一种复合夹具装置的制作方法
本技术涉及夹具,特别涉及一种复合夹具装置。
背景技术:
1、在自动化精调作业装置上,轨下垫板多层叠放于料箱格中,在进行铁路精调作业时,需对轨下垫板进行取料,常规厚度垫板进行机械夹取,而较薄的垫板则需采用真空吸附,因工况需要,常规机构无法同步满足旋转、机械夹取、真空吸附。
2、公开号为cn116141297a的专利公开了一种轴承后挡上料压装机械手,整机由机械手走行横梁、机械手升降臂基板、机械手升降臂、机械手压装臂、机械手抓取卡盘、机械手卡爪组成,该专利只能对常规厚度垫板进行机械夹取,无法同步满足旋转、机械夹取、真空吸附。
技术实现思路
1、本实用新型为解决上述现有技术无法同步满足旋转、机械夹取、真空吸附的问题,提供了一种复合夹具装置。
2、本实用新型采用的技术方案是:
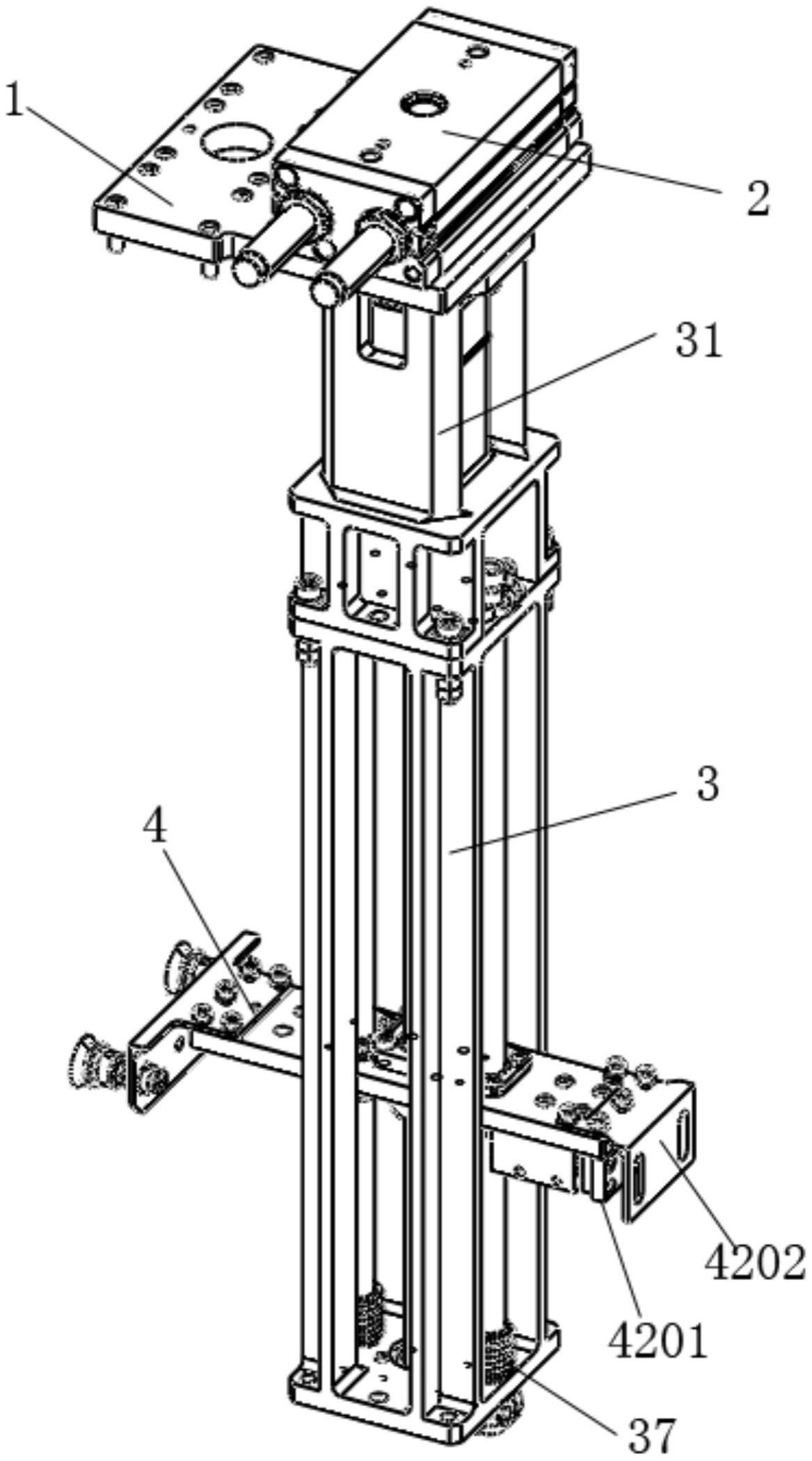
3、本实用新型提供一种复合夹具装置,包括固定基座、设在固定基座上方的旋转装置、设在旋转装置下方的升降装置、套在升降装置上的复合取料装置,所述复合取料装置包括套在升降装置上的滑板、设在滑板一端的夹爪机构和设在滑板另一端的真空吸盘装置,真空吸盘装置通过真空负压来实现的物料的吸取。
4、进一步地,所述滑板两端均安装夹爪机构或所述滑板两端均安装真空吸盘装置。
5、进一步地,所述固定基座与运动单元连接。
6、进一步地,所述旋转装置可旋转180°换向回转。
7、进一步地,所述旋转装置采用回转气缸或液压回转台。
8、进一步地,所述升降装置包括与旋转装置连接的支架、设在支架内的伺服电机、与伺服电机的输出轴连接的联轴器、与联轴器连接的丝杆副、设在滑板四周的导杆、设在丝杆副上的滑块,所述滑块与滑板连接。
9、进一步地,所述导杆的底部设有压缩弹簧,一方面可进行滑板的下限缓冲,另一方面也可实现装置到底问空载时的自动复位。
10、进一步地,所述夹爪机构包括与滑板一端连接的固定爪和设在固定爪内侧的气缸活动爪。
11、进一步地,所述气缸活动爪与气缸连接且可伸缩,所述固定爪为“l”型,气缸活动爪通过气缸的伸缩调节两爪之间的间隙来实现物料的夹取。
12、进一步地,所述丝杆副可采用气缸、电缸替代。
13、与现有技术相比,本实用新型的有益效果是:
14、本实用新型根据所需夹具的物料特性,可切换气夹爪机构或真空吸盘装置进行取料,做一爪多用,夹具可进行快速转换夹具形式并完成取料,提升作业的可靠性与实用性。此外,滑板两端的接口一致,两端也可安装同一种夹具,在进行取料和投料时可进行交互替换,由此可以大大提高作业效率。
技术特征:
1.一种复合夹具装置,其特征在于,包括固定基座、设在固定基座上方的旋转装置、设在旋转装置下方的升降装置、套在升降装置上的复合取料装置,所述复合取料装置包括套在升降装置上的滑板、设在滑板一端的夹爪机构和设在滑板另一端的真空吸盘装置。
2.根据权利要求1所述的一种复合夹具装置,其特征在于,所述滑板两端均安装夹爪机构或所述滑板两端均安装真空吸盘装置。
3.根据权利要求1所述的一种复合夹具装置,其特征在于,所述固定基座与运动单元连接。
4.根据权利要求1所述的一种复合夹具装置,其特征在于,所述旋转装置可旋转180°换向回转。
5.根据权利要求1所述的一种复合夹具装置,其特征在于,所述旋转装置采用回转气缸或液压回转台。
6.根据权利要求1所述的一种复合夹具装置,其特征在于,所述升降装置包括与旋转装置连接的支架、设在支架内的伺服电机、与伺服电机的输出轴连接的联轴器、与联轴器连接的丝杆副、设在滑板四周的导杆、设在丝杆副上的滑块,所述滑块与滑板连接。
7.根据权利要求6所述的一种复合夹具装置,其特征在于,所述导杆的底部设有压缩弹簧。
8.根据权利要求1所述的一种复合夹具装置,其特征在于,所述夹爪机构包括与滑板一端连接的固定爪和设在固定爪内侧的气缸活动爪。
9.根据权利要求8所述的一种复合夹具装置,其特征在于,所述气缸活动爪与气缸连接且可伸缩,所述固定爪为“l”型。
10.根据权利要求6所述的一种复合夹具装置,其特征在于,所述丝杆副可采用气缸、电缸替代。
技术总结
本技术公开了一种复合夹具装置,包括固定基座、设在固定基座上方的旋转装置、设在旋转装置下方的升降装置、套在升降装置上的复合取料装置,所述复合取料装置包括套在升降装置上的滑板、设在滑板一端的夹爪机构和设在滑板另一端的真空吸盘装置,本技术同步满足旋转、机械夹取、真空吸附,本技术在使用过程中,根据所需夹具的物料特性,可切换气夹爪机构或真空吸盘装置进行取料,做一爪多用,提升作业的可靠性与实用性。
技术研发人员:宋文彪,朱逸武,富弘毅,殷胜民,罗小波,牟彦澄
受保护的技术使用者:株洲嘉成科技发展股份有限公司
技术研发日:20230620
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!