智能推车送餐机器人的制作方法
本技术涉及推车送餐机器人,尤其涉及智能推车送餐机器人。
背景技术:
1、送餐机器人可以按照预先制定好的路线,采用有轨或者无轨的形式,按指令端盘送餐到指定桌台,发出语音提示后由顾客或者服务员将餐盘转移到餐桌。也可以加挂推车,完成餐厅中的简单重复的体力工作。机器人行进平稳,可以实现人机互动,遇到障碍会提前自动停止而不会触碰到障碍物,同时发出语音提示。
2、根据中国专利授权公告号cn213562613u提供的“一种智能推车送餐机器人”,通过支撑板支撑菜盘,在拿出菜盘时,弹簧推动支撑板一端向上移动,支撑板顶面呈倾斜状,从而使支撑板顶面上的汤汁自动流到导水槽和条形通孔内部,最后,穿过条形通孔流向收集口内部,无需人工清理,干净卫生。但实际使用过程仍存在需要改进的地方,该装置在使用时,由于出菜口处设置为开口,无法对运送的食物进行隔离以及菜品的保温,而且空气中的飞虫以及其他杂物会对食物卫生情况造成一定的影响。
3、为此设计智能推车送餐机器人来解决上述问题。
技术实现思路
1、本实用新型提供智能推车送餐机器人,解决了由于出菜口处设置为开口,无法对运送的食物进行隔离以及菜品的保温,而且空气中的飞虫以及其他杂物会对食物卫生情况造成一定的影响的技术问题。
2、为解决上述技术问题,本实用新型提供的智能推车送餐机器人,包括送餐车,所述送餐车的一侧设有机器人主体,所述送餐车内壁底端的右侧固定安装有固定块,所述送餐车一侧的底部固定安装有正反转电机,所述正反转电机的传动轴穿过送餐车并与送餐车内部设置的丝杆固定连接,所述丝杆的一端与固定块的左侧转动连接,所述丝杆的表面通过丝杆螺母螺纹连接有移动板,所述移动板的顶端固定安装有竖板,所述竖板的表面均匀的固定安装有三个横板,三个所述横板的一侧均固定安装有送餐托板,三个所述送餐托板的一侧固定安装有盖板,所述盖板与送餐车的内壁滑动连接,所述送餐车内壁固定安装有保温棉,三个所述送餐托板底端的中部均固定安装有收集盒,三个所述收集盒的内部均滑动连接有集液板。
3、优选的,三个所述送餐托板内壁的底端均通过两个搭板搭接有漏液板,三个所述送餐托板的表面均开设有与搭板相匹配的搭槽。
4、优选的,三个所述集液板底端的两侧均固定安装有滑条,三个所述收集盒内壁的底端均开设有与滑条相匹配的滑槽。
5、优选的,三个所述集液板的表面均开设有集液槽,三个所述集液板的表面均固定安装有拉帽。
6、优选的,所述移动板的内部滑动连接有导向板,所述导向板的一端与固定块一侧的底部固定连接,所述导向板的另一端与送餐车内壁的左侧固定连接。
7、优选的,所述送餐车底端的四个边角均固定安装有移动走轮。
8、与相关技术相比较,本实用新型提供的智能推车送餐机器人具有如下有益效果:
9、本实用新型提供智能推车送餐机器人,通过设置的正反转电机驱动设置的丝杆进行旋转,配合设置的丝杆螺母以及导向板,进而使得竖板以及三个横杆和三个送餐托板在水平方向进行移动,进而便于带动作用在三个送餐托板处的盖板在水平方向进行移动,进而能够对送餐车的出餐口处进行密封,配合设置的保温棉,进而能够对运送的食物进行隔离以及对菜品的保温,避免空气中的飞虫以及其他杂物会对食物卫生情况造成一定的影响,保证了食物的质量,使用起来更加便捷;
10、此外通过设置的漏液板以及处于漏液板底部的集液板,能够对食物运送过程中洒落的菜汁进行收集,同时通过搭接的漏液板以及滑动连接的集液板,进而便于带动设置的漏液板以及集液板进行取出,便于对其进行清理,使用起来更加便捷。
技术特征:
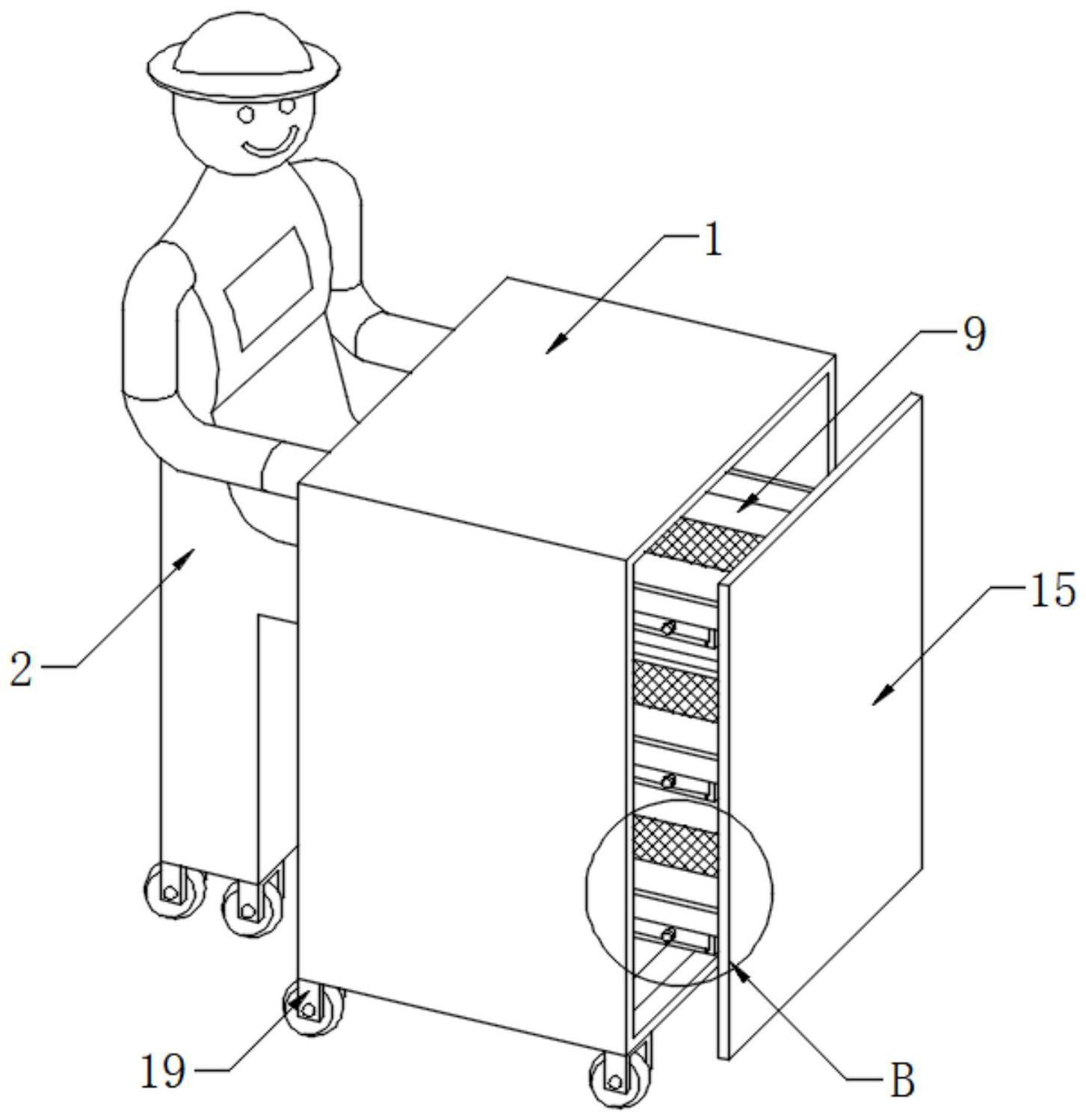
1.智能推车送餐机器人,包括送餐车(1),其特征在于:所述送餐车(1)的一侧设有机器人主体(2),所述送餐车(1)内壁底端的右侧固定安装有固定块(3),所述送餐车(1)一侧的底部固定安装有正反转电机(4),所述正反转电机(4)的传动轴穿过送餐车(1)并与送餐车(1)内部设置的丝杆(5)固定连接,所述丝杆(5)的一端与固定块(3)的左侧转动连接,所述丝杆(5)的表面通过丝杆螺母螺纹连接有移动板(6),所述移动板(6)的顶端固定安装有竖板(7),所述竖板(7)的表面均匀的固定安装有三个横板(8),三个所述横板(8)的一侧均固定安装有送餐托板(9),三个所述送餐托板(9)的一侧固定安装有盖板(15),所述盖板(15)与送餐车(1)的内壁滑动连接,所述送餐车(1)内壁固定安装有保温棉(17),三个所述送餐托板(9)底端的中部均固定安装有收集盒(11),三个所述收集盒(11)的内部均滑动连接有集液板(13)。
2.根据权利要求1所述的智能推车送餐机器人,其特征在于,三个所述送餐托板(9)内壁的底端均通过两个搭板(14)搭接有漏液板(10),三个所述送餐托板(9)的表面均开设有与搭板(14)相匹配的搭槽。
3.根据权利要求1所述的智能推车送餐机器人,其特征在于,三个所述集液板(13)底端的两侧均固定安装有滑条(12),三个所述收集盒(11)内壁的底端均开设有与滑条(12)相匹配的滑槽。
4.根据权利要求1所述的智能推车送餐机器人,其特征在于,三个所述集液板(13)的表面均开设有集液槽,三个所述集液板(13)的表面均固定安装有拉帽(16)。
5.根据权利要求1所述的智能推车送餐机器人,其特征在于,所述移动板(6)的内部滑动连接有导向板(18),所述导向板(18)的一端与固定块(3)一侧的底部固定连接,所述导向板(18)的另一端与送餐车(1)内壁的左侧固定连接。
6.根据权利要求1所述的智能推车送餐机器人,其特征在于,所述送餐车(1)底端的四个边角均固定安装有移动走轮(19)。
技术总结
本技术公开了智能推车送餐机器人,涉及推车送餐机器人技术领域,解决了目前由于出菜口处设置为开口,无法对运送的食物进行隔离以及菜品的保温,而且空气中的飞虫以及其他杂物会对食物卫生情况造成一定的影响的技术问题;包括送餐车,送餐车的一侧设有机器人主体,送餐车内壁底端的右侧固定安装有固定块,送餐车一侧的底部固定安装有正反转电机,正反转电机的传动轴穿过送餐车并与送餐车内部设置的丝杆固定连接,丝杆的一端与固定块的左侧转动连接;本技术具有能够对运送的食物进行隔离以及对菜品的保温,避免空气中的飞虫以及其他杂物会对食物卫生情况造成一定的影响,保证了食物的质量,使用起来更加便捷。
技术研发人员:乘兆峰,孟波,张群
受保护的技术使用者:武汉捷顺互联网科技有限公司
技术研发日:20230627
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!