一种真空吸附机构及下料机器人的制作方法
本技术涉及玻璃抓取,尤其涉及一种真空吸附机构及下料机器人。
背景技术:
1、玻璃在下料作业时,下料机器人通常采用机械手根据玻璃尺寸大小装配对应的真空吸附机构进行抓取下料。由于现有的真空吸附机构吸附功能单一,使得下料机器人难以实现在一条生产线上抓取多种尺寸的玻璃。
技术实现思路
1、本实用新型所要解决的技术问题是:提供一种真空吸附机构及下料机器人,以实现多种尺寸玻璃的抓取。
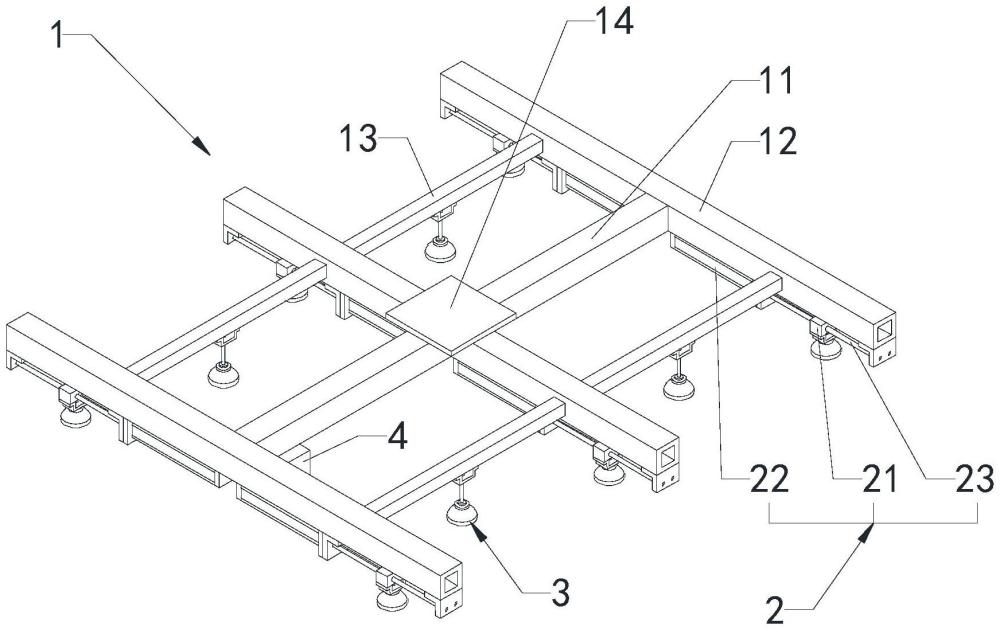
2、为了解决上述技术问题,本实用新型采用的技术方案为:一种真空吸附机构,包括支架、滑动组件和吸盘组件;
3、所述支架的一侧具有吸附面;所述滑动组件包括滑动设置在所述支架上的滑块,所述吸盘组件设置在滑块上,且所述滑块上的吸盘组件的吸附端设置在所述吸附面上。
4、进一步的,所述滑动组件还包括驱动件,所述驱动件的活动端与滑块连接。
5、进一步的,所述滑动组件还包括滑杆,所述滑块滑动设置在滑杆上,所述驱动件的活动端的活动方向与滑杆的长度方向平行。
6、进一步的,所述支架包括纵梁和至少两个设置在纵梁上的横梁;所述滑动组件设置在横梁。
7、进一步的,所述横梁上有至少两个相对设置或者相背设置的滑动组件。
8、进一步的,所述支架还包括副梁,所述吸盘组件设置在副梁上,且所述副梁上的吸盘组件的吸附端设置在所述吸附面上。
9、进一步的,所述支架上设置有安装座。
10、进一步的,上述一种真空吸附机构还包括设置在支架上的真空发生器,所述真空发生器与吸盘组件的吸附端之间由软管连通。
11、进一步的,所述吸盘组件包括固定座和设置在固定座上的吸盘。
12、为了解决上述技术问题,本实用新型采用的另一个技术方案为:
13、一种下料机器人,所述下料机器人包括机械手和上述方案中任一项所述的真空吸附机构,所述机械手的活动端与所述真空吸附机构连接。
14、本实用新型的有益效果在于:在支架上增设滑动组件,并让吸盘组件设置在滑动组件的滑块上,使得吸盘组件能够根据玻璃的尺寸大小在支架上调节位置,以适应待抓取的玻璃尺寸。
技术特征:
1.一种真空吸附机构,其特征在于:包括支架、滑动组件和吸盘组件;
2.根据权利要求1所述真空吸附机构,其特征在于:所述滑动组件还包括驱动件,所述驱动件的活动端与滑块连接。
3.根据权利要求2所述真空吸附机构,其特征在于:所述滑动组件还包括滑杆,所述滑块滑动设置在滑杆上,所述驱动件的活动端的活动方向与滑杆的长度方向平行。
4.根据权利要求1所述真空吸附机构,其特征在于:所述支架包括纵梁和至少两个设置在纵梁上的横梁;所述滑动组件设置在横梁上。
5.根据权利要求4所述真空吸附机构,其特征在于:所述横梁上有至少两个相对设置或者相背设置的滑动组件。
6.根据权利要求1所述真空吸附机构,其特征在于:所述支架还包括副梁,所述吸盘组件设置在副梁上,且所述副梁上的吸盘组件的吸附端设置在所述吸附面上。
7.根据权利要求1所述真空吸附机构,其特征在于:所述支架上设置有安装座。
8.根据权利要求1或6所述真空吸附机构,其特征在于:还包括设置在支架上的真空发生器,所述真空发生器与吸盘组件的吸附端之间由软管连通。
9.根据权利要求1所述真空吸附机构,其特征在于:所述吸盘组件包括固定座和设置在固定座上的吸盘。
10.一种下料机器人,其特征在于:所述下料机器人包括机械手和权利要求1-9中任一项所述的真空吸附机构,所述机械手的活动端与所述真空吸附机构连接。
技术总结
本技术涉及玻璃抓取技术领域,具体涉及一种真空吸附机构及下料机器人,包括机械手和真空吸附机构,真空吸附机构包括支架、滑动组件和吸盘组件;所述支架的一侧具有吸附面;所述滑动组件包括滑动设置在所述支架上的滑块,所述吸盘组件设置在滑块上,且所述滑块上的吸盘组件的吸附端设置在所述吸附面上。本技术能够实现多种尺寸玻璃的抓取。
技术研发人员:杨宇,宋大民,陈锐,张溪
受保护的技术使用者:本溪福耀浮法玻璃有限公司
技术研发日:20230707
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!