具有多种功能的巡诊机器人的制作方法
本技术具体涉及一种具有多种功能的巡诊机器人。
背景技术:
1、随着科技的快速进步,将更多人工智能、传感技术等高科技融入医疗行业,使医疗服务走向更智能化、更人性化、更规范化,推动医疗事业的繁荣发展。
2、为了提高医护人员的工作效率,巡诊机器人营运而生,但是现有的巡诊机器人功能单一,大多用于派送药物。
技术实现思路
1、为了解决上述技术问题,本实用新型提出了一种具有多种功能的巡诊机器人。
2、为了达到上述目的,本实用新型的技术方案如下:
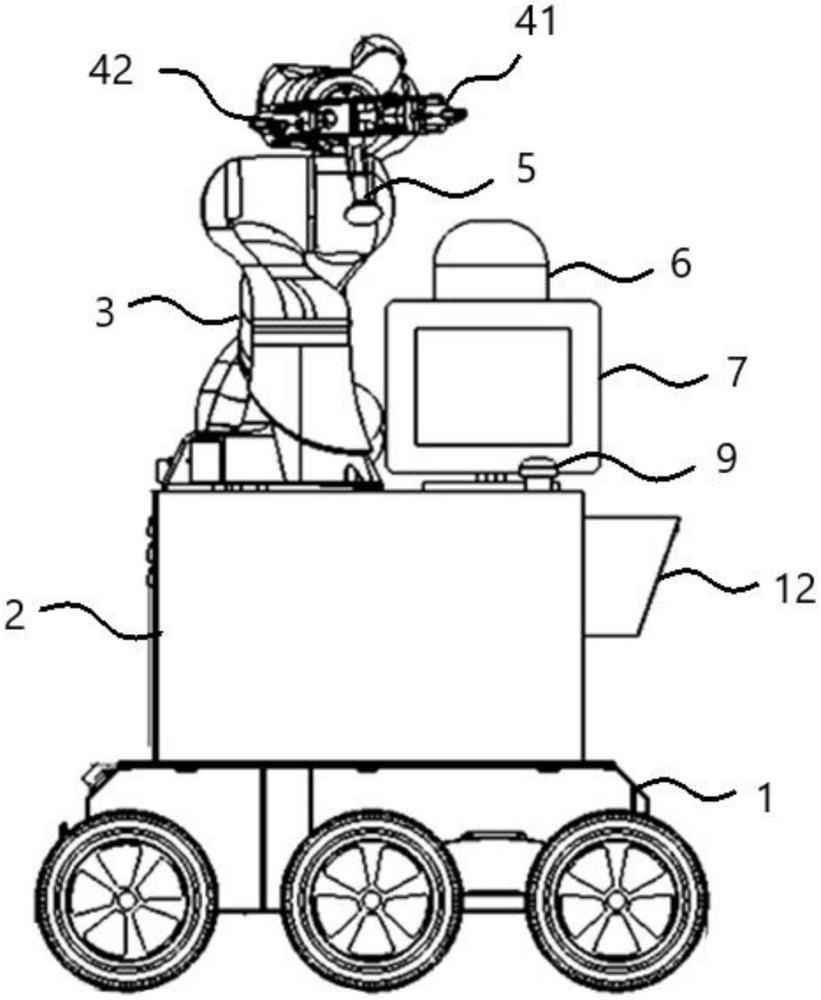
3、本实用新型具有多种功能的巡诊机器人,包括:内置有移动驱动装置的机器人移动平台、内置有控制装置的控制箱、机械臂、超声装置、听诊装置、影像采集装置、音频通话装置以及显示装置;
4、控制箱安装于机器人移动平台上,机械臂、影像采集装置、音频通话装置和显示装置安装于控制箱上,超声装置和听诊装置安装于机械臂的动作端;
5、机械臂、超声装置、听诊装置、影像采集装置、音频通话装置以及显示装置分别与控制装置电连接;
6、超声装置能够在机械臂的协作下,完成患者的超声扫查,并将超声影像通过控制装置发送至后台医生端;
7、听诊装置能够在机械臂的协作下,完成患者的听诊检查,并将听诊信号通过控制装置发送至后台医生端;
8、影像采集装置能够采集患者的影像,并将其通过控制装置发送至后台医生端;
9、音频通话装置能够通过控制装置实现患者与医生之间的通话;
10、显示装置能够显示医生的影像。
11、本实用新型公开一种具有多种功能的巡诊机器人,具有以下有益效果:
12、第一,能够实现日常病房巡查,通过影像采集装置、音频通话装置、显示装置,能够实现患者与医生“面对面”沟通交流,探查患者的病情。
13、第二,超声装置和听诊装置能够在机械臂的协作下,完成患者的超声扫查和听诊检查,并将超声影像和听诊信号发送至后台医生端,医生通过后台医生端进行操作进行反馈,实现远程超声检查和听诊检查。
14、第三,巡诊机器人能够实现多功能检查,提高医生工作效率。
15、在上述技术方案的基础上,还可做如下改进:
16、作为优选的方案,在机械臂的动作端安装有六维力传感器。
17、采用上述优选的方案,能够对机械臂的运动状态进行精准监测。
18、作为优选的方案,在机械臂的动作端安装有能够转动的回转盘,回转盘与转动驱动装置传动连接,转动驱动装置能够与控制装置电连接;
19、且超声装置和听诊装置均安装于回转盘上的不同位置。
20、采用上述优选的方案,控制装置控制回转盘转动,实现超声装置和听诊装置的转换。
21、作为优选的方案,超声装置包括:低频超声探头和高频超声探头,且低频超声探头和高频超声探头安装于回转盘上,且安装于同一平面上。
22、采用上述优选的方案,根据不同的情形,选用不同的超声探头,且低频超声探头和高频超声探头安装于回转盘上,且安装于同一平面上,通过回转盘的转动实现不同探头的切换。
23、作为优选的方案,听诊装置安装于低频超声探头和高频超声探头之间,且与低频超声探头和高频超声探头处于不同平面。
24、采用上述优选的方案,相互之间不会发生干涉。
25、作为优选的方案,机械臂和显示装置并排安装于控制箱上。
26、采用上述优选的方案,机械臂在操作时,患者可以与显示装置内显示的医生进行“面对面”沟通。
27、作为优选的方案,在控制箱上设有紧急停止按钮,紧急停止按钮与控制装置电连接。
28、采用上述优选的方案,在紧急情况下,患者或医护人员可以按下紧急停止按钮,巡诊机器人停止工作,并及时通知管理人员。
29、作为优选的方案,影像采集装置通过旋转座安装于控制箱上,旋转座与第一旋转驱动装置传动连接,第一旋转驱动装置与控制装置电连接。
30、采用上述优选的方案,控制装置控制第一旋转驱动装置带动旋转座转动,调整影像采集装置至合适的角度。
31、作为优选的方案,显示装置通过旋转平台安装于控制箱上,旋转平台与第二旋转驱动装置传动连接,第二旋转驱动装置与控制装置电连接。
32、采用上述优选的方案,控制装置控制第二旋转驱动装置带动旋转平台转动,调整显示装置至合适的角度。
33、作为优选的方案,在控制箱的侧壁上安装有置物盒。
34、采用上述优选的方案,便于医护人员及时收纳物品。
技术特征:
1.具有多种功能的巡诊机器人,其特征在于,包括:内置有移动驱动装置的机器人移动平台、内置有控制装置的控制箱、机械臂、超声装置、听诊装置、影像采集装置、音频通话装置以及显示装置;
2.根据权利要求1所述的巡诊机器人,其特征在于,在所述机械臂的动作端安装有六维力传感器。
3.根据权利要求1所述的巡诊机器人,其特征在于,所述超声装置包括:低频超声探头和高频超声探头,且所述低频超声探头和高频超声探头安装于所述回转盘上,且安装于同一平面上。
4.根据权利要求3所述的巡诊机器人,其特征在于,所述听诊装置安装于低频超声探头和高频超声探头之间,且与所述低频超声探头和高频超声探头处于不同平面。
5.根据权利要求1所述的巡诊机器人,其特征在于,所述机械臂和显示装置并排安装于所述控制箱上。
6.根据权利要求1所述的巡诊机器人,其特征在于,在所述控制箱上设有紧急停止按钮,所述紧急停止按钮与控制装置电连接。
7.根据权利要求1所述的巡诊机器人,其特征在于,所述影像采集装置通过旋转座安装于所述控制箱上,所述旋转座与第一旋转驱动装置传动连接,所述第一旋转驱动装置与控制装置电连接。
8.根据权利要求1所述的巡诊机器人,其特征在于,所述显示装置通过旋转平台安装于所述控制箱上,所述旋转平台与第二旋转驱动装置传动连接,所述第二旋转驱动装置与控制装置电连接。
9.根据权利要求1所述的巡诊机器人,其特征在于,在所述控制箱的侧壁上安装有置物盒。
技术总结
本技术公开一种具有多种功能的巡诊机器人,包括:内置有移动驱动装置的机器人移动平台、内置有控制装置的控制箱、机械臂、超声装置、听诊装置、影像采集装置、音频通话装置以及显示装置;控制箱安装于机器人移动平台上,机械臂、影像采集装置、音频通话装置和显示装置安装于控制箱上,超声装置和听诊装置安装于机械臂的动作端;机械臂、超声装置、听诊装置、影像采集装置、音频通话装置以及显示装置分别与控制装置电连接。本技术超声装置和听诊装置在机械臂的协作下,完成患者的超声扫查和听诊检查,并将超声影像和听诊信号发送至后台医生端,医生通过后台医生端进行操作进行反馈,实现远程超声检查和听诊检查,提高医生工作效率。
技术研发人员:孙富春,刘华平,宋亦旭,谢毓民
受保护的技术使用者:清春智富(苏州)高新科技有限公司
技术研发日:20230616
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!