一种多轴机械臂的制作方法
本技术涉及机械臂,具体是一种多轴机械臂。
背景技术:
1、机械臂可以极大提高生产效率,稳定和提高产品质量,改善工人劳动条件,提高工业生产机械化和自动化程度。
2、在专利中(专利号:cn212763549u)公开了一种多轴机械臂,包括固定壳和电机,所述固定壳的下端卡合连接有夹块,且夹块的上端贯穿连接有双向螺杆,所述双向螺杆转动连接在固定壳的下端,且固定壳的上端转动连接有第一连接壳,所述第一连接壳的下端转动连接有第二连接壳,所述齿轮的外表面啮合连接有链条,所述第一连接壳的左表面铰链连接有调节杆,所述固定壳的中部通过螺栓固定连接有电机,所述第二连接壳的左端固定安装有电动伸缩杆,所述夹持装置的右端内部贯穿连接有限位杆。该多轴机械臂,在工作时方便调节长度与角度,避免工作受到局限,以及方便牢固的夹持物件,避免脱落,影响使用,同时也方便对机械臂进行安装在不同的位置。
3、但是上述公开专利中的转动连接结构链条需要保养否则可能造成生锈造成转动时卡住等,未考虑机械臂转动时的转动惯量对机械臂使用寿命的影响,机械臂在对指定位置物品进行抓取无定位装置需人工进行操作,造成人工成本的浪费。因此,现在提出一种自动定位可及时控制变速的多轴机械臂装置。
技术实现思路
1、本实用新型的目的在于提供一种多轴机械臂,以解决上述背景技术中提出的机械臂问题。
2、为实现上述目的,本实用新型提供如下技术方案:
3、一种多轴机械臂,包括地轨,所述地轨前端设有齿轮齿条组,所述地轨上滑动连接有支撑板,所述齿轮齿条组的齿条部分与支撑板相对滑动连接,所述支撑板顶部前端固定连接有定位器,所述支撑板顶部中心位置固定连接有箱体,所述箱体内底部位置固定连接有第一伺服电机,所述第一伺服电机输出端固定连接有主动轮,所述第一伺服电机左侧设有连接座,连接座底部与箱体固定连接,所述连接座顶部转动连接有从动轮,所述从动轮顶部固定连接有转动盘,所述转动盘顶部固定连接有底座,所述底座顶部中心位置固定连接有减速电机。
4、作为本实用新型再进一步的方案:其中,所述地轨前后两端均固定连接有均匀分布的支撑块,支撑块底部固定连接有电动升降柱。
5、作为本实用新型再进一步的方案:其中,所述主动轮与从动轮之间相互啮合。
6、作为本实用新型再进一步的方案:其中,所述减速电机输出端固定连接有第一连接臂,所述第一连接臂一端转动连接有第二连接臂,所述第一连接臂与第二连接臂之间设有第一气缸。
7、作为本实用新型再进一步的方案:其中,所述第二连接臂一端固定连接有第二伺服电机,所述伺服电机输出端贯穿第二连接臂前端并固定连接有连接杆。
8、作为本实用新型再进一步的方案:其中,所述连接杆一端贯穿并固定连接有第一夹臂,所述连接杆一端贯穿并转动连接有第二夹臂。
9、作为本实用新型再进一步的方案:其中,所述第一夹臂与第二夹臂之间设有第二气缸。
10、与现有技术相比,本实用新型的有益效果是:
11、本实施例中的定位装置,通过地轨和齿轮齿条组来实现机械臂的左右移动,通过安装定位器其为电-气阀门定位器,电动控制器的输出信号变为气信号去驱动气动执行器,可用电动控制器输出的信号去操纵气动执行机构;还具有气动阀门定位器的作用,可以使阀门位置按控制器送来的信号准确定位,使机械臂对指定位置物品精准定位来控制抓取。
12、加上减速电机和齿轮传动的使用可以降低转动惯量,一般是速比的平方降低,能及时的控制机械臂的起停、变速。
技术特征:
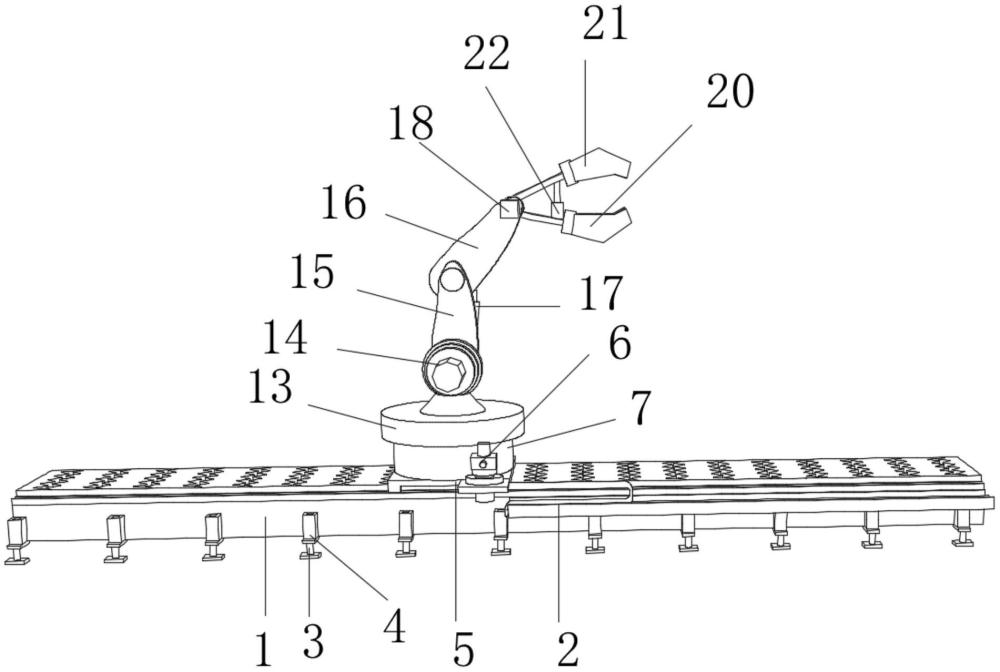
1.一种多轴机械臂,包括地轨(1),其特征在于,所述地轨(1)前端设有齿轮齿条组(2),所述地轨(1)上滑动连接有支撑板(5),所述齿轮齿条组(2)的齿条部分与支撑板(5)相对滑动连接,所述支撑板(5)顶部前端固定连接有定位器(6),所述支撑板(5)顶部中心位置固定连接有箱体(7),所述箱体(7)内底部位置固定连接有第一伺服电机(8),所述第一伺服电机(8)输出端固定连接有主动轮(9),所述第一伺服电机(8)左侧设有连接座(10),连接座(10)底部与箱体(7)固定连接,所述连接座(10)顶部转动连接有从动轮(11),所述从动轮(11)顶部固定连接有转动盘(12),所述转动盘(12)顶部固定连接有底座(13),所述底座(13)顶部中心位置固定连接有减速电机(14)。
2.根据权利要求1所述的多轴机械臂,其特征在于,所述地轨(1)前后两端均固定连接有均匀分布的支撑块(4),支撑块(4)底部固定连接有电动升降柱(3)。
3.根据权利要求1所述的多轴机械臂,其特征在于,所述主动轮(9)与从动轮(11)之间相互啮合。
4.根据权利要求1所述的多轴机械臂,其特征在于,所述减速电机(14)输出端固定连接有第一连接臂(15),所述第一连接臂(15)一端转动连接有第二连接臂(16),所述第一连接臂(15)与第二连接臂(16)之间设有第一气缸(17)。
5.根据权利要求4所述的多轴机械臂,其特征在于,所述第二连接臂(16)一端固定连接有第二伺服电机(18),所述第二伺服电机(18)输出端贯穿第二连接臂(16)前端并固定连接有连接杆(19)。
6.根据权利要求5所述的多轴机械臂,其特征在于,所述连接杆(19)一端贯穿并固定连接有第一夹臂(20),所述连接杆(19)一端贯穿并转动连接有第二夹臂(21)。
7.根据权利要求6所述的多轴机械臂,其特征在于,所述第一夹臂(20)与第二夹臂(21)之间设有第二气缸(22)。
技术总结
本技术公开了一种多轴机械臂,属于机械臂技术领域,包括地轨,所述地轨前端设有齿轮齿条组,所述地轨上滑动连接有支撑板,所述齿轮齿条组的齿条部分与支撑板相对滑动连接,所述支撑板顶部前端固定连接有定位器,所述支撑板顶部中心位置固定连接有箱体,所述箱体内底部位置固定连接有第一伺服电机,所述第一伺服电机输出端固定连接有主动轮,所述第一伺服电机左侧设有连接座,所述连接座顶部转动连接有从动轮,所述从动轮顶部固定连接有转动盘,所述转动盘顶部固定连接有底座,所述底座顶部中心位置固定连接有减速电机。通过地轨和齿轮齿条组来实现机械臂的左右移动,通过安装定位器(电‑气阀门定位器)使机械臂对指定位置物品精准定位。
技术研发人员:张汉明,农色兵,唐兰花,黄创
受保护的技术使用者:桂林海纳科技有限公司
技术研发日:20230706
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!