光伏机器人的制作方法
本公开涉及一种光伏机器人。
背景技术:
1、目前,大部分在用太阳能电池板只能依靠人工定期完成清洁工作。由于大型电站的太阳能电池板体积大,同时使用的电池板数量多,所处环境恶劣,通常布置在宽阔无遮挡环境下,灰尘会反复积累,需要反复清洗。在很多场合,为了提高空间利用率,太阳能电池板通过安装框架设置在高处,这使得清洁更加困难,风险更大。为了降低清洁成本,许多太阳能电池板的用户不得不选择不进行清洁或者靠自然降雨被动清洁,因此不得不承受灰尘带来的电力损失。
2、目前已经有一些太阳能电池板引入了自动光伏机器人,其采用整体化设计。首先,由于光伏机器人的各个组件集成在一起,整体化设计可能导致更换或维修特定组件变得更加困难。如果出现故障或需要更新某个组件,可能需要拆解整个机器人,这将增加维修时间和工作量,降低维护的效率。其次,整体化设计可能限制了光伏机器人的灵活性和可升级性。由于各个组件之间紧密耦合,更换或升级某个组件可能需要对整个系统进行调整或重新设计。这可能涉及到改变机器人的整体结构或重新安装其他部件,增加了复杂性和成本。相比之下,模块化设计更容易实现部件的单独升级和替换,提供了更大的灵活性和可扩展性。此外,整体化设计可能增加了光伏机器人的维护成本。由于组件之间的紧密耦合,如果一个组件发生故障或需要更换,可能需要更换整个系统或进行大规模的调整。这不仅增加了维修费用,还可能导致较长的停机时间和生产中断。
技术实现思路
1、为了解决上述技术问题之一,本公开提供了一种光伏机器人。
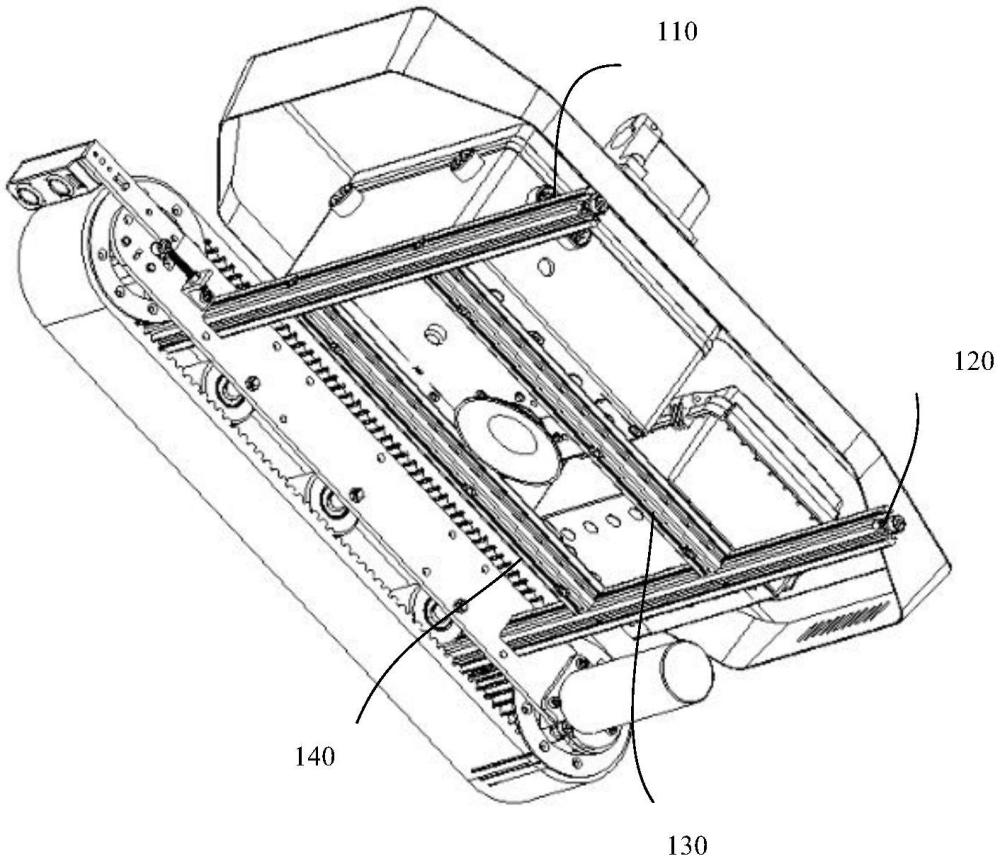
2、根据本公开的一个方面,提供一种光伏机器人,包括:
3、主体框架;
4、设在主体框架上的多个驱动模块,每个驱动模块包括:
5、驱动模块托架;
6、可旋转地连接到框架上的轮子;以及
7、由驱动模块托架携带的轮子驱动马达,可用于驱动该轮子;以及设置于所述轮子外侧的环形带,用于在所述轮子的带动下驱动所述光伏机器人穿越光伏面板上的地形;
8、以及
9、设在驱动模块托架上的清洁模块,该清洁模块包括:
10、清洁模块托架,所述清洁模块托架可摆动地连接在所述驱动模块托架外侧;
11、可旋转地连接到清洁模块托架的清洁头;以及
12、由清洁模块托架携带的、可操作地驱动清洁头的清洁驱动电机;
13、其中,所述清洁模块可独立地从主体框架上拆卸下来,所述驱动轮组件依附于所述清洁模块的拆卸从主体框架上可替换地拆卸下来。
14、根据本公开的至少一个实施方式的光伏机器人,所述清洁模块托架连接于所述驱动模块托架外侧。
15、根据本公开的至少一个实施方式的光伏机器人,所述清洁模块托架进一步包括摆动连接器,该摆动连接器设置在清洁模块托架的远端,当清洁模块托架被放置在驱动模块托架外侧时,该摆动连接器被配置为与所述清洁模块托架的连接件相匹配,以形成与所述驱动轮组件的摆动连接。
16、根据本公开的至少一个实施方式的光伏机器人,所述摆动连接器包括位于所述远端上的枢转槽和摆动槽,所述连接件包括分别与所述枢转槽和摆动槽匹配的摆动轴和枢转轴,该摆动连接器被配置为与所述清洁模块托架的连接件相匹配。
17、根据本公开的至少一个实施方式的光伏机器人,驱动模块托架包括固定在摆动连接器外部的可拆卸的盖子,该盖子将驱动模块和清洁模块固定在主体框架内,所述摆动连接器位于所述驱动轮护板和所述驱动模块托架之间。
18、根据本公开的至少一个实施方式的光伏机器人,所述清洁模块进一步包括电源连接器,该连接器设置在清洁模块托架的外表面,当清洁模块被放置在驱动模块托架时,该连接器被配置为与主体框架电源连接器相匹配,以建立与清洁模块的电力连接。
19、根据本公开的至少一个实施方式的光伏机器人,所述驱动轮组件进一步包括电源连接器,该连接器设置在驱动模块托架的外表面,当驱动轮组件被放置在主体框架时,该连接器被配置为与主体框架电源连接器相匹配,以建立与驱动轮组件的电力连接。
20、根据本公开的至少一个实施方式的光伏机器人,每个驱动轮组件进一步包括至少接近传感器,以检测邻近光伏面板的缺失。
21、根据本公开的至少一个实施方式的光伏机器人,还包括由主体框架携带的供应系统,用于将清洁液分配到所述光伏面板表面。
22、根据本公开的至少一个实施方式的光伏机器人,所述供应系统包括分配管道、喷嘴,在所述光伏机器人工作过程中,清洁液体通过喷嘴被提供至所述清洁模块的前方。
技术特征:
1.一种光伏机器人,其特征在于,包括:
2.如权利要求1所述的光伏机器人,其特征在于,所述清洁模块托架连接于所述驱动模块托架外侧。
3.如权利要求2所述的光伏机器人,其特征在于,所述清洁模块托架进一步包括摆动连接器,该摆动连接器设置在清洁模块托架的远端,当清洁模块托架被放置在驱动模块托架外侧时,该摆动连接器被配置为与所述清洁模块托架的连接件相匹配,以形成与所述驱动模块的摆动连接。
4.如权利要求3所述的光伏机器人,其特征在于,所述摆动连接器包括位于所述远端上的枢转槽和摆动槽,所述连接件包括分别与所述枢转槽和摆动槽匹配的摆动轴和枢转轴。
5.如权利要求4所述的光伏机器人,其特征在于,驱动模块托架包括固定在摆动连接器外部的可拆卸的盖子,该盖子将驱动模块和清洁模块固定在主体框架内,所述摆动连接器位于所述驱动轮的护板和所述驱动模块托架之间。
6.如权利要求1所述的光伏机器人,其特征在于,所述清洁模块进一步包括电源连接器,该连接器设置在清洁模块托架的外表面,当清洁模块被放置在驱动模块托架时,该连接器被配置为与主体框架电源连接器相匹配,以建立与清洁模块的电力连接。
7.如权利要求1所述的光伏机器人,其特征在于,所述驱动模块进一步包括电源连接器,该连接器设置在驱动模块托架的外表面,当驱动模块被放置在主体框架时,该连接器被配置为与主体框架电源连接器相匹配,以建立与驱动模块的电力连接。
8.如权利要求1所述的光伏机器人,其特征在于,每个驱动模块进一步包括至少接近传感器,以检测邻近光伏面板的缺失。
9.根据权利要求1所述的光伏机器人,其特征在于,还包括:
10.根据权利要求9所述的光伏机器人,其特征在于,
技术总结
本公开提供一种光伏机器人,包括主体框架;设在主体框架上的多个驱动模块,每个驱动模块包括驱动模块托架;以及设在驱动模块托架上的清洁模块;所述清洁模块可独立地从主体框架上拆卸下来,所述驱动模块依附于所述清洁模块的拆卸从主体框架上可替换地拆卸下来。
技术研发人员:金璐丰,李嘉旗,张杭,杨俊,唐成
受保护的技术使用者:杭州大造机器人科技有限公司
技术研发日:20230706
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!