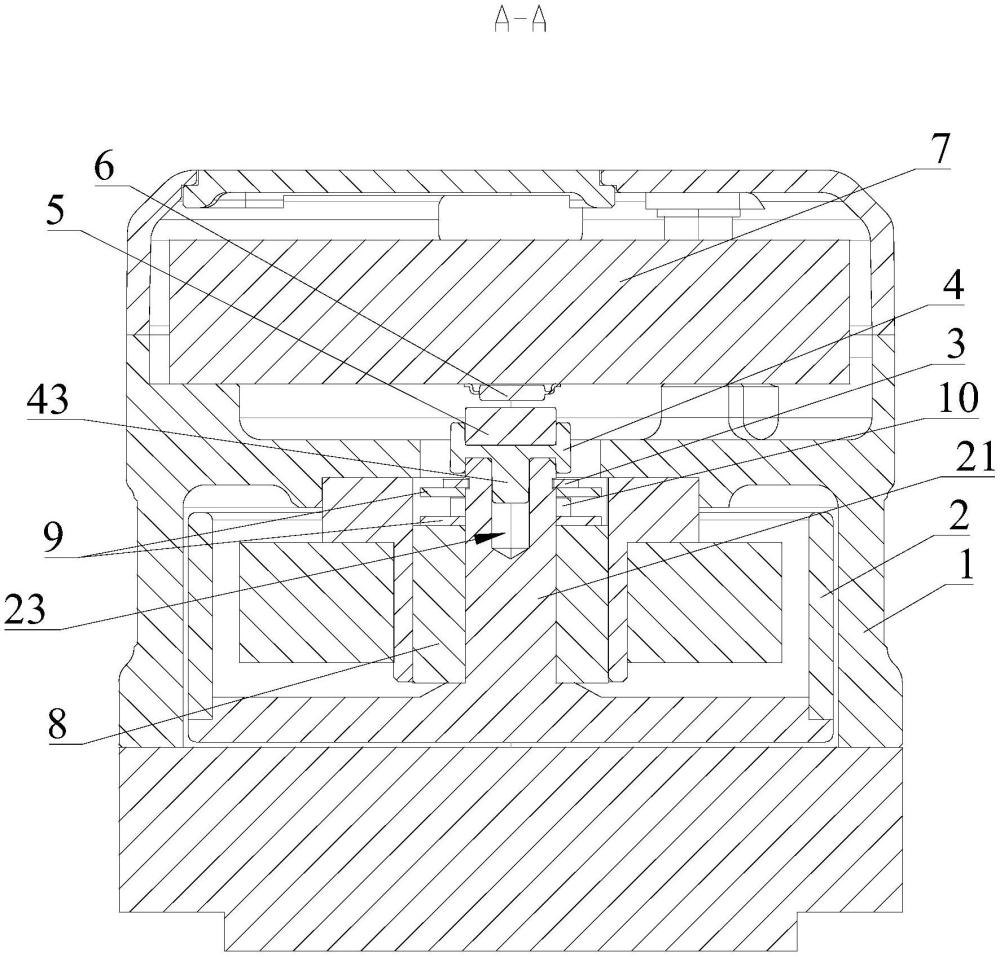
2、第一方面,本申请实施例提供了一种执行器,包括:壳体;电机,所述电机设置于所述壳体内,所述电机包括电机轴;固定件,所述固定件与所述电机轴相连;编码器组件,所述编码器组件与所述固定件连接,用于测量所述电机轴的转速。
3、在上述实现过程中,固定件与电机轴连接,编码器组件与固定件连接,固定件为编码器组件提供稳定的安装位置,避免执行器在运行过程中,编码器组件出现偏移导致测量数据不准确,使得编码器组件测量的数据更准确。
4、在一些实施例中,所述固定件包括第一安装槽,所述第一安装槽背离所述电机轴设置;
5、所述编码器组件包括磁铁和编码器,所述磁铁安装于所述第一安装槽内,所述编码器与所述磁铁相对设置。
6、在上述实现过程中,编码器固定于执行器的内部,与磁铁相对设置,固定件的一端开设有第一安装槽,磁铁通过第一安装槽与固定件连接,为磁铁提供稳定的安装位置,固定件与电机轴连接,在电机转动时,编码器通过记录磁铁转速,从而确定了电机轴的转速,提高编码器的测量精度。
7、示例性的,第一安装槽可以是环形槽,也可以为方形槽,若是方形槽,则磁铁的形状也要相对应的进行调整。
8、示例性的,将编码器与磁铁之间的距离控制在0.5mm-1mm,距离合理,编码器检测磁强效果更明显,使得编码器的检测效果更精准。
9、在一些实施例中,所述壳体内设置有电路板,所述编码器与所述电路板固定连接,并与所述磁铁的位置相对应。
10、在上述实现过程中,电路板与壳体固定连接,编码器与电路板固定连接,从而为编码器提供稳定的安装结构,提高测量精度。
11、在一些实施例中,所述固定件包括朝向所述电机轴的一侧设置的第二安装槽,所述电机轴的端部插接于所述第二安装槽。
12、在上述实现过程中,固定件的一端设置有第一安装槽,另一端设置有第二安装槽,第二安装槽与电机轴插接配合,从而实现了电机轴和磁铁分别与固定件连接,保证执行器的正常运行。
13、示例性的,第二安装槽为环形槽,与电机轴相适。
14、在一些实施例中,所述电机轴开设有安装孔,所述第二安装槽的底壁设有凸柱,所述凸柱插设于所述安装孔内。
15、在上述实现过程中,电机轴开设有安装孔,第二安装槽的底壁设有凸柱,凸柱插入至安装孔内,从而增加固定件与电机轴之间的接触面积,避免电机在转动时,固定件从电机轴的端部脱离。
16、示例性的,凸柱与固定件一体成型,凸柱朝向安装孔凸出设置,安装孔与电机轴同轴。
17、在一些实施例中,所述电机轴的外周设置有卡簧,所述卡簧与所述电机轴的端部具有第一间距;
18、所述第二安装槽的深度小于所述第一间距。
19、在上述实现过程中,卡簧与电机轴的端部具有第一间距,使得卡簧与电机轴的端部之间的距离为固定值,将第二安装槽插接于电机轴的端部,同时,第二安装槽的深度小于第一间距,避免固定件触碰到卡簧,影响执行器的使用性能。
20、示例性的,第二安装槽具有开口,第二安装槽的深度为开口到第二安装槽底壁之间的距离,固定件与电机轴插接连接,电机轴的端部与第二安装槽的底壁贴合设置。
21、在一些实施例中,所述第一安装槽的深度小于所述第二安装槽的深度。
22、在上述实现过程中,由于第一安装槽的深度小于第二安装槽的深度,磁铁的厚度为定值,因此,当磁铁安装至第一安装槽内相比于安装至第二安装槽内更能靠近编码器,距离更合理,检测效果更好。
23、在一些实施例中,所述电机轴的外周设置有限位槽,所述卡簧卡接于所述限位槽内。
24、在上述实现过程中,电机轴的外周设有一圈限位槽,卡簧卡接于限位槽内,对电机的轴向进行限位,避免电机在运行过程中,产生轴向位移。
25、在一些实施例中,所述电机轴的外周套设有轴承,所述轴承与所述卡簧之间设置有平垫组件,所述平垫组件包括两个平垫,两个所述平垫之间夹持有波形垫圈。
26、在上述实现过程中,电机轴的外周套设有轴承,在轴承与卡簧之间设置有平垫组件,平垫组件包括两个平垫,在两个平垫之间设置有波形垫圈,两个平垫用于对波形垫圈施加压缩力,使得波形垫圈产生弹性变形,提高执行器的振动耐久性。
27、第二方面,本申请实施例提供了一种机械臂,所述机械臂包括上述实施例的执行器。
28、在上述实现过程中,机器人可以应用在多个领域,如工业、医疗等,可以把任一物件或工具按空间位姿(位置和姿态)的时变要求进行移动,从而完成某一生产的作业要求,降低人力成本,提高生产力。
29、本申请的技术方案具有以下效果:
30、1、固定件与电机轴连接,编码器组件与固定件连接,固定件为编码器组件提供稳定的安装位,使得编码器组件的测量数据更准确。
31、2、电机轴的外周设有卡簧,卡簧与电机轴的端部具有第一间距,固定件通过第二安装槽与电机轴连接,同时,第二安装槽的深度小于第一间距,可以避免固定件触碰到电机轴外周的卡簧,提高执行器的安全、稳定的性能。
32、3、固定件还设置有凸柱,电机轴开设有安装孔,凸柱插入至安装孔内,从而增加固定件与电机轴的接触面积,避免固定件脱落。
技术特征:
1.一种执行器,其特征在于,包括:
2.根据权利要求1所述的执行器,其特征在于,所述固定件包括第一安装槽,所述第一安装槽背离所述电机轴设置;
3.根据权利要求2所述的执行器,其特征在于,所述壳体内设置有电路板,所述编码器与所述电路板固定连接,并与所述磁铁的位置相对应。
4.根据权利要求2或3所述的执行器,其特征在于,所述固定件包括朝向所述电机轴的一侧设置的第二安装槽,所述电机轴的端部插接于所述第二安装槽。
5.根据权利要求4所述的执行器,其特征在于,所述电机轴开设有安装孔,所述第二安装槽的底壁设有凸柱,所述凸柱插设于所述安装孔内。
6.根据权利要求5所述的执行器,其特征在于,所述电机轴的外周设置有卡簧,所述卡簧与所述电机轴的端部具有第一间距;
7.根据权利要求4所述的执行器,其特征在于,所述第一安装槽的深度小于所述第二安装槽的深度。
8.根据权利要求6所述的执行器,其特征在于,所述电机轴的外周设置有限位槽,所述卡簧卡接于所述限位槽内。
9.根据权利要求6所述的执行器,其特征在于,所述电机轴的外周套设有轴承,所述轴承与所述卡簧之间设置有平垫组件,所述平垫组件包括两个平垫,两个所述平垫之间夹持有波形垫圈卡簧。
10.一种机械臂,其特征在于,所述机械臂包括上述权利1至9任一项所述的执行器。
技术总结
本申请涉及机械臂技术领域,提供了一种执行器及机械臂,其中,执壳体;电机,电机设置于壳体内,电机包括电机轴;固定件,固定件与电机轴相连;编码器组件,编码器组件与固定件连接,用于测量电机轴的转速。通过本申请的技术方案,使得编码器组件结构稳定,测量数据准确。
技术研发人员:顾捷
受保护的技术使用者:上海傅利叶智能科技有限公司
技术研发日:20230615
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!