一种工业机器人定位抓取装置的制作方法
本技术涉及抓取装置,具体为一种工业机器人定位抓取装置。
背景技术:
1、工业机器人和工业机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统。因其独特的操作灵活性,已在工业装配、安全防爆等领域得到广泛应用。
2、但现有的机器人或机械臂在对物体抓取时,或进行特殊工作抓取例如防爆灯其他工作时,对物件的夹持,始终通过机械传动夹持,工作人员稍不注意就会使夹持的力度过大而导致物件损坏,同时可能导致工作失败,损害资源,费时费力。
技术实现思路
1、本实用新型的目的在于提供一种工业机器人定位抓取装置,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种工业机器人定位抓取装置,包括底座、机械固件和机械臂,所述底座的顶面与机械固件的底面转动连接,所述机械臂贯穿机械固件,且机械臂与机械固件转动连接,所述机械臂远离机械固件的一端设置有定位抓取装置,所述定位抓取装置包括:连接件,所述连接件与机械臂转动连接,所述连接件的底面固定连接有气缸,所述气缸的输出轴表面固定连接有限位齿条,所述气缸的底端固定连接有推动块,所述连接件的底面固定连接有y型块,所述y型块的两端铰接有夹爪,所述夹爪靠近推动块的一端铰接有滚轮,所述夹爪远离推动块的一端固定连接有防滑块,启动气缸,会使夹爪远离滚轮的一端向中间收缩,对物体进行抓取。
3、优选的,所述推动块的中间部分为梯形,且推动块的底端被短杆贯穿,且短杆与推动块滑动连接,所述短杆贯穿有夹持轮,所述短杆的表面贴合有滑动板,所述滑动板与推动块滑动连接,所述滑动板远离短杆的一侧表面固定连接有弹簧,所述弹簧远离滑动板的一端与推动块的表面固定连接,所述短杆的表面固定连接有推杆,当抓取完毕后气缸继续推动时,进而使短杆推动推杆向靠近气缸的方向移动。
4、优选的,所述推杆远离短杆的一端铰接有齿轮一,所述齿轮一啮合有齿轮二,所述齿轮二被支杆贯穿,且支杆与齿轮二固定连接,且支杆贯穿y型块并与y型块转动连接,所述支杆的表面固定连接有连接杆,所述连接杆远离支杆的一端固定连接有限位板,短杆推动推杆向靠近气缸的方向移动,会使齿轮一带动齿轮二转动,从而使支杆进行转动,连接杆带动限位板对限位齿条卡紧,使气缸无法推动,即达到最大夹持力度,使定位抓取装置在对物件抓取时不会因为机械夹持力度过大而导致物件变形损坏。
5、优选的,所述滚轮与推动块中间梯形的斜面相对齐。
6、优选的,所述齿轮二的数量为两组,且两组所述齿轮二分别以齿轮一的中心线为对称轴对称啮合。
7、优选的,所述夹爪的数量为两组,且两组所述夹爪分别以y型块的中心线为对称轴对称设置。
8、与现有技术相比,本实用新型提供了一种工业机器人定位抓取装置,具备以下有益效果:
9、该工业机器人定位抓取装置,将机械固件以及机械臂调节至至需要抓取的物件的位置,将定位抓取装置对准需要抓取的物件,启动气缸,气缸会推会使夹爪远离滚轮的一端向中间收缩,对物体进行抓取,当抓取完毕后气缸继续推动时,推杆带动齿轮一与齿轮二啮合时,会使齿轮一带动齿轮二转动,从而使支杆进行转动,支杆转动会使连接杆转动一定距离,从而连接杆带动限位板对限位齿条卡紧,使气缸无法推动,即达到最大夹持力度,使定位抓取装置在对物件抓取时不会因为机械夹持力度过大而导致物件变形损坏。
技术特征:
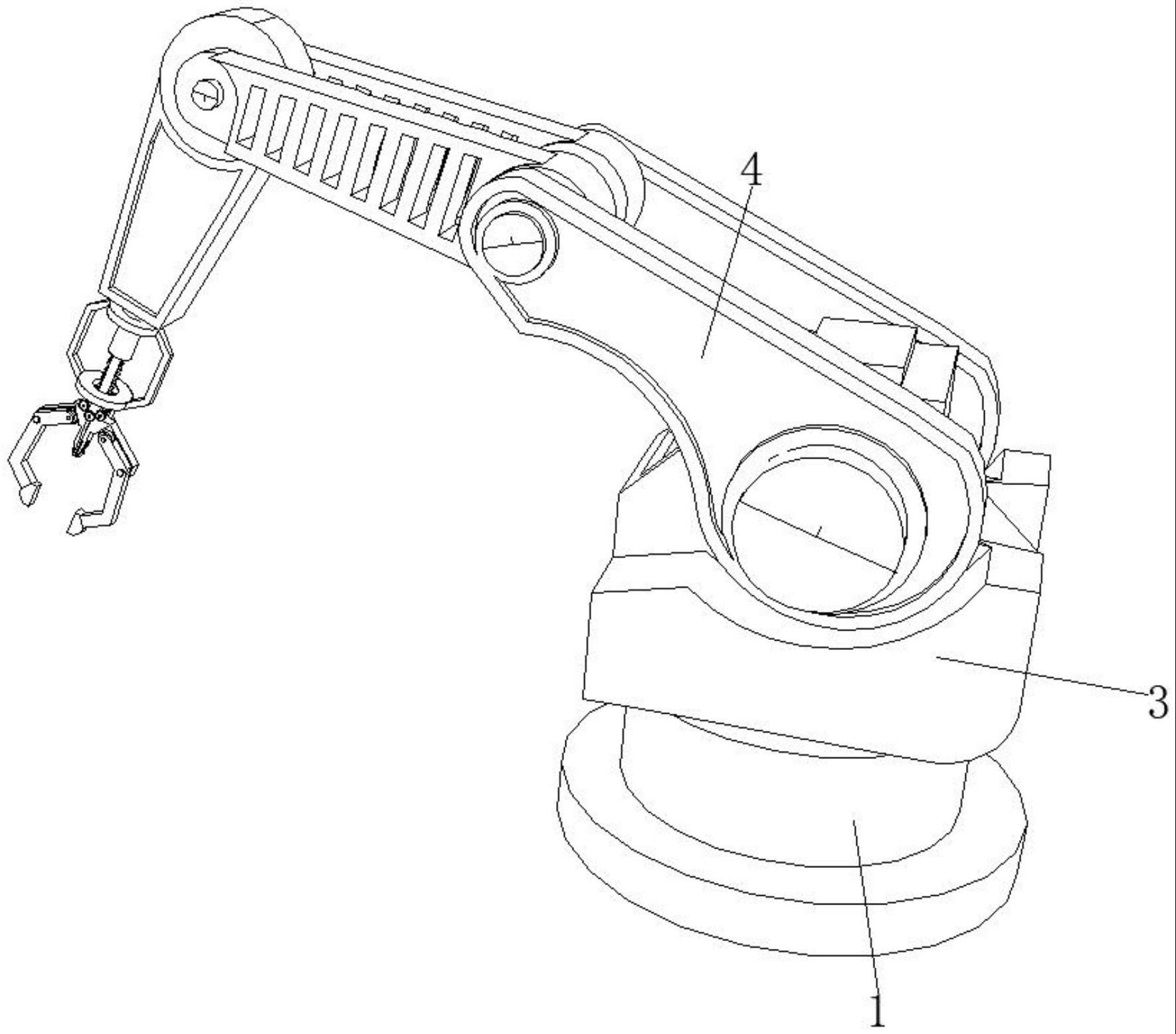
1.一种工业机器人定位抓取装置,包括底座(1)、机械固件(3)和机械臂(4),其特征在于:所述底座(1)的顶面与机械固件(3)的底面转动连接,所述机械臂(4)贯穿机械固件(3),且机械臂(4)与机械固件(3)转动连接,所述机械臂(4)远离机械固件(3)的一端设置有定位抓取装置(2),所述定位抓取装置(2)包括:
2.根据权利要求1所述的一种工业机器人定位抓取装置,其特征在于:所述推动块(24)的中间部分为梯形,且推动块(24)的底端被短杆(29)贯穿,且短杆(29)与推动块(24)滑动连接,所述短杆(29)贯穿有夹持轮(210),所述短杆(29)的表面贴合有滑动板(211),所述滑动板(211)与推动块(24)滑动连接,所述滑动板(211)远离短杆(29)的一侧表面固定连接有弹簧(212),所述弹簧(212)远离滑动板(211)的一端与推动块(24)的表面固定连接,所述短杆(29)的表面固定连接有推杆(213)。
3.根据权利要求2所述的一种工业机器人定位抓取装置,其特征在于:所述推杆(213)远离短杆(29)的一端铰接有齿轮一(214),所述齿轮一(214)啮合有齿轮二(215),所述齿轮二(215)被支杆(216)贯穿,且支杆(216)与齿轮二(215)固定连接,且支杆(216)贯穿y型块(25)并与y型块(25)转动连接,所述支杆(216)的表面固定连接有连接杆(217),所述连接杆(217)远离支杆(216)的一端固定连接有限位板(218)。
4.根据权利要求1所述的一种工业机器人定位抓取装置,其特征在于:所述滚轮(27)与推动块(24)中间梯形的斜面相对齐。
5.根据权利要求3所述的一种工业机器人定位抓取装置,其特征在于:所述齿轮二(215)的数量为两组,且两组所述齿轮二(215)分别以齿轮一(214)的中心线为对称轴对称啮合。
6.根据权利要求1所述的一种工业机器人定位抓取装置,其特征在于:所述夹爪(26)的数量为两组,且两组所述夹爪(26)分别以y型块(25)的中心线为对称轴对称设置。
技术总结
本技术涉及抓取装置技术领域,且公开了一种工业机器人定位抓取装置,包括底座、机械固件和机械臂,该工业机器人定位抓取装置,将机械固件以及机械臂调节至至需要抓取的物件的位置,将定位抓取装置对准需要抓取的物件,启动气缸,气缸会推会使夹爪远离滚轮的一端向中间收缩,对物体进行抓取,当抓取完毕后气缸继续推动时,推杆带动齿轮一与齿轮二啮合时,会使齿轮一带动齿轮二转动,从而使支杆进行转动,支杆转动会使连接杆转动一定距离,从而连接杆带动限位板对限位齿条卡紧,使气缸无法推动,即达到最大夹持力度,使定位抓取装置在对物件抓取时不会因为机械夹持力度过大而导致物件变形损坏。
技术研发人员:江建国
受保护的技术使用者:上海普雅自动化科技有限公司
技术研发日:20230625
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!