关节驱动装置及机械手的制作方法
本申请属于关节驱动,更具体地说,是涉及一种关节驱动装置及机械手。
背景技术:
1、新一代的机器人需要具备较多的自由度(dof)以实现更加灵活精细地操作物体,例如,机械手是新一代的机器人身上具有最多自由度的部分,为了更加灵活精细地操作加工工具或者操作物体,需要具备相对较高自由度(dof)。
2、由于机械手的有限封装空间,腱传动的设计方案被应用在具有相对较高自由度(dof)的机械手上,如图1所示。为了满足较高自由度(dof),需要设置数量较多的致动器,这导致致动器的总体体积占用大、重量大、以及控制系统复杂、成本较昂贵等问题。
技术实现思路
1、本申请实施例的目的在于提供一种关节驱动装置及机械手,以解决现有技术的技术问题。
2、为实现上述目的,本申请采用的技术方案是:提供了一种关节驱动装置,用于驱动关节,所述关节包括基座和转动端,所述转动端可相对于所述基座转动;所述关节驱动装置包括致动器和腱,所述致动器的输出端具有一绞腱元件;所述腱包括驱动腱和复位腱;所述驱动腱的第一端与所述转动端连接,所述驱动腱的第二端与所述绞腱元件连接;所述复位腱的第一端与所述转动端连接;所述复位腱的第二端与所述绞腱元件连接,或者,所述复位腱的第二端固定设置。
3、本申请的一种实施例中,所述关节驱动装置还包括安装舱体组件,所述安装舱体组件包括间隔设置的第一固定板和第二固定板;
4、所述致动器安装在所述第一固定板上,所述绞腱元件位于所述第一固定板一侧,所述驱动腱与所述绞腱元件连接并经所述第一固定板一侧后与所述转动端连接;
5、所述复位腱与所述绞腱元件连接并经过至少一个第二导向装置后沿着所述第二固定板一侧布置,或者,所述复位腱的第二端固定设置在所述第二固定板上。
6、本申请的一种实施例中,所述关节驱动装置还包括腱鞘和腱鞘固定组件;所述腱鞘固定组件包括第一腱鞘固定组件和第二腱鞘固定组件;所述腱鞘的一端设置在第一腱鞘固定组件处,另一端设置在关节的第二腱鞘固定组件处;所述第一腱鞘固定组件安装在所述安装舱体组件上;所述腱鞘为可挠性弯曲件,所述腱鞘包括腱鞘一和腱鞘二,所述腱一和所述腱二分别穿过所述腱鞘一和所述腱鞘二后与所述转动端连接。
7、本申请的一种实施例中,所述驱动腱的第二端和所述复位腱的第二端分别与所述绞腱元件连接;所述驱动腱和所述复位腱被配置为在所述绞腱元件上的卷绕方向相反;
8、所述驱动腱和所述复位腱相连,且均为所述腱上的一部分,所述绞腱元件上具有一个绕线部,所述腱绕在所述绕线部上;或者,所述绞腱元件上具有两个绕线部,所述驱动腱和复位腱分别绕在两个绕线部上。
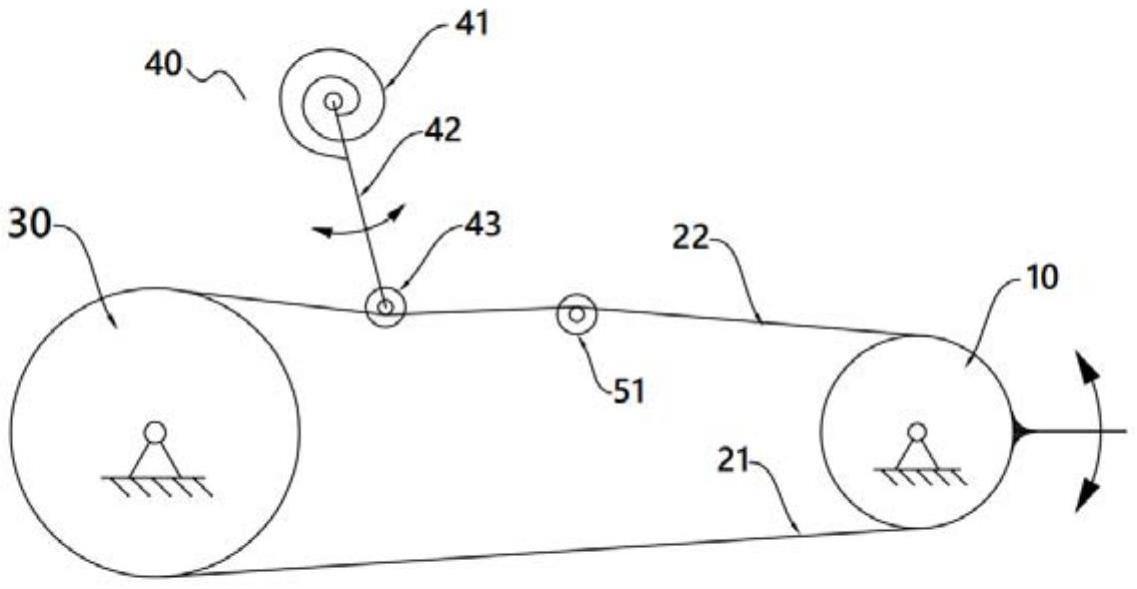
9、本申请的一种实施例中,所述关节驱动装置还包括弹性机构,所述弹性机构被配置为作用于所述腱并对所述腱调节张力。
10、本申请的一种实施例中,所述弹性机构包括第一弹性元件以及偏置元件;所述第一弹性元件被配置为可直接或者间接施加扭力于所述偏置元件并可带动所述偏置元件转动,所述腱经过所述偏置元件。
11、本申请的一种实施例中,所述关节驱动装置还包括安装座和第一限位单元,所述第一弹性元件和所述偏置元件均安装在所述安装座处;
12、所述第一弹性元件的一端相对所述安装座固定,所述第一弹性元件的另一端连接所述偏置元件并带动所述偏置元件运动;
13、所述第一限位单元被配置为对所述偏置元件的运动幅度或运动轨迹进行限制。
14、本申请的一种实施例中,所述弹性机构包括第二弹性元件以及偏置元件;所述第二弹性元件被配置为可直接或者间接施加弹力于所述偏置元件并可带动所述偏置元件移动,所述腱经过所述偏置元件;所述关节驱动装置还包括安装座,所述第二弹性元件和所述偏置元件均安装在所述安装座处。
15、本申请的一种实施例中,所述弹性机构包括第三弹性元件;所述第三弹性元件设置在所述驱动腱上,或者,所述第三弹性元件设置在所述驱动腱上。
16、本申请还提供了一种机械手,包括掌部单元和至少一个手指单元,还包括如上所述的关节驱动装置。
17、本申请的有益效果在于:
18、本申请提供的关节驱动装置,一个关节的自由度能够通过使用一个致动器来进行控制。所述致动器的输出端具有一个绞腱元件,关节驱动装置的设计结构简单,布局紧促,解决了致动器的总体积占用大、重量大、控制系统复杂、成本较昂贵等问题。另外,本申请还设置了弹性机构,其作用于所述腱并为其提供张力,以解决使用一个致动器对关节进行驱动时腱容易松弛的问题。
技术特征:
1.一种关节驱动装置,用于驱动关节,所述关节包括基座和转动端,所述转动端可相对于所述基座转动;其特征在于,所述关节驱动装置包括致动器和腱,所述致动器的输出端具有一绞腱元件;所述腱包括驱动腱和复位腱;所述驱动腱的第一端与所述转动端连接,所述驱动腱的第二端与所述绞腱元件连接;所述复位腱的第一端与所述转动端连接;所述复位腱的第二端与所述绞腱元件连接,或者,所述复位腱的第二端固定设置。
2.如权利要求1所述的一种关节驱动装置,其特征在于,所述关节驱动装置还包括安装舱体组件,所述安装舱体组件包括间隔设置的第一固定板和第二固定板;
3.如权利要求2所述的一种关节驱动装置,其特征在于,所述关节驱动装置还包括腱鞘和腱鞘固定组件;所述腱鞘固定组件包括第一腱鞘固定组件和第二腱鞘固定组件;所述腱鞘的一端设置在第一腱鞘固定组件处,另一端设置在关节的第二腱鞘固定组件处;所述第一腱鞘固定组件安装在所述安装舱体组件上;所述腱鞘为可挠性弯曲件,所述腱鞘包括腱鞘一和腱鞘二,所述腱一和所述腱二分别穿过所述腱鞘一和所述腱鞘二后与所述转动端连接。
4.如权利要求1所述的一种关节驱动装置,其特征在于,所述驱动腱的第二端和所述复位腱的第二端分别与所述绞腱元件连接;所述驱动腱和所述复位腱被配置为在所述绞腱元件上的卷绕方向相反;
5.如权利要求1所述的一种关节驱动装置,其特征在于,所述关节驱动装置还包括弹性机构,所述弹性机构被配置为作用于所述腱并对所述腱调节张力。
6.如权利要求5所述的一种关节驱动装置,其特征在于,所述弹性机构包括第一弹性元件以及偏置元件;所述第一弹性元件被配置为可直接或者间接施加扭力于所述偏置元件并可带动所述偏置元件转动,所述腱经过所述偏置元件。
7.如权利要求6所述的一种关节驱动装置,其特征在于,所述关节驱动装置还包括安装座和第一限位单元,所述第一弹性元件和所述偏置元件均安装在所述安装座处;
8.如权利要求5所述的一种关节驱动装置,其特征在于,所述弹性机构包括第二弹性元件以及偏置元件;所述第二弹性元件被配置为可直接或者间接施加弹力于所述偏置元件并可带动所述偏置元件移动,所述腱经过所述偏置元件;所述关节驱动装置还包括安装座,所述第二弹性元件和所述偏置元件均安装在所述安装座处。
9.如权利要求5所述的一种关节驱动装置,其特征在于,所述弹性机构包括第三弹性元件;所述第三弹性元件设置在所述驱动腱上,或者,所述第三弹性元件设置在所述驱动腱上。
10.一种机械手,包括掌部单元和至少一个手指单元,其特征在于,还包括如权利要求1-9任一项所述的关节驱动装置。
技术总结
本申请公开了一种关节驱动装置,用于驱动关节,所述关节驱动装置包括致动器和腱,所述致动器的输出端具有一绞腱元件;所述腱包括驱动腱和复位腱;所述驱动腱的第一端与所述转动端连接,所述驱动腱的第二端与所述绞腱元件连接;所述复位腱的第一端与所述转动端连接,所述复位腱的第二端与所述绞腱元件连接或者所述复位腱的第二端固定设置;所述弹性机构被配置为作用于所述腱并对所述腱调节张力。本申请还公开了一种机械手,包括如上所述的关节驱动装置。
技术研发人员:任化龙,李文强,刘爱珍,刘寅
受保护的技术使用者:深圳忆海原识科技有限公司
技术研发日:20230620
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!