一种船用带波浪补偿的多轴自适应海上救援机械手的制作方法
本技术涉及一种海上救援设备,尤其涉及一种船用带波浪补偿的多轴自适应海上救援机械手。
背景技术:
1、对于船舶在海上遭遇自然灾害或其他意外因素所造成的人员或者货物落海事故,目前大多采用如发射抛缆绳、抛救生圈、抛充气橡皮艇、小型救生快艇接近落海人员等方式进行救援。其中,对于发射抛缆绳、抛救生圈、抛充气橡皮艇等救援方式,难以准确的到达落海人员的位置,为了增加精确度可采用机械手抓取被救援人员与货物,但现有机械手大多是机械结构简单,不够精密,驱动轴数很少,且大部分为液压驱动或者气压驱动。
技术实现思路
1、本实用新型的目的在于提供一种船用带波浪补偿的多轴自适应海上救援机械手,从而解决现有技术中存在的前述问题。
2、一种船用带波浪补偿的多轴自适应海上救援机械手,机械手包括:旋转机构、气缸机构和机械爪机构,所述旋转机构与船体相连,所述气缸机构与所述旋转机构相连,所述气缸机构上镜像设置有两个所述机械爪机构,两个所述机械爪机构相向或相背运动以实现抓取或释放动作。
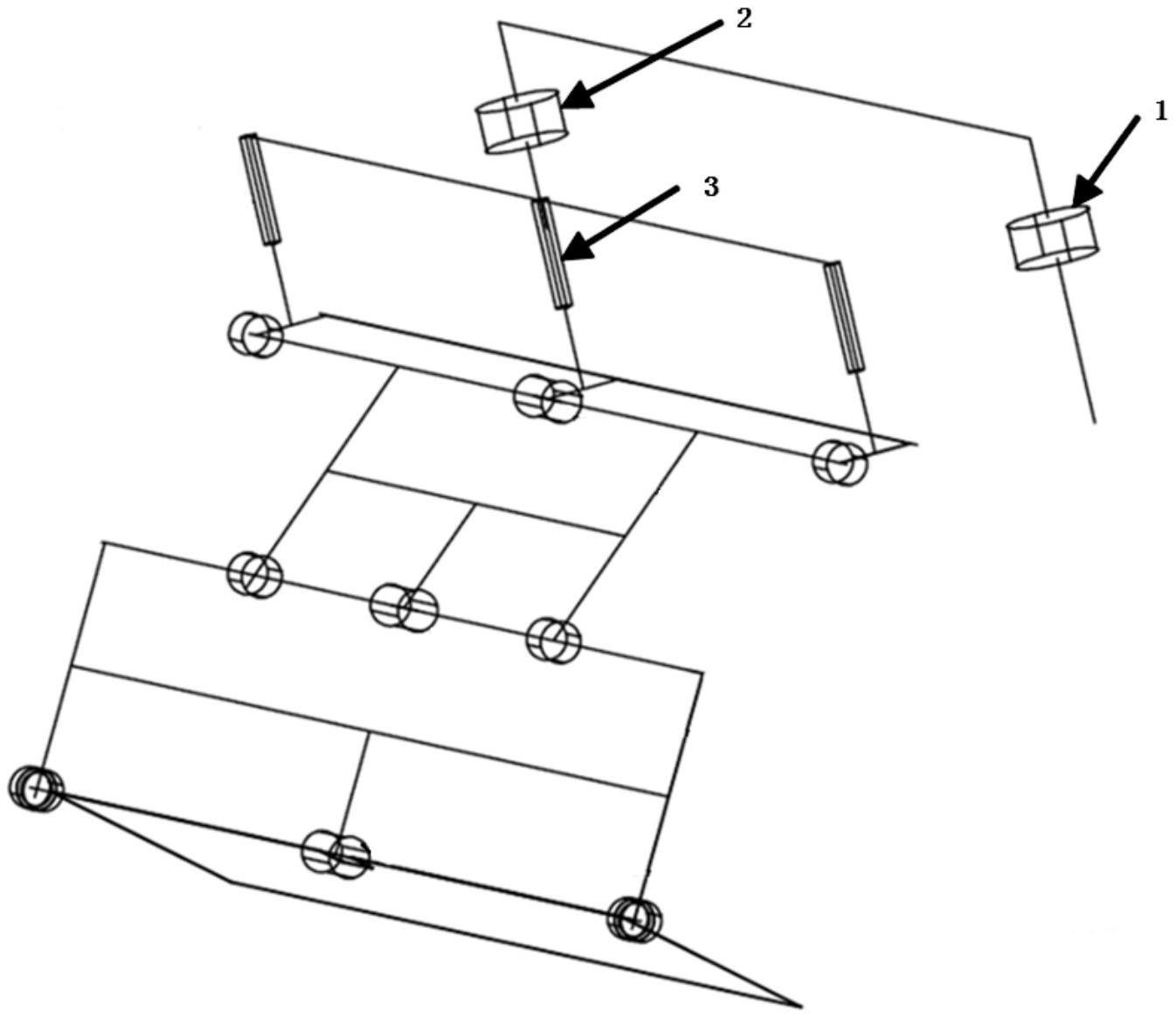
3、作为优选:所述旋转机构包括:第一旋转伺服电机(1)、与第一旋转伺服电机相连的第一伺服减速器、与所述第一旋转伺服电机(1)相连的第二旋转伺服电机(2)、与第二旋转伺服电机相连的第二伺服减速器,所述第一旋转伺服电机(1)和第一伺服减速器设置于船身内,所述第二旋转伺服电机(2)和第二伺服减速器经气缸结构与机械爪机构相连。
4、作为优选:所述气缸机构包括有气缸伺服驱动器和与气缸伺服驱动器相连的伺服气缸(3),所述伺服气缸(3)与所述旋转机构相连,所述伺服气缸(3)的伸缩端与所述机械爪机构连接。
5、作为优选:所述机械爪机构包括3个关节,所述关节依次顺序连接,连接处设置有关节伺服驱动器、关节伺服减速器和关节伺服电机,所述关节伺服驱动器与关节伺服减速器相连,所述关节伺服减速器与关节伺服电机相连;最上部的所述关节与所述气缸机构连接。
6、作为优选:机械手包括距离传感器,所述气缸机构经连接部与机械爪机构相连,所述距离传感器设置在连接部上。
7、作为优选:机械手包括压力传感器,压力传感器安装在机械爪机构的各个关节实现抓取或释放动作时与被救援物体接触一侧。
8、作为优选:在机械手上还安装有红外线传感器和视觉传感器,所述红外线传感器和所述视觉传感器均设置在连接部上。
9、作为优选:机械手还包括运动控制器,所述运动控制器与所述旋转机构、所述气缸机构、所述机械爪机构连接。
10、本实用新型的有益效果是:本实用新型提供了一种船用带波浪补偿的多轴自适应海上救援机械手,由于本机械手采用虚轴加网络等时同步的技术,同时又是全自动动作等原因可以达到救援速度快、还由于机械手配有起波浪补偿系统以及压力检测系统,所以对被救援物体不会造成二次伤害。
技术特征:
1.一种船用带波浪补偿的多轴自适应海上救援机械手,其特征在于,机械手包括:旋转机构、气缸机构和机械爪机构,所述旋转机构与船体相连,所述气缸机构与所述旋转机构相连,所述气缸机构上镜像设置有两个所述机械爪机构,两个所述机械爪机构相向或相背运动以实现抓取或释放动作。
2.如权利要求1所述一种船用带波浪补偿的多轴自适应海上救援机械手,其特征在于,所述旋转机构包括:第一旋转伺服电机(1)、与第一旋转伺服电机相连的第一伺服减速器、与所述第一旋转伺服电机(1)相连的第二旋转伺服电机(2)、与第二旋转伺服电机相连的第二伺服减速器,所述第一旋转伺服电机(1)和第一伺服减速器设置于船身内,所述第二旋转伺服电机(2)和第二伺服减速器经气缸结构与机械爪机构相连。
3.如权利要求1或2所述一种船用带波浪补偿的多轴自适应海上救援机械手,其特征在于,所述气缸机构包括有气缸伺服驱动器和与气缸伺服驱动器相连的伺服气缸(3),所述伺服气缸(3)与所述旋转机构相连,所述伺服气缸(3)的伸缩端与所述机械爪机构连接。
4.如权利要求1所述一种船用带波浪补偿的多轴自适应海上救援机械手,其特征在于,所述机械爪机构包括3个关节,所述关节依次顺序连接,连接处设置有关节伺服驱动器、关节伺服减速器和关节伺服电机,所述关节伺服驱动器与关节伺服减速器相连,所述关节伺服减速器与关节伺服电机相连;最上部的所述关节与所述气缸机构连接。
5.如权利要求1所述一种船用带波浪补偿的多轴自适应海上救援机械手,其特征在于,机械手包括距离传感器,所述气缸机构经连接部与机械爪机构相连,所述距离传感器设置在连接部上。
6.如权利要求4所述一种船用带波浪补偿的多轴自适应海上救援机械手,其特征在于,机械手包括压力传感器,压力传感器安装在机械爪机构的各个关节实现抓取或释放动作时与被救援物体接触一侧。
7.如权利要求5所述一种船用带波浪补偿的多轴自适应海上救援机械手,其特征在于,在机械手上还安装有红外线传感器和视觉传感器,所述红外线传感器和所述视觉传感器均设置在连接部上。
8.如权利要求1所述一种船用带波浪补偿的多轴自适应海上救援机械手,其特征在于,机械手还包括运动控制器,所述运动控制器与所述旋转机构、所述气缸机构、所述机械爪机构连接。
技术总结
本技术涉及一种海上救援设备,尤其涉及一种船用带波浪补偿的多轴自适应海上救援机械手,机械手包括:旋转机构、气缸机构和机械爪机构,旋转机构包括两个旋转伺服电机,一个安装在船体上,另一个经气缸机构与机械爪机构相连,气缸机构与旋转机构相连,气缸机构上镜像设置有两个机械爪机构,每个机械爪机构有3个关节,两个机械爪机构相向或相背运动以实现抓取或释放动作。在增加采用机械手抓取被救援人员与货物的精确度同时,由于采用了恒张力技术及波浪补偿技术,所以对被救援物体不会造成二次伤害。
技术研发人员:樊成
受保护的技术使用者:上海阜有海洋科技有限公司
技术研发日:20230616
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!