一种机器人机座的制作方法
本技术涉及机器人,特别是一种机器人机座。
背景技术:
1、机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作。而工业机器人则是用于工业加工行业的机器人,能代替人力来完成复杂机械式的工作,大大提高了工作效率,现有技术中,大部分机器人机座在工作时无法保证机器人机座的稳定性,机器人在工作时需要保持平稳不倾斜,因此机器人机座应该具有调节稳定性的功能,机器人机座稳定性不好可能会导致机器人在运动过程中难以保持稳定,可能出现晃动或抖动的现象,从而影响其精度和准确性。
技术实现思路
1、本部分的目的在于概述本实用新型的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本申请的说明书摘要和实用新型名称中可能会做些简化或省略以避免使本部分、说明书摘要和实用新型名称的目的模糊,而这种简化或省略不能用于限制本实用新型的范围。
2、鉴于上述和/或现有的机器人机座中存在的问题,提出了本实用新型。
3、因此,本实用新型所要解决的问题在于现有技术中,大部分机器人机座在工作时无法保证机器人机座的稳定性,机器人在工作时需要保持平稳不倾斜,因此机器人机座应该具有调节稳定性的功能,机器人机座稳定性不好可能会导致机器人在运动过程中难以保持稳定,可能出现晃动或抖动的现象,从而影响其精度和准确性。
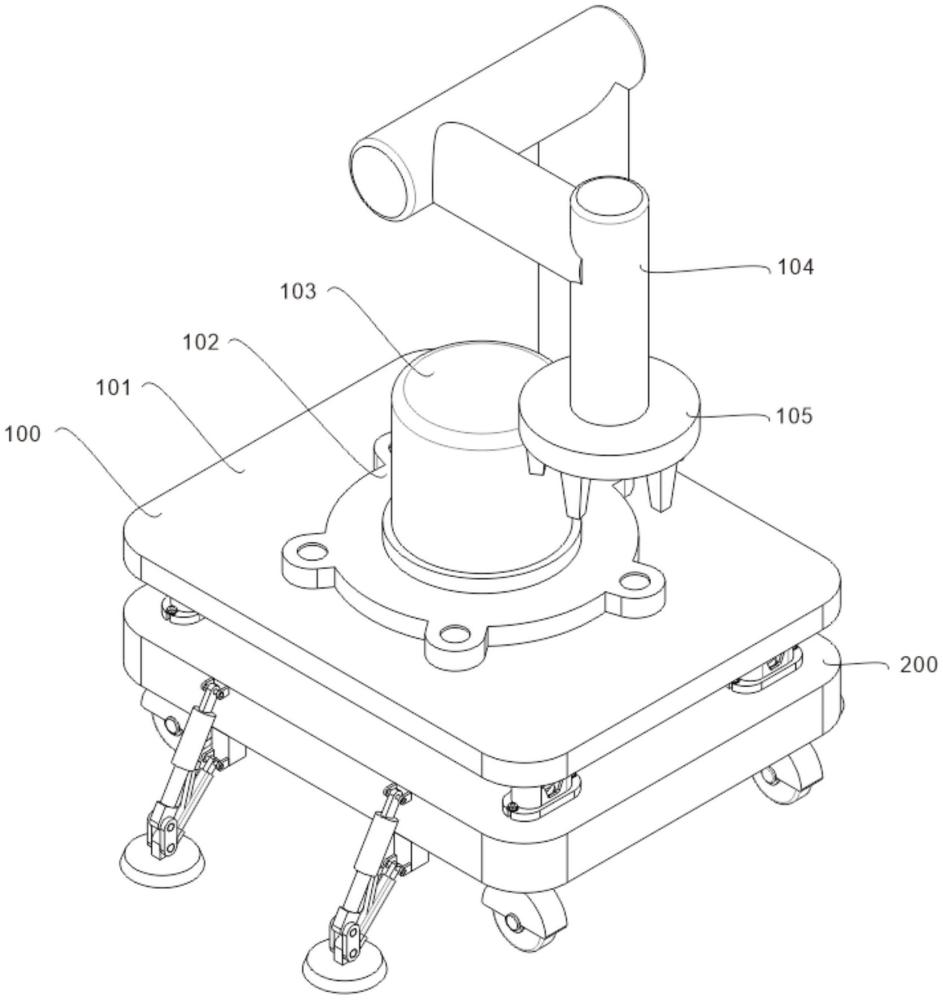
4、为解决上述技术问题,本实用新型提供如下技术方案:一种机器人机座,其包括主体组件,包括底台、固定板、连接条、机械臂以及抓手,所述固定板固定于所述底台顶部,所述连接条通过轴承与所述固定板顶部转动连接,所述机械臂固定于所述连接条顶部,所述抓手与所述机械臂一端固定;
5、缓冲组件,设置于所述底台上,包括缓冲件、移动件以及支撑件,所述缓冲件设置于所述底台底部,所述移动件设置于所述缓冲件底部,所述支撑件位于所述移动件上。
6、作为本实用新型所述机器人机座的一种优选方案,其中:所述缓冲件包括压板和第一弹簧,所述压板固定于所述底台底部,所述第一弹簧与所述压板底部固定。
7、作为本实用新型所述机器人机座的一种优选方案,其中:所述缓冲件还包括支撑框和定位板,所述支撑框套设于所述压板外侧,所述定位板固定于所述支撑框底部。
8、作为本实用新型所述机器人机座的一种优选方案,其中:所述缓冲件还包括连接杆、活动柱、支撑块以及活动套,所述连接杆固定于所述底台底部,所述活动柱插接于所述连接杆一侧,所述活动柱和所述连接杆活动连接,所述支撑块固定于所述活动柱一侧,所述活动套固定于所述支撑块底部。
9、作为本实用新型所述机器人机座的一种优选方案,其中:所述缓冲件还包括第二弹簧、支撑柱以及定位块,所述第二弹簧固定于所述活动套一端,所述活动套插接于所述第二弹簧内,所述活动套和所述第二弹簧活动连接,所述定位块固定于所述支撑柱一端。
10、作为本实用新型所述机器人机座的一种优选方案,其中:所述移动件包括移动板和滚轮,所述移动板固定于所述定位板底部,所述滚轮位于所述移动板下方。
11、作为本实用新型所述机器人机座的一种优选方案,其中:所述移动件还包括固定框、连接柱以及活动条,所述固定框套设于所述滚轮外侧,所述连接柱插接于所述滚轮一侧,所述连接柱和所述滚轮活动连接,所述活动条固定于所述固定框顶部。
12、作为本实用新型所述机器人机座的一种优选方案,其中:所述支撑件包括压盘和移动块,所述压盘设置于所述滚轮一侧,所述移动块固定于所述移动块顶部。
13、作为本实用新型所述机器人机座的一种优选方案,其中:所述支撑件还包括活动杆、第一支撑条以及第一连接块,所述活动杆固定于所述移动块一侧,所述第一支撑条插接于所述活动杆一侧,所述活动杆和所述第一支撑条活动连接,所述第一连接块固定于所述第一支撑条一侧。
14、作为本实用新型所述机器人机座的一种优选方案,其中:所述支撑件还包括液压杆、第二支撑条、第二连接块以及移动杆,所述液压杆与所述移动块铰接,所述液压杆与所述移动块活动连接,所述第二支撑条插接于所述第二支撑条一侧,所述第二支撑条和所述第二支撑条活动连接,所述第二连接块固定于所述第二支撑条一侧,所述移动杆固定于所述液压杆一侧。
15、本实用新型有益效果为:通过缓冲组件的设置,可以在机器人机座移动时保持机器人的稳定性,防止机器人发生倾斜,从而影响机器人的精度和准确性,提高了使用的便捷性。
技术特征:
1.一种机器人机座,其特征在于:包括,
2.如权利要求1所述的机器人机座,其特征在于:所述缓冲件(201)包括压板(201a)和第一弹簧(201b),所述压板(201a)固定于所述底台(101)底部,所述第一弹簧(201b)与所述压板(201a)底部固定。
3.如权利要求2所述的机器人机座,其特征在于:所述缓冲件(201)还包括支撑框(201c)和定位板(201d),所述支撑框(201c)套设于所述压板(201a)外侧,所述定位板(201d)固定于所述支撑框(201c)底部。
4.如权利要求3所述的机器人机座,其特征在于:所述缓冲件(201)还包括连接杆(201e)、活动柱(201f)、支撑块(201g)以及活动套(201h),所述连接杆(201e)固定于所述底台(101)底部,所述活动柱(201f)插接于所述连接杆(201e)一侧,所述活动柱(201f)和所述连接杆(201e)活动连接,所述支撑块(201g)固定于所述活动柱(201f)一侧,所述活动套(201h)固定于所述支撑块(201g)底部。
5.如权利要求4所述的机器人机座,其特征在于:所述缓冲件(201)还包括第二弹簧(201i)、支撑柱(201j)以及定位块(201k),所述第二弹簧(201i)固定于所述活动套(201h)一端,所述活动套(201h)插接于所述第二弹簧(201i)内,所述活动套(201h)和所述第二弹簧(201i)活动连接,所述定位块(201k)固定于所述支撑柱(201j)一端。
6.如权利要求4或5所述的机器人机座,其特征在于:所述移动件(202)包括移动板(202a)和滚轮(202b),所述移动板(202a)固定于所述定位板(201d)底部,所述滚轮(202b)位于所述移动板(202a)下方。
7.如权利要求6所述的机器人机座,其特征在于:所述移动件(202)还包括固定框(202c)、连接柱(202d)以及活动条(202e),所述固定框(202c)套设于所述滚轮(202b)外侧,所述连接柱(202d)插接于所述滚轮(202b)一侧,所述连接柱(202d)和所述滚轮(202b)活动连接,所述活动条(202e)固定于所述固定框(202c)顶部。
8.如权利要求7所述的机器人机座,其特征在于:所述支撑件(203)包括压盘(203a)和移动块(203b),所述压盘(203a)设置于所述滚轮(202b)一侧,所述移动块(203b)固定于所述移动块(203b)顶部。
9.如权利要求8所述的机器人机座,其特征在于:所述支撑件(203)还包括活动杆(203c)、第一支撑条(203d)以及第一连接块(203e),所述活动杆(203c)固定于所述移动块(203b)一侧,所述第一支撑条(203d)插接于所述活动杆(203c)一侧,所述活动杆(203c)和所述第一支撑条(203d)活动连接,所述第一连接块(203e)固定于所述第一支撑条(203d)一侧。
10.如权利要求8或9所述的机器人机座,其特征在于:所述支撑件(203)还包括液压杆(203f)、第二支撑条(203g)、第二连接块(203h)以及移动杆(203i),所述液压杆(203f)与所述移动块(203b)铰接,所述液压杆(203f)与所述移动块(203b)活动连接,所述第二支撑条(203g)插接于所述第二支撑条(203g)一侧,所述第二支撑条(203g)和所述第二支撑条(203g)活动连接,所述第二连接块(203h)固定于所述第二支撑条(203g)一侧,所述移动杆(203i)固定于所述液压杆(203f)一侧。
技术总结
本技术公开了一种机器人机座,包括主体组件,包括底台、固定板、连接条、机械臂以及抓手,所述固定板固定于所述底台顶部,所述连接条通过轴承与所述固定板顶部转动连接,所述机械臂固定于所述连接条顶部,所述抓手与所述机械臂一端固定,缓冲组件,设置于所述底台上,包括缓冲件、移动件以及支撑件,所述缓冲件设置于所述底台底部,所述移动件设置于所述缓冲件底部,所述支撑件位于所述移动件上。本技术有益效果为:通过缓冲组件的设置,可以在机器人机座移动时保持机器人的稳定性,防止机器人发生倾斜,从而影响机器人的精度和准确性,提高了使用的便捷性。
技术研发人员:伊清,乐文欢,夏峥嵘,张克永
受保护的技术使用者:宁波百易东田汽车部件有限公司
技术研发日:20230626
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!