一种具有抗震缓冲性能的机械手臂的制作方法
本技术涉及机械手臂相关,具体为一种具有抗震缓冲性能的机械手臂。
背景技术:
1、为了降低人工的劳动强度,继而发明了机械手臂,通过机械手臂可以将一些重物进行运输,通过电脑端可以对机械手臂进行编程操控,从而使得机械手臂能够自动化进行运作,继而降低了人工的劳动强度;
2、参考公开号为cn207373186u的一种带有缓冲底座的涂装机械手,其通过采用多层缓冲结构,使涂装机械手在运输过程中产生的晃动可以及时得到缓冲,散去,避免硬性碰撞,很大程度上保证了机械手的安全,但是,还存在以下的问题:
3、在上述装置实际使用中,虽然通过多层缓冲结构来对机械手起到抗震的作用,但是,在运输中经过较大坑洼地面时,会使得多层缓冲结构起到的作用降低,从而使得抗震效果会有所下降。
4、因此我们便提出了一种具有抗震缓冲性能的机械手臂能够很好的解决以上问题。
技术实现思路
1、本实用新型的目的在于提供一种具有抗震缓冲性能的机械手臂,以解决上述背景技术提出的目前市场上抗震效果较差的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种具有抗震缓冲性能的机械手臂,包括机械手臂本体和底座所述机械手臂本体的底部设置有底座;
3、还包括:
4、第一阻尼杆,顶部固定安装在所述底座的底部,且第一阻尼杆的底部固定在底托的顶部,所述底托的底部贴合在卡盘的顶部;
5、第一减震簧,嵌套在第一阻尼杆上,且第一减震簧的顶部连接在所述底座的底部,并且第一减震簧的底部连接在所述底托的底部。
6、优选的,所述底座的底部转动连接有支架,且支架的另一端转动连接在底托的底部,且支架的内端连接有第二阻尼杆。
7、通过上述结构设置,可以使得底座和底托更加稳定。
8、优选的,所述第二阻尼杆的中部嵌套有第二减震簧,且第二减震簧的两端与所述支架的内端相连接。
9、通过上述结构设置,可以使得第二阻尼杆降低第二减震簧的回弹。
10、优选的,所述底托的侧边贯穿滑动有插销,且插销的底部伸入卡盘的内部。
11、通过上述结构设置,可以使得插销能够起到卡合的作用。
12、优选的,所述插销的底部固定有卡合块,且卡合块的外端滑动卡合在卡槽的内部,并且卡槽开设在所述卡盘的内部。
13、通过上述结构设置,可以使得插销能够稳定的进行卡合。
14、优选的,所述卡合块的外端滑动卡合有凸块,且凸块的外端呈弧形设置,并且凸块的外端卡合在凹槽的内部,所述凹槽开设在卡盘的内部。
15、通过上述结构设置,可以使得凸块受外力进行能够进行移动。
16、优选的,所述凸块的内端连接有弹簧,且弹簧的另一端连接在所述卡合块的内部。
17、通过上述结构设置,可以使得弹簧能够对凸块起到限位的作用。
18、与现有技术相比,本实用新型的有益效果是:该具有抗震缓冲性能的机械手臂具有良好的抗震性能和可以对机械手臂本体进行快速安装,通过第一阻尼杆的运动可以起到抗震的作用,从而使得抗震性能提高,并且通过插销可以对机械手臂本体进行快速的安装,其具体内容如下:
19、(1)设置有第一阻尼杆,通过第一阻尼杆的伸缩,使得底座和底托之间的距离能够发生改变,从而使得能够对振动进行吸收,继而使得机械手臂本体能够具有很好的抗震性;
20、(2)设置有插销,通过插销的转动,使得插销能够与卡槽之间相互构成卡合机构,继而使得机械手臂本体能够快速的进行拆卸安装,从而提高了机械手臂本体移动的效率。
技术特征:
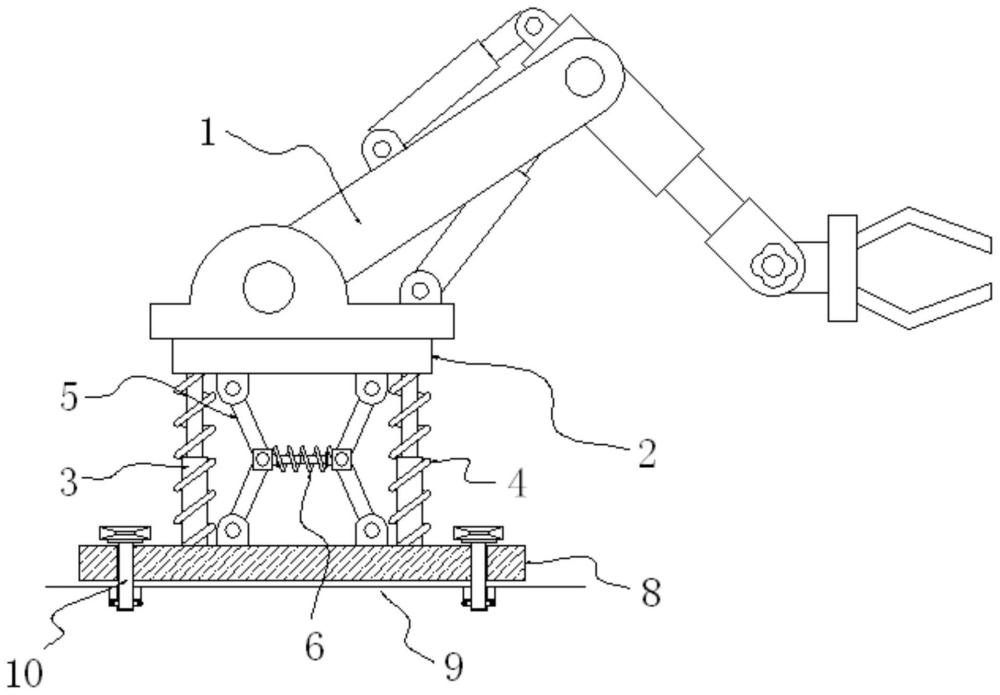
1.一种具有抗震缓冲性能的机械手臂,包括机械手臂本体(1)和底座(2)所述机械手臂本体(1)的底部设置有底座(2);
2.根据权利要求1所述的一种具有抗震缓冲性能的机械手臂,其特征在于:所述底座(2)的底部转动连接有支架(5),且支架(5)的另一端转动连接在底托(8)的底部,且支架(5)的内端连接有第二阻尼杆(7)。
3.根据权利要求2所述的一种具有抗震缓冲性能的机械手臂,其特征在于:所述第二阻尼杆(7)的中部嵌套有第二减震簧(6),且第二减震簧(6)的两端与所述支架(5)的内端相连接。
4.根据权利要求1所述的一种具有抗震缓冲性能的机械手臂,其特征在于:所述底托(8)的侧边贯穿滑动有插销(10),且插销(10)的底部伸入卡盘(9)的内部。
5.根据权利要求4所述的一种具有抗震缓冲性能的机械手臂,其特征在于:所述插销(10)的底部固定有卡合块(11),且卡合块(11)的外端滑动卡合在卡槽(12)的内部,并且卡槽(12)开设在所述卡盘(9)的内部。
6.根据权利要求5所述的一种具有抗震缓冲性能的机械手臂,其特征在于:所述卡合块(11)的外端滑动卡合有凸块(13),且凸块(13)的外端呈弧形设置,并且凸块(13)的外端卡合在凹槽(14)的内部,所述凹槽(14)开设在卡盘(9)的内部。
7.根据权利要求6所述的一种具有抗震缓冲性能的机械手臂,其特征在于:所述凸块(13)的内端连接有弹簧(15),且弹簧(15)的另一端连接在所述卡合块(11)的内部。
技术总结
本技术公开了一种具有抗震缓冲性能的机械手臂,包括机械手臂本体和底座所述机械手臂本体的底部设置有底座;还包括:第一阻尼杆,顶部固定安装在所述底座的底部,且第一阻尼杆的底部固定在底托的顶部,所述底托的底部贴合在卡盘的顶部;第一减震簧,嵌套在第一阻尼杆上,且第一减震簧的顶部连接在所述底座的底部,并且第一减震簧的底部连接在所述底托的底部;所述底座的底部转动连接有支架,且支架的另一端转动连接在底托的底部。该具有抗震缓冲性能的机械手臂安装有第一阻尼杆,通过第一阻尼杆的伸缩,使得底座和底托之间的距离能够发生改变,从而使得能够对振动进行吸收,继而使得机械手臂本体能够具有很好的抗震性。
技术研发人员:林少冰,任天亮,王彦波,孙小明,刘轶松
受保护的技术使用者:江苏安托智能装备科技有限公司
技术研发日:20230626
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!