一种化纤生产用自动化控制机器人的制作方法
本技术属于化纤生产,特别是涉及一种化纤生产用自动化控制机器人。
背景技术:
1、化学纤维是用天然高分子化合物或人工合成的高分子化合物为原料,经过制备纺丝原液、纺丝和后处理等工序制得的具有纺织性能的纤维。纤维的长短、粗细、白度、光泽等性质可以在生产过程中加以调节。并分别具有耐光、耐磨、易洗易干、不霉烂、不被虫蛀等优点。广泛用于制造衣着织物、滤布、运输带、水龙带、绳索、渔网、电绝缘线、医疗缝线、轮胎帘子布和降落伞等。一般可将高分子化合物制成溶液或熔体,从喷丝头细孔中压出,再经凝固而成纤维。产品可以是连绵不断的长丝、截成一定长度的短纤维或未经切断的丝束等,纺织行业是劳动密集型产业,传统的资源消耗以及劳动力持续投入发展模式已经难以为继,自动化、智能化将成为改造传统纺织产业、推进产业转型升级的有效途径,尤其是近几年在招工难、用工成本高企的背景下,不少企业开始通过机器换人来实现减员增效,不仅有效解决了用工缺乏,缓解了劳动力成本持续上涨带来的压力,而且显著提高了生产效率,从而增大盈利空间。
2、现有的夹紧是用硬接触的方式对化纤丝饼进行夹持,容易对其表面造成损伤,并且由于只能对同一类型的丝饼进行夹持,大大降低了装置的适用性,使工作变得繁琐。
技术实现思路
1、本实用新型的目的在于提供一种化纤生产用自动化控制机器人,通过,解决了现有的问题。
2、为解决上述技术问题,本实用新型是通过以下技术方案实现的:
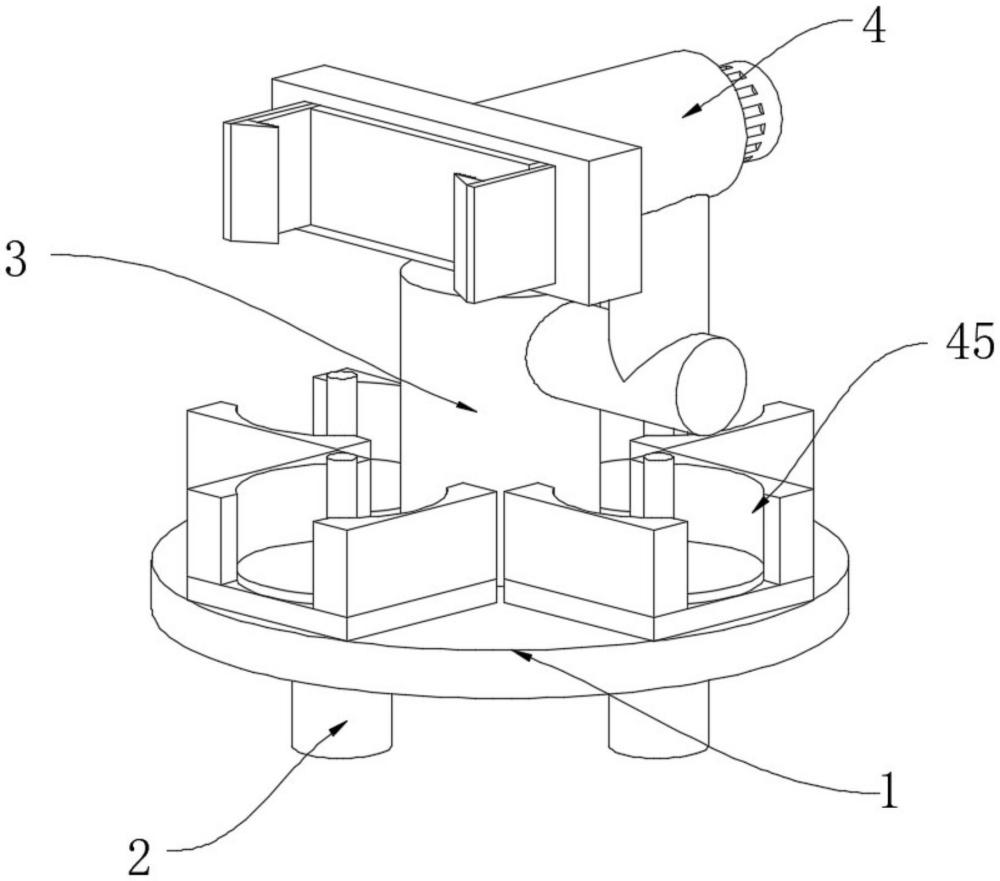
3、本实用新型为一种化纤生产用自动化控制机器人,包括底板,所述底板的底部四周均固定连接有桌脚,所述底板的顶部中心处固定连接有机械臂,还包括,抓取清理机构,所述抓取清理机构包括固定连接在机械臂远离底板一端的连接柱,所述连接柱的一端固定连接有气泵,所述连接柱的一端设置有承载组件,所述气泵的一侧固定连接有气管。
4、进一步地,所述承载组件包括固定连接在连接柱远离气泵一端的连接块,所述连接块的一侧开设有放置槽,所述气管的一端贯穿连接块并延伸至放置槽的内部,所述放置槽的内壁一侧中心处固定连接有气囊,这样设置的目的防止丝饼筒受到损伤。
5、进一步地,所述气囊的一端与气管的一端固定连接,所述放置槽的内壁两端分别固定连接有若干个挤压簧,这样设置的目的是能够进行挤压夹取,所述挤压簧的一端设置有夹取组件。
6、进一步地,所述夹取组件包括固定连接在挤压簧一端的夹取板,所述夹取板远离挤压簧的一侧固定连接有海绵板,所述夹取板靠近海绵板的一侧固定连接有斜板,这样设置的目的是防止丝饼筒的掉落,所述斜板的一侧固定连接有三角竖块。
7、进一步地,所述海绵板远离夹取板的一侧与气囊的一侧活动连接,所述气囊的两侧分别固定连接有若干个放气管,所述放气管的一端贯穿海绵板并延伸至海绵板的外部。
8、进一步地,所述底板的顶部设置有固定组件,所述固定组件包括固定连接在底板顶部四周的承载板,所述承载板的顶部固定连接有海绵圆板,所述海绵圆板的顶部贯穿并固定连接有立柱,这样设置的目的增强丝饼筒的固定,所述立柱的底部与承载板的顶部固定连接,所述承载板的顶部两侧均固定连接有挡板。
9、本实用新型具有以下有益效果:
10、1、本实用新型,当进行工作的时候,启动机械臂,机械臂带动连接柱进行移动,启动气泵,气泵向设置的气管内部进行排气,气流通过气管移动至气囊内部,使气囊膨胀,膨胀的气囊对海绵板进行推动,海绵板带动夹取板进行移动,夹取板带动斜板进行移动,斜板带动三角竖块进行移动,当移动至丝饼筒处时,关闭气泵,气囊逐渐排气,通过设置的放气管对夹持的丝饼筒外壁进行清理浮灰,从而减轻了工作人员的工作负担。
11、2、本实用新型,气囊排气,被挤压的挤压簧对夹取板进行挤压,使夹取板进行移动,从而能使海绵板对丝饼筒进行夹持,因为海绵板与气囊的设置,能够使夹持过程中的丝饼筒减少受到的损伤,提高了丝饼筒的质量,因为夹取板可以左右移动,从而可以对不同规格的丝饼筒进行夹持,提高了装置的适用性,通过设置的三角竖块与斜板,减少了转移过程中的掉落几率。
12、当然,实施本实用新型的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:
1.一种化纤生产用自动化控制机器人,包括底板(1),其特征在于:所述底板(1)的底部四周均固定连接有桌脚(2),所述底板(1)的顶部中心处固定连接有机械臂(3),还包括;
2.根据权利要求1所述的一种化纤生产用自动化控制机器人,其特征在于,所述承载组件(43)包括固定连接在连接柱(42)远离气泵(41)一端的连接块(431),所述连接块(431)的一侧开设有放置槽(432),所述气管(47)的一端贯穿连接块(431)并延伸至放置槽(432)的内部,所述放置槽(432)的内壁一侧中心处固定连接有气囊(434)。
3.根据权利要求2所述的一种化纤生产用自动化控制机器人,其特征在于,所述气囊(434)的一端与气管(47)的一端固定连接,所述放置槽(432)的内壁两端分别固定连接有若干个挤压簧(433),所述挤压簧(433)的一端设置有夹取组件(44)。
4.根据权利要求3所述的一种化纤生产用自动化控制机器人,其特征在于,所述夹取组件(44)包括固定连接在挤压簧(433)一端的夹取板(441),所述夹取板(441)远离挤压簧(433)的一侧固定连接有海绵板(442),所述夹取板(441)靠近海绵板(442)的一侧固定连接有斜板(444),所述斜板(444)的一侧固定连接有三角竖块(445)。
5.根据权利要求4所述的一种化纤生产用自动化控制机器人,其特征在于,所述海绵板(442)远离夹取板(441)的一侧与气囊(434)的一侧活动连接,所述气囊(434)的两侧分别固定连接有若干个放气管(443),所述放气管(443)的一端贯穿海绵板(442)并延伸至海绵板(442)的外部。
6.根据权利要求5所述的一种化纤生产用自动化控制机器人,其特征在于,所述底板(1)的顶部设置有固定组件(45),所述固定组件(45)包括固定连接在底板(1)顶部四周的承载板(451),所述承载板(451)的顶部固定连接有海绵圆板(453),所述海绵圆板(453)的顶部贯穿并固定连接有立柱(452),所述立柱(452)的底部与承载板(451)的顶部固定连接,所述承载板(451)的顶部两侧均固定连接有挡板(454)。
技术总结
本技术公开了一种化纤生产用自动化控制机器人,涉及化纤生产技术领域。本技术包括底板,所述底板的底部四周均固定连接有桌脚,所述底板的顶部中心处固定连接有机械臂,当进行工作的时候,启动机械臂,机械臂带动连接柱进行移动,启动气泵,气泵向设置的气管内部进行排气,气流通过气管移动至气囊内部,使气囊膨胀,膨胀的气囊对海绵板进行推动,海绵板带动夹取板进行移动,夹取板带动斜板进行移动,斜板带动三角竖块进行移动,当移动至丝饼筒处时,关闭气泵,气囊逐渐排气,通过设置的放气管对夹持的丝饼筒外壁进行清理浮灰,从而减轻了工作人员的工作负担。
技术研发人员:常亮
受保护的技术使用者:温州坤格自动化科技有限公司
技术研发日:20230706
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!