一种机器人行走地轨
本技术涉及行走地轨,具体为一种机器人行走地轨。
背景技术:
1、工业自动化中,工业机器人逐渐被应用于生产的各个环节,替代人工作业,促进了自动化生产的进程。而机器人地轨作为机器人的一个行走辅助机构,也快速发展起来,在一些空间复杂、工件大的场合应用广泛。机器人地轨主要是带动工业机器人按指定路线进行移动,扩大机器人作业半径,扩展机器人使用范围功能,进一步提高机器人使用效率,降低机器人使用成本,实现全面自动化生产。
2、经检测,在现有技术中,中国专利号为:cn202120926036.8,公开日期为:2021-11-23,公开了一种无尘车间机器人行走地轨,包括横梁、固定板、导轨机构、导向机构和限位机构;所述导轨机构包括导轨梁、减震垫块和轨道,所述导轨梁底部两侧均固接加固板,所述加固板底部固接在减震垫块顶部,所述减震垫块底部连接横梁,所述导轨梁底部连接横梁,所述导轨梁顶部固接轨道,所述轨道表面安装滑块,所述滑块顶部固接固定板,所述固定板顶部连接移动板。可以通过移动架、滑块、轨道、移动槽和移动轮保证移动板在移动时稳定性,然后通过滑槽、第一滑块和侧板可以防止机器人在移动时出现强烈的晃动,而且加固板和减震垫块还可以起到一定的减震作用。
3、上述结构还存在以下缺陷:
4、待需要将地轨移位时,由于地轨较大且不易移动,需要将地轨拆卸后把地轨移动到合适的地位之后再进行组装。
技术实现思路
1、本实用新型的目的在于提供一种机器人行走地轨,以解决上述背景技术中提出的机器人行走地轨,由于地轨较大且不易移动,需要将地轨拆卸后把地轨移动到合适的地位之后再进行组装的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种机器人行走地轨,包括底座,所述底座的底部开设有凹槽,所述凹槽内设置有隐藏组件,所述隐藏组件包括两个升降组件、底板和四个万向轮,所述升降组件包括双向螺杆、两个滑块、连接杆和两个连接块,所述双向螺杆转动安装在凹槽内,两个所述滑块均螺纹安装在双向螺杆上,两个所述连接杆分别交接安装在对应的滑块上,两个所述连接块分别交接安装在对应的连接杆的底端,所述底板固定安装在两个连接块的底部,四个所述万向轮均固定安装在底板的底部,所述底座上设置有地轨组件。
3、优选的,所述隐藏组件还包括两个滑轮、皮带和电机,两个所述滑轮分别固定安装在对应的双向螺杆上,所述皮带套设在两个滑轮上,所述电机固定安装在底座的一侧外壁上,所述电机的输出轴于固定安装在对应的双向螺杆的一端,所述底座上设置有地轨组件。
4、优选的,所述升降组件还包括两个限位槽,两个所述限位槽均开设在凹槽的顶部内壁上,两个所述限位槽分别与对应的滑块滑动连接。
5、优选的,所述底座的底部固定安装有稳定圈,所述稳定圈呈回形设置。
6、优选的,所述地轨组件包括两个侧板、两个滑轨、两个移动块和移动板,两个所述侧板均固定安装在底座的顶部,两个所述滑轨分别开设在对应的侧板的一侧外壁上,两个所述移动块分别滑动安装在对应的滑轨内,所述移动板固定安装在两个移动块相互靠近的一侧外壁上。
7、优选的,所述地轨组件还包括两个导轨梁、两个轨道、两个移动槽和多个卡槽,两个所述导轨梁均固定安装在底座的顶部,两个所述轨道分别固定安装在对应导轨梁的顶部,两个所述移动槽分别开设在对应的导轨梁的顶部,多个所述卡槽分别开设在对应的导轨梁的顶部。
8、本实用新型的机器人行走地轨,具有如下有益效果:
9、通过启动电机带动对应的双向螺杆和滑轮转动,使得皮带能够让两个双向螺杆同步转动,让滑块相互靠近带动连接杆推动底板向下移动,通过万向轮底座顶起,从而便于移动整个地轨,将地轨移动到合适的位置之后,将万向轮收进凹槽内,通过稳定圈避免底座与地板碰撞,对双方进行保护,具有便于移动机器人行走地轨的优点。
技术特征:
1.一种机器人行走地轨,其特征在于:包括底座(1),所述底座(1)的底部开设有凹槽(2),所述凹槽(2)内设置有隐藏组件,所述隐藏组件包括两个升降组件、底板(7)和四个万向轮(8),所述升降组件包括双向螺杆(3)、两个滑块(4)、连接杆(5)和两个连接块(6),所述双向螺杆(3)转动安装在凹槽(2)内,两个所述滑块(4)均螺纹安装在双向螺杆(3)上,两个所述连接杆(5)分别交接安装在对应的滑块(4)上,两个所述连接块(6)分别交接安装在对应的连接杆(5)的底端,所述底板(7)固定安装在两个连接块(6)的底部,四个所述万向轮(8)均固定安装在底板(7)的底部,所述底座(1)上设置有地轨组件(14)。
2.根据权利要求1所述的一种机器人行走地轨,其特征在于:所述隐藏组件还包括两个滑轮(9)、皮带(10)和电机(11),两个所述滑轮(9)分别固定安装在对应的双向螺杆(3)上,所述皮带(10)套设在两个滑轮(9)上,所述电机(11)固定安装在底座(1)的一侧外壁上,所述电机(11)的输出轴于固定安装在对应的双向螺杆(3)的一端。
3.根据权利要求1所述的一种机器人行走地轨,其特征在于:所述升降组件还包括两个限位槽(12),两个所述限位槽(12)均开设在凹槽(2)的顶部内壁上,两个所述限位槽(12)分别与对应的滑块(4)滑动连接。
4.根据权利要求1所述的一种机器人行走地轨,其特征在于:所述底座(1)的底部固定安装有稳定圈(13),所述稳定圈(13)呈回形设置。
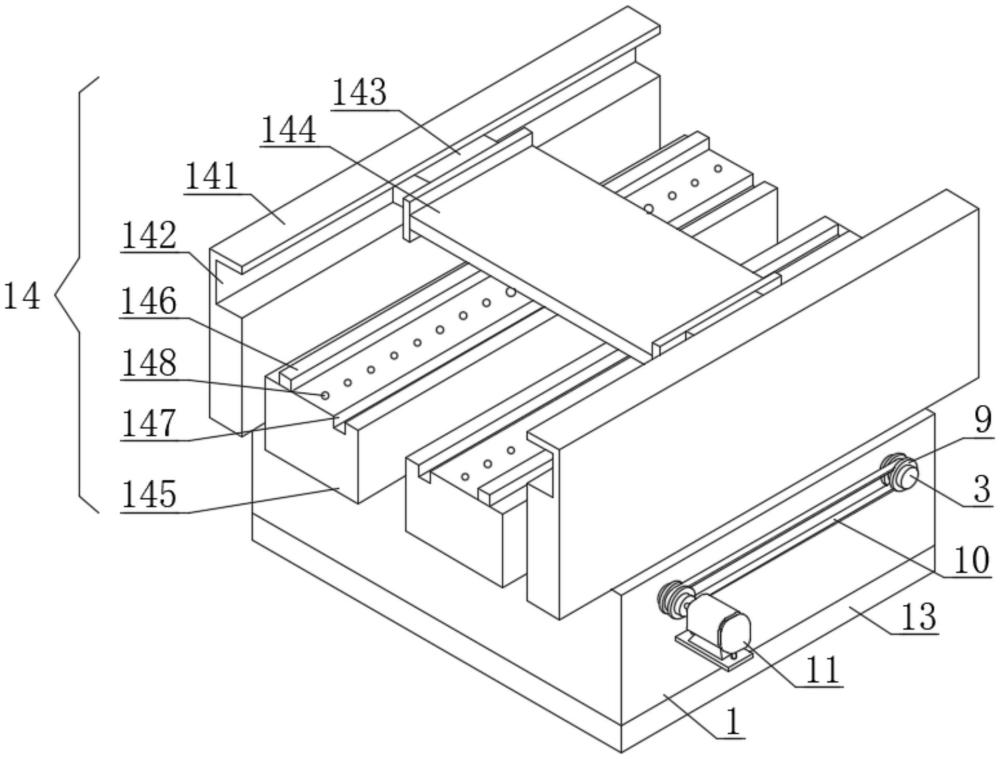
5.根据权利要求1所述的一种机器人行走地轨,其特征在于:所述地轨组件(14)包括两个侧板(141)、两个滑轨(142)、两个移动块(143)和移动板(144),两个所述侧板(141)均固定安装在底座(1)的顶部,两个所述滑轨(142)分别开设在对应的侧板(141)的一侧外壁上,两个所述移动块(143)分别滑动安装在对应的滑轨(142)内,所述移动板(144)固定安装在两个移动块(143)相互靠近的一侧外壁上。
6.根据权利要求5所述的一种机器人行走地轨,其特征在于:所述地轨组件(14)还包括两个导轨梁(145)、两个轨道(146)、两个移动槽(147)和多个卡槽(148),两个所述导轨梁(145)均固定安装在底座(1)的顶部,两个所述轨道(146)分别固定安装在对应导轨梁(145)的顶部,两个所述移动槽(147)分别开设在对应的导轨梁(145)的顶部,多个所述卡槽(148)分别开设在对应的导轨梁(145)的顶部。
技术总结
本技术公开了一种机器人行走地轨,包括底座,所述底座的底部开设有凹槽,所述凹槽内设置有隐藏组件,所述隐藏组件包括两个升降组件、底板和四个万向轮,所述升降组件包括双向螺杆、两个滑块、连接杆和两个连接块,所述双向螺杆转动安装在凹槽内,两个所述滑块均螺纹安装在双向螺杆上,两个所述连接杆分别交接安装在对应的滑块上,两个所述连接块分别交接安装在对应的连接杆的底端,所述底板固定安装在两个连接块的底部。该机器人行走地轨,通过启动电机带动对应的双向螺杆,滑块相互靠近带动连接杆推动底板向下移动,通过万向轮底座顶起,从而便于移动整个地轨,具有便于移动机器人行走地轨的优点。
技术研发人员:雷虎,任佳
受保护的技术使用者:西安翻译学院
技术研发日:20230710
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!