一种自动化夹取机构的制作方法
本技术涉及夹爪,具体涉及一种自动化夹取机构。
背景技术:
1、机器人夹爪被广泛应用于零件分拣、零件移动等工业装配线中,可以在结构环境或非结构环境下实现对目标的移动操作。
2、目前机器人夹爪分为两指夹爪与三指夹爪,相比于两指夹爪来说,三指夹爪所需的稳定性要求更高,需要保证三个夹指进行同步活动;而目前的三指夹爪大多通过连杆机构实现三个夹指的联动,但是目前三指夹爪的联动机构缺少导向部件,使得三指夹爪的稳定性较差。
技术实现思路
1、本实用新型的目的是针对现有技术中的上述不足,提供了一种自动化夹取机构,能够加强夹取机构的稳定性。
2、本实用新型的目的通过以下技术方案实现:一种自动化夹取机构,包括外壳以及电机;所述外壳内设有活动腔;所述活动腔内转动设有丝杠;所述电机的输出端与丝杠连接;所述活动腔内活动设有活动块;所述活动块与丝杠螺纹连接;
3、所述外壳设有三个与活动腔连通的导向槽;所述活动块设有三个等高设置的驱动杆;所述外壳的顶部铰接设有三个夹爪;
4、所述自动化夹取机构还包括三个连杆;
5、每个驱动杆的一端分别设于活动腔内并与活动块连接;每个驱动杆的另一端分别通过导向槽凸伸出活动腔后与其中一个连杆的一端铰接;所述连杆的另一端与其中一个夹爪铰接。
6、本实用新型进一步设置为,所述电机设有外壳的底部;所述电机与外壳可拆卸连接。
7、本实用新型进一步设置为,所述外壳的顶部设有三个等高设置的铰接座;三个夹爪的中部分别铰接设于三个铰接座上。
8、本实用新型进一步设置为,所述夹爪的一端与连杆的另一端铰接;所述夹爪的另一端设有夹持块。
9、本实用新型进一步设置为,所述夹持块通过螺栓与夹爪可拆卸连接。
10、本实用新型进一步设置为,所述活动腔内设有滑杆;所述活动块设有与滑杆滑动连接的滑块。
11、本实用新型进一步设置为,所述活动腔内设有与丝杠螺纹连接的螺母;所述螺母与活动块可拆卸连接。
12、本实用新型进一步设置为,三个驱动杆以丝杠为中心等角度设置。
13、本实用新型的有益效果:本实用新型通过设置三个导向槽以及三个等高的驱动杆,使得活动块能够进行稳定地升降,使得三个驱动杆同步进行升降,从而使得三个夹爪能够同步工作,保证夹取机构的稳定性。
技术特征:
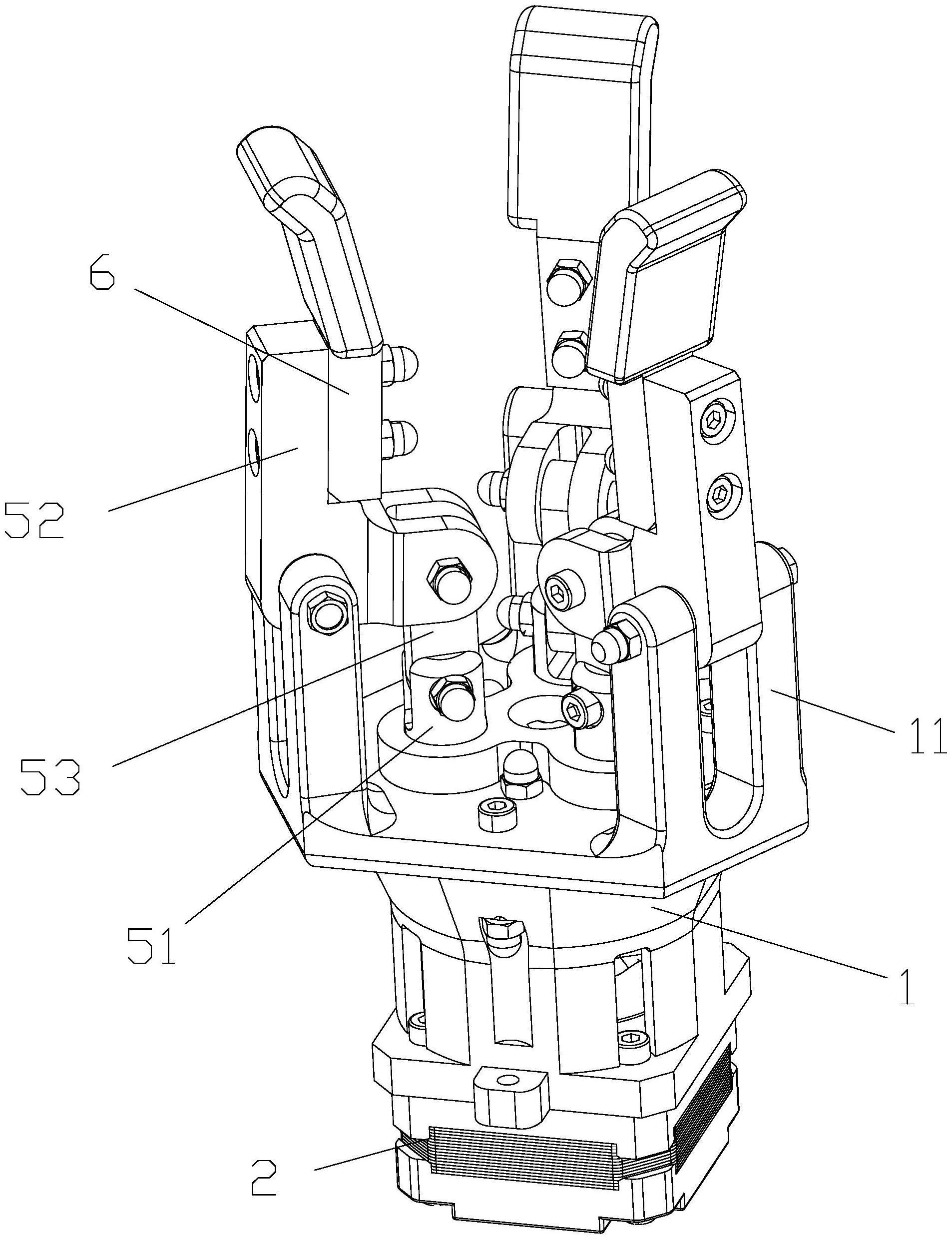
1.一种自动化夹取机构,其特征在于:包括外壳(1)以及电机(2);所述外壳(1)内设有活动腔(3);所述活动腔(3)内转动设有丝杠(4);所述电机(2)的输出端与丝杠(4)连接;所述活动腔(3)内活动设有活动块(5);所述活动块(5)与丝杠(4)螺纹连接;
2.根据权利要求1所述的一种自动化夹取机构,其特征在于:所述电机(2)设有外壳(1)的底部;所述电机(2)与外壳(1)可拆卸连接。
3.根据权利要求1所述的一种自动化夹取机构,其特征在于:所述外壳(1)的顶部设有三个等高设置的铰接座(11);三个夹爪(52)的中部分别铰接设于三个铰接座(11)上。
4.根据权利要求1所述的一种自动化夹取机构,其特征在于:所述夹爪(52)的一端与连杆(53)的另一端铰接;所述夹爪(52)的另一端设有夹持块(6)。
5.根据权利要求4所述的一种自动化夹取机构,其特征在于:所述夹持块(6)通过螺栓与夹爪(52)可拆卸连接。
6.根据权利要求1所述的一种自动化夹取机构,其特征在于:所述活动腔(3)内设有滑杆(71);所述活动块(5)设有与滑杆(71)滑动连接的滑块(72)。
7.根据权利要求1所述的一种自动化夹取机构,其特征在于:所述活动腔(3)内设有与丝杠(4)螺纹连接的螺母(8);所述螺母(8)与活动块(5)可拆卸连接。
8.根据权利要求1所述的一种自动化夹取机构,其特征在于:三个驱动杆(51)以丝杠(4)为中心等角度设置。
技术总结
本技术涉及夹爪技术领域,具体涉及一种自动化夹取机构,包括外壳以及电机;所述外壳内设有活动腔;所述活动腔内转动设有丝杠;所述电机的输出端与丝杠连接;所述活动腔内活动设有活动块;所述活动块与丝杠螺纹连接;所述外壳设有三个导向槽;所述活动块设有三个驱动杆;所述外壳的顶部铰接设有三个夹爪;还包括三个连杆;每个驱动杆的一端分别与活动块连接;每个驱动杆的另一端分别与其中一个连杆的一端铰接;所述连杆的另一端与其中一个夹爪铰接。本技术通过设置三个导向槽以及三个等高的驱动杆,使得活动块能够进行稳定地升降,使得三个驱动杆同步进行升降,从而使得三个夹爪能够同步工作,保证夹取机构的稳定性。
技术研发人员:许乃志,刘玉国,程向前,杨国庆
受保护的技术使用者:东莞市先领电源有限公司
技术研发日:20230703
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!