一种内置安全防护装置的球罐外壁作业机器人的制作方法
本技术涉及球罐机器人,尤其涉及一种内置安全防护装置的球罐外壁作业机器人。
背景技术:
1、除锈是石化罐体生产链中的一个重要环节,为了延长罐体的使用寿命,保证石化产业的安全运行,罐体必须定期进行修理。除去罐体表面钢板上的铁锈、油污、旧漆皮等,为提高喷涂质量作表面预处理。
2、目前,越来越多的爬壁机器人用于该类作业中,爬壁机器人将移动机构与吸附机构相结合,实现在垂直壁面上移动。为防护机器人意外跌落造成安全事故及设备损坏,机器人上需要安装防坠系统。防坠系统包括悬挂点、防坠器等。但球罐外壁有一些喷淋管在储罐壁面上有旋梯、旋梯遮挡部分和喷淋管、加强圈等附加设施,储罐喷淋管呈水平和竖直两种分布形式,用于储罐的降温和消防。机器人安装防坠器垂直作业时,每一次换道,防坠器都要重新挂,又比如,在有些作业场地,因条件限制可能无法安装防坠器,或者一些特种作业机器人如喷漆爬壁机器人等,因机器人的结构及作业任务相对特殊,其作业时不便在作业面上安装防坠器。
技术实现思路
1、本实用新型的主要目的在于克服现有技术中的不足,提供一种内置安全防护装置的球罐外壁作业机器人。该装置能将作业机器人牢固地吸附于球罐作业面,取代人为安装或拆卸防坠器,节省辅助作业时间,同时保证安全可靠。
2、本实用新型为实现其技术目的所采用的技术方案是:一种内置安全防护装置的球罐外壁作业机器人,包括作业机器人、重力加速度传感器和内置的安全防护装置,所述内置的安全防护装置包括有电动推缸和电磁吸附件,所述电磁吸附件内设置有激磁线圈,所述激磁线圈电性连接有激磁电路,所述激磁电路同时电性连接重力加速度传感器;所述激磁电路可将电磁吸附件内激磁线圈进行接电,使得电磁吸附件具有吸附效果。
3、所述重力加速度传感器用于采集作业机器人实时的加速度值并判断作业机器人处于正常作业状态还是跌落状态;
4、所述重力加速度传感器信号传输连接有控制器,所述重力加速度传感器控制器均安装在作业机器人上,所述控制器控制所述电动推缸进行伸缩移动,所述电动推缸带动电磁吸附件进行伸缩移动。
5、优选地,所述内置的安全防护装置为四组,分别位于所述作业机器人前后部的左右两侧,所述电动推缸一端铰接于所述作业机器人的底板上,另一端与所述电磁吸附件固定连接,通过电动推缸的设置,在控制器的作用下,能够对电磁吸附件进行伸缩移动。
6、优选地,所述重力加速度传感器检测到作业机器人处于跌落状态时,重力加速度传感器将信号传输给控制器,从而快速控制电动推缸推动电磁吸附件,同时控制激磁电路与激磁线圈电性导通,使电磁吸附件吸附于球罐外壁作业面。
7、优选地,所述重力加速度传感器检测到作业机器人处于正常作业状态时,所述激磁电路与所述激磁线圈电性断路,所述电磁吸附件内的激磁线圈失电,且在所述电动推缸的作用下使所述电磁吸附件脱离球罐作业面,回到初始位置。
8、优选地,所述的内置安全防护装置还包括有圆筒,所述圆筒顶部外壁固定在所述作业机器人的底板上,所述圆筒的内部滑动连接有滑杆,所述滑杆的一端固定安装从动电磁轮,所述从动电磁轮通过设置磁力电路与低磁模块所述控制器进行电性连接,所述低磁模块固定安装在所述控制器上;通过控制器可控制将磁力电路与从动电磁轮接通,使得从动电磁轮具有磁力,在低磁模块的作用下,使得从动电磁轮磁力较小,从而使得从动电磁轮与球罐作业面之间的磁力吸引力较小。
9、优选地,所述滑杆的顶端固定连接有限位板,所述限位板与所述圆筒的顶部内壁之间设置有减震弹簧,所述减震弹簧直接放置在圆筒的内部。
10、所述圆筒的一端固定有端口板,所述限位板被所述圆筒的端口板阻挡,使所述滑杆不会脱落所述圆筒的内部。
11、与现有技术相比,本实用新型的有益效果是:本装置提供一种内置安全防护装置的球罐外壁作业机器人,当检测到作业机器人发生打滑或其他易坠落事故时,内置安全防护装置启动,将作业机器人牢固地吸附于球罐作业面,取代人为安装或拆卸防坠器,节省辅助作业时间,同时保证安全可靠。
技术特征:
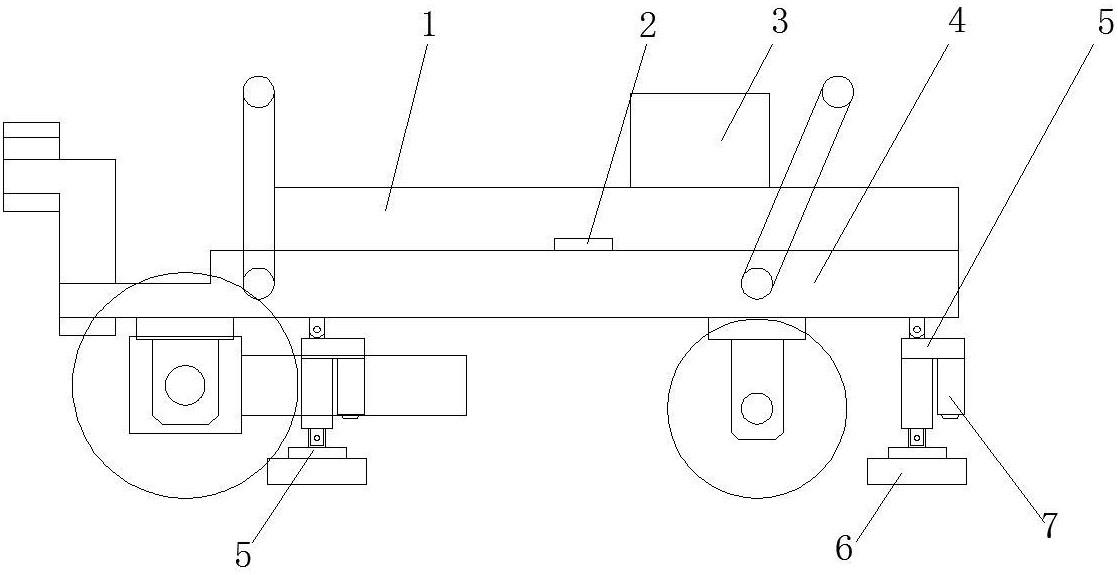
1.一种内置安全防护装置的球罐外壁作业机器人,包括作业机器人(1)、重力加速度传感器(2)和内置的安全防护装置(5),其特征在于:所述内置的安全防护装置(5)包括有电动推缸(7)和电磁吸附件(6),所述电磁吸附件(6)内设置有激磁线圈,所述激磁线圈电性连接有激磁电路,所述激磁电路同时电性连接重力加速度传感器(2);
2.根据权利要求1所述的内置安全防护装置的球罐外壁作业机器人,其特征在于:所述内置的安全防护装置(5)为四组,分别位于所述作业机器人前后部的左右两侧,所述电动推缸(7)一端铰接于所述作业机器人(1)的底板(4)上,另一端与所述电磁吸附件(6)固定连接。
3.根据权利要求1所述的内置安全防护装置的球罐外壁作业机器人,其特征在于:所述重力加速度传感器(2)检测到作业机器人(1)处于跌落状态时,重力加速度传感器(2)将信号传输给控制器(3),从而快速控制电动推缸(7)推动电磁吸附件(6),同时控制激磁电路与激磁线圈电性导通,使电磁吸附件(6)吸附于球罐外壁作业面。
4.根据权利要求1所述的内置安全防护装置的球罐外壁作业机器人,其特征在于:所述重力加速度传感器(2)检测到作业机器人(1)处于正常作业状态时,所述激磁电路与所述激磁线圈电性断路,所述电磁吸附件(6)内的激磁线圈失电,且在所述电动推缸(7)的作用下使所述电磁吸附件(6)脱离球罐作业面,回到初始位置。
5.根据权利要求1所述的内置安全防护装置的球罐外壁作业机器人,其特征在于:所述的内置安全防护装置(5)还包括有圆筒(8),所述圆筒(8)顶部外壁固定在所述作业机器人(1)的底板(4)上,所述圆筒(8)的内部滑动连接有滑杆(9),所述滑杆(9)的一端固定安装从动电磁轮(10),所述从动电磁轮(10)通过设置磁力电路与低磁模块所述控制器(3)进行电性连接,所述低磁模块固定安装在所述控制器(3)上。
6.根据权利要求5所述的内置安全防护装置的球罐外壁作业机器人,其特征在于:所述滑杆(9)的顶端固定连接有限位板(11),所述限位板(11)与所述圆筒(8)的顶部内壁之间设置有减震弹簧(12)。
技术总结
本技术涉及球罐机器人技术领域,尤其涉及一种内置安全防护装置的球罐外壁作业机器人,包括作业机器人、重力加速度传感器和内置的安全防护装置,所述内置的安全防护装置包括有电动推缸和电磁吸附件,所述电磁吸附件内设置有激磁线圈,所述激磁线圈电性连接有激磁电路,所述激磁电路同时电性连接重力加速度传感器,所述重力加速度传感器信号传输连接有控制器,所述控制器控制所述电动推缸进行伸缩移动。本装置提供一种内置安全防护装置的球罐外壁作业机器人,当检测到作业机器人发生打滑或其他易坠落事故时,内置安全防护装置启动,将作业机器人牢固地吸附于球罐作业面,取代人为安装或拆卸防坠器,节省辅助作业时间,同时保证安全可靠。
技术研发人员:管陈锋,唐萍,陈永贵,沈子韬,缪存坚,滕国阳,杜兴吉
受保护的技术使用者:浙江省特种设备科学研究院
技术研发日:20230620
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!