一种机械零部件抓取机械手结构
本技术涉及机械手,具体为一种机械零部件抓取机械手结构。
背景技术:
1、随着自动化技术的发展,在工业生产当中,机械手的使用越来越普遍,在机械零部件的生产加工过程中,需要将机械零部件在不同的加工工序段中转运,机械手可以代替人工来抓取、移动工件,大大节省了人力,提高了生产力,但是现有技术中,有的机械手仅仅具有拿取、移动工件的功能,而对于有的工件转运时,需要根据生产工序调整工件的摆放角度,这就还需要人工调整,较为麻烦;而且对于不同的工件,机械手通常不能普遍适用,适用性较低,需要进行改进。
技术实现思路
1、本实用新型的目的在于提供一种机械零部件抓取机械手结构,以解决上述背景技术中提出的问题。
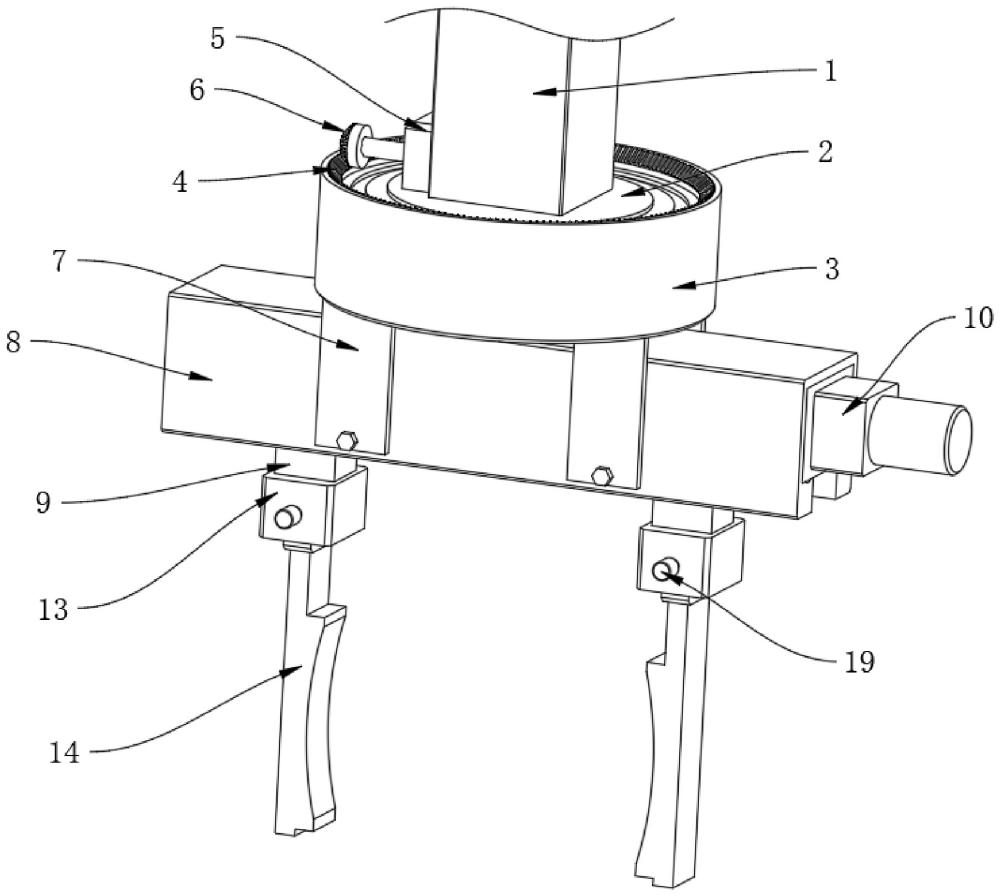
2、为实现上述目的,本实用新型提供如下技术方案:一种机械零部件抓取机械手结构,包括有机械臂,所述机械臂的底部设置有连接盘,所述连接盘连接有连接框,所述连接框的底部设置有数块固定板,所述固定板固定连接有移动轨道,所述移动轨道内滑动设置有两块滑块,所述滑块底部连接有安装块,所述安装块连接有便于更换的机械夹指。
3、优选的,所述连接盘和连接框之间通过轴承转动连接,连接盘固定在轴承的内圈中,轴承的外圈固定在连接框的内壁上。
4、优选的,所述连接框的顶部设置有环形齿条,机械臂上安装有第一电机,所述第一电机的输出端连接有驱动齿轮,驱动齿轮和环形齿条啮合连接。
5、优选的,所述两块滑块对称设置,滑块为t型结构,滑块的中间设置有螺纹筒,在移动轨道的一端侧壁上安装有第二电机,第二电机的输出端连接有内轴,内轴上设置有两段螺纹杆,螺纹杆分别和两块滑块上的螺纹筒配合连接。
6、优选的,所述机械夹指的顶端设置有对接块,对接块插接在安装块底面的插槽中,在插槽的两侧设置有空腔,空腔中活动设置有侧板,侧板的一侧设置有数个定位柱,定位柱插接在对接块侧壁上的定位孔中,侧板的另一侧壁上连接有数个顶紧弹簧。
7、优选的,所述安装块的一侧壁上活动插接有拉杆,拉杆和侧板之间连接有牵引带。
8、与现有技术相比,本实用新型的有益效果是:
9、1.本实用新型提出的一种机械零部件抓取机械手结构,在设备使用的时候,机械臂可将设备移动到指定地点,夹取机械零部件的时候,第二电机启动带动内轴和螺纹杆转动,进而使得两端的滑块向中间移动,进而使得机械夹指将机械零部件夹取,当移动至指定位置后,第二电机反转即可松开机械零部件,在转运过程中,通过控制启动第一电机带动驱动齿轮转动,驱动齿轮和环形齿条啮合连接可使得连接框带动下方结构转动一定角度,进而控制机械零部件放置时的摆放角度,自动化程度高,更加方便;
10、2.当夹取不同的机械零部件时,只需要更换对应型号的机械夹指即可,拆卸时,先将拉杆外拉,通过牵引带拉动侧板,使得定位柱从定位孔中移出,然后将对接块从插槽中取出即可,然后安装时,将对接块插入插槽中,顶紧弹簧可推动侧板,进而使得定位柱插接进定位孔中,即可完成更换,操作简单,装置适用性更高。
技术特征:
1.一种机械零部件抓取机械手结构,包括有机械臂(1),其特征在于:所述机械臂(1)的底部设置有连接盘(2),所述连接盘(2)连接有连接框(3),所述连接框(3)的底部设置有数块固定板(7),所述固定板(7)固定连接有移动轨道(8),所述移动轨道(8)内滑动设置有两块滑块(9),所述滑块(9)底部连接有安装块(13),所述安装块(13)连接有便于更换的机械夹指(14)。
2.根据权利要求1所述的一种机械零部件抓取机械手结构,其特征在于:所述连接盘(2)和连接框(3)之间通过轴承转动连接,连接盘(2)固定在轴承的内圈中,轴承的外圈固定在连接框(3)的内壁上。
3.根据权利要求1所述的一种机械零部件抓取机械手结构,其特征在于:所述连接框(3)的顶部设置有环形齿条(4),机械臂(1)上安装有第一电机(5),所述第一电机(5)的输出端连接有驱动齿轮(6),驱动齿轮(6)和环形齿条(4)啮合连接。
4.根据权利要求1所述的一种机械零部件抓取机械手结构,其特征在于:所述两块滑块(9)对称设置,滑块(9)为t型结构,滑块(9)的中间设置有螺纹筒,在移动轨道(8)的一端侧壁上安装有第二电机(10),第二电机(10)的输出端连接有内轴(11),内轴(11)上设置有两段螺纹杆(12),螺纹杆(12)分别和两块滑块(9)上的螺纹筒配合连接。
5.根据权利要求1所述的一种机械零部件抓取机械手结构,其特征在于:所述机械夹指(14)的顶端设置有对接块(15),对接块(15)插接在安装块(13)底面的插槽中,在插槽的两侧设置有空腔,空腔中活动设置有侧板(16),侧板(16)的一侧设置有数个定位柱(18),定位柱(18)插接在对接块(15)侧壁上的定位孔中,侧板(16)的另一侧壁上连接有数个顶紧弹簧(17)。
6.根据权利要求1所述的一种机械零部件抓取机械手结构,其特征在于:所述安装块(13)的一侧壁上活动插接有拉杆(19),拉杆(19)和侧板(16)之间连接有牵引带(20)。
技术总结
本技术涉及机械手技术领域,具体为一种机械零部件抓取机械手结构,包括有机械臂,机械臂的底部设置有连接盘,连接盘连接有连接框,连接框的底部设置有数块固定板,固定板固定连接有移动轨道,移动轨道内滑动设置有两块滑块。在设备使用的时候,机械臂可将设备移动到指定地点,夹取机械零部件的时候,第二电机启动带动内轴和螺纹杆转动,进而使得两端的滑块向中间移动,进而使得机械夹指将机械零部件夹取,当移动至指定位置后,第二电机反转即可松开机械零部件,在转运过程中,通过控制启动第一电机带动驱动齿轮转动,可使得连接框带动下方结构转动一定角度,进而控制机械零部件放置时的摆放角度,自动化程度高,更加方便。
技术研发人员:谭雪友,王海娇,陈韶飞
受保护的技术使用者:广西科技大学
技术研发日:20230704
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!