一种核工业用电随动主从臂电控装置的制作方法
本技术涉及机电工程,具体而言,涉及一种核工业用电随动主从臂电控装置。
背景技术:
1、现在,核能作为一种新兴能源,越来越受到各个国家的重视,核工业由于核辐射的影响,一般情况下,装置都处于密闭的环境内,对粉尘、温度、湿度和压力的要求较高,由此出现了核工业电随动主从机械手,传统的电随动主从机械手以运动控制器作为主控制器,主臂和从臂组成和构造相同,均包含伺服驱动器、伺服电机、减速机、传动机构和各关节。人工操作主臂运动时,带动各关节伺服电机转动。运动控制器根据主臂各关节伺服电机和驱动器的速度、位置反馈信号控制从臂各关节伺服驱动器驱动对应伺服电机,使其与主臂各关节伺服电机做同步运动,从而实现从臂与主臂的跟随运动。运动控制器根据从臂各关节伺服电机和驱动器反馈的力矩信号控制主臂各关节伺服驱动器以力矩控制模式驱动对应伺服电机输出相应的力矩,提供一定的阻力,从而实现主臂的力反馈。但是主臂带有减速机,操作阻力大、灵活性差。为此,希望主臂各关节伺服电机能起助力作用,即电控系统需要能预判人工操作的方向和速度,以便控制主臂伺服驱动器驱动对应伺服电机跟随人工操作动作。主臂伺服电机既要提供力反馈的阻力,又要起到操作助力作用,两者是相互矛盾的,而且控制系统是正反馈过程,控制算法复杂,开发难度很大。
2、在2017年5月17日公开的,公开号为cn206170056u的中国发明专利公开了一种核工业用电随动主从臂电控装置,主臂包括:抱闸、磁滞制动器、绝对编码器、传动机构和关节,所述传动机构、绝对编码器和制动器均固定连接传动轴,传动轴依次穿过传动机构、绝对编码器和制动器,力矩控制器两端分别连接制动器和运动控制器,传动机构和关节连接,本实用新型主臂去除减速机,通过制动力作为反馈力,操作阻力小,灵活性好,同时可实现一比一的力反馈;
3、该方案记载的技术方案通过制动力作为反馈力,操作阻力小,灵活性好,同时可实现一比一的力反馈;但是,该专利技术是通过丝杠旋转来调节制动片和制动盘之间的摩擦力,从而改变制动阻力作为力反馈,而制动片的移动并未依靠限位机构来进行限位,同时为了达到目的,制动片必然不能随丝杠一同旋转,由此可知,该处的丝杠为滚珠丝杠运动副,而滚珠丝杠运动副不具备自锁的能力,所以该处的自锁是依靠伺服电机的自锁能力,而在系统失电后,伺服电机因失去电能而停止工作,但内部的制动器会因停电而抱闸,导致停机的伺服电机仍然处于自锁中,从而使制动片无法在阻尼弹簧或磁力的作用下与制动盘压死。
技术实现思路
1、为了弥补以上不足,本实用新型提供了一种核工业用电随动主从臂电控装置。
2、本实用新型是这样实现的:
3、一种核工业用电随动主从臂电控装置,包括固定机构、主臂和从臂,所述固定机构包括固定底板,所述固定底板的一侧安装有三组第一固定架,所述主臂包括传动轴,所述传动轴通过轴承与底部的第一固定架相连接,所述传动轴的顶端传动连接有卡盘,所述卡盘的外侧设有连接罩,且所述连接罩安装在中间的第一固定架的顶部,所述连接罩的内壁安装有电磁铁,所述连接罩的内壁通过阻尼弹簧连接有若干卡块,且所述卡块和卡盘可互相卡合。
4、采用上述进一步方案的有益效果是,在通电状态下,电磁铁会吸住卡块,使得卡块远离卡盘,并挤压阻尼弹簧,使其压缩,当设备断电时,电磁铁因停电而失去磁力,此时,阻尼弹簧复位,从而使卡块与卡盘相卡合,使得传动轴无法旋转,以保证在断电后,传动轴能够被锁定,从而使主臂无法被使用。
5、进一步的,所述第一固定架之间设有螺纹杆,所述螺纹杆的顶端传动连接有第一伺服电机,且所述第一伺服电机安装在顶部的第一固定架的顶部,所述螺纹杆的外侧咬合连接有调节套,所述调节套的底端安装有制动片,所述传动轴的顶端安装有制动盘。
6、进一步的,所述螺纹杆的外侧套装有限位套,且所述限位套安装在顶部的第一固定架的底部,所述限位套的底部开设有限位槽,所述调节套的外侧安装有限位块,且所述限位块可在限位槽内滑动。
7、采用上述进一步方案的有益效果是,第一伺服电机带动着螺纹杆旋转,因外侧的调节套被限位块和限位槽限位,所以调节套会因螺纹杆的旋转而做直线运动,以调节制动片和制动盘之间的压力,从而达到调节它们之间摩擦力的目的,通过制动力作为反馈力,操作阻力小,灵活性好,同时可实现一比一的力反馈。
8、进一步的,所述传动轴的外侧安装有绝对编码器,所述绝对编码器安装在底部的第一固定架的顶部,所述传动轴的底端通过锥齿轮连接有第一关节。
9、进一步的,所述从臂包括第二伺服电机,所述固定底板的一侧安装有第二固定架,所述第二伺服电机安装在第二固定架的顶部,所述第二伺服电机的输出端传动连接有连接轴,连接轴的底部通过锥齿轮连接有第二关节。
10、进一步的,所述固定底板的一侧安装有力矩控制器和运动控制器。
11、进一步的,所述力矩控制器和运动控制器为同一轴线排布,所述力矩控制器和运动控制器均与第一伺服电机、第二伺服电机、绝对编码器电性连接。
12、采用上述进一步方案的有益效果是,从臂位于密闭环境内,主臂位于外部,人工操作主臂运动时,带动第一关节和绝对编码器转动,运动控制器根据第一关节的绝对编码器的速度、位置反馈信号控制第二关节对应的第二伺服电机与第一关节做同步运动,从而实现从臂与主臂跟随运动,从臂跟随运动过程中,运动控制器根据第二伺服电机和驱动器反馈的力矩信号控制力矩控制器,成比例的输出相应的电流,控制对应的第一伺服电机输出相应的力矩作为力反馈。
13、本实用新型的有益效果是:本实用新型通过上述设计得到的一种核工业用电随动主从臂电控装置,在通电状态下,电磁铁会吸住卡块,使得卡块远离卡盘,并挤压阻尼弹簧,使其压缩,当设备断电时,电磁铁因停电而失去磁力,此时,阻尼弹簧复位,从而使卡块与卡盘相卡合,使得传动轴无法旋转,以保证在断电后,传动轴能够被锁定,从而使主臂无法被使用,第一伺服电机带动着螺纹杆旋转,因外侧的调节套被限位块和限位槽限位,所以调节套会因螺纹杆的旋转而做直线运动,以调节制动片和制动盘之间的压力,从而达到调节它们之间摩擦力的目的,通过制动力作为反馈力,操作阻力小,灵活性好,同时可实现一比一的力反馈。
技术特征:
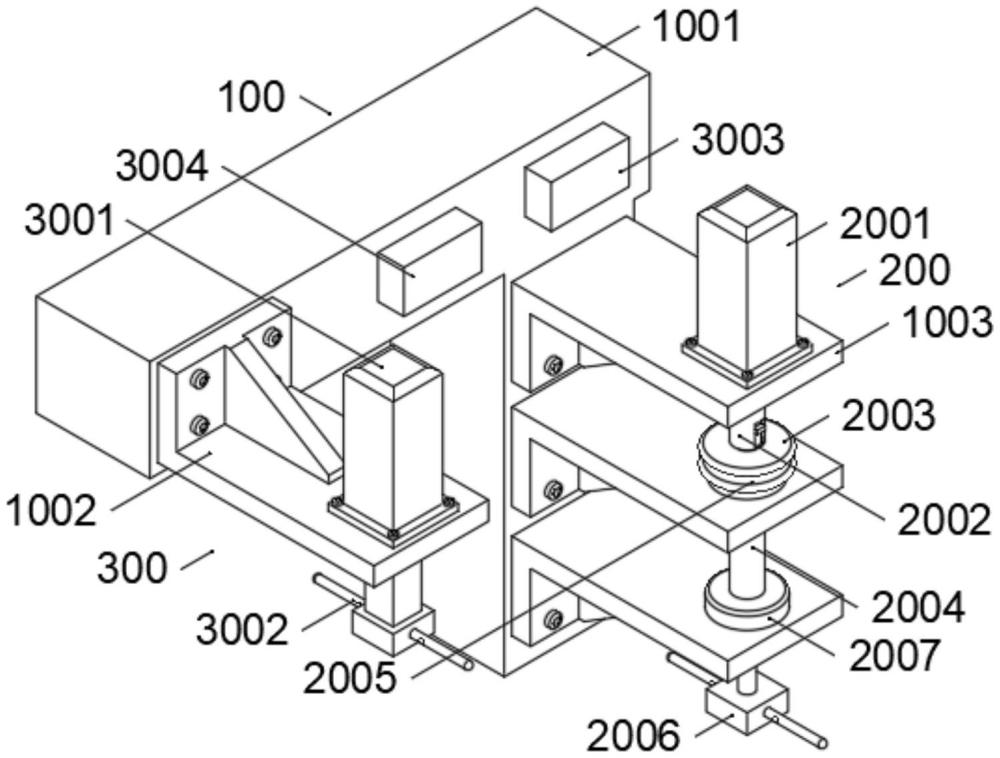
1.一种核工业用电随动主从臂电控装置,其特征在于,包括固定机构(100)、主臂(200)和从臂(300),
2.根据权利要求1所述的一种核工业用电随动主从臂电控装置,其特征在于,所述第一固定架(1003)之间设有螺纹杆(2011),所述螺纹杆(2011)的顶端传动连接有第一伺服电机(2001),且所述第一伺服电机(2001)安装在顶部的第一固定架(1003)的顶部,所述螺纹杆(2011)的外侧咬合连接有调节套(2013),所述调节套(2013)的底端安装有制动片(2003),所述传动轴(2004)的顶端安装有制动盘(2005)。
3.根据权利要求2所述的一种核工业用电随动主从臂电控装置,其特征在于,所述螺纹杆(2011)的外侧套装有限位套(2002),且所述限位套(2002)安装在顶部的第一固定架(1003)的底部,所述限位套(2002)的底部开设有限位槽(2012),所述调节套(2013)的外侧安装有限位块(2014),且所述限位块(2014)可在限位槽(2012)内滑动。
4.根据权利要求3所述的一种核工业用电随动主从臂电控装置,其特征在于,所述传动轴(2004)的外侧安装有绝对编码器(2007),所述绝对编码器(2007)安装在底部的第一固定架(1003)的顶部,所述传动轴(2004)的底端通过锥齿轮连接有第一关节(2006)。
5.根据权利要求4所述的一种核工业用电随动主从臂电控装置,其特征在于,所述从臂(300)包括第二伺服电机(3001),所述固定底板(1001)的一侧安装有第二固定架(1002),所述第二伺服电机(3001)安装在第二固定架(1002)的顶部,所述第二伺服电机(3001)的输出端传动连接有连接轴,连接轴的底部通过锥齿轮连接有第二关节(3002)。
6.根据权利要求5所述的一种核工业用电随动主从臂电控装置,其特征在于,所述固定底板(1001)的一侧安装有力矩控制器(3003)和运动控制器(3004)。
7.根据权利要求6所述的一种核工业用电随动主从臂电控装置,其特征在于,所述力矩控制器(3003)和运动控制器(3004)为同一轴线排布,所述力矩控制器(3003)和运动控制器(3004)均与第一伺服电机(2001)、第二伺服电机(3001)、绝对编码器(2007)电性连接。
技术总结
本技术提供了一种核工业用电随动主从臂电控装置,属于机电工程技术领域。该便核工业用电随动主从臂电控装置,包括固定机构、主臂和从臂,固定机构包括固定底板,固定底板的一侧安装有三组第一固定架,主臂包括传动轴,传动轴通过轴承与底部的第一固定架相连接,传动轴的顶端传动连接有卡盘,卡盘的外侧设有连接罩,且连接罩安装在中间的第一固定架的顶部,连接罩的内壁安装有电磁铁,连接罩的内壁通过阻尼弹簧连接有若干卡块,且卡块和卡盘可互相卡合,通过阻尼弹簧复位来使卡块和卡盘互相卡合,以保证在断电后,传动轴能够被锁定,从而使主臂无法被使用。
技术研发人员:彭畅,张浩野
受保护的技术使用者:航核研创智能设备科技(无锡)有限公司
技术研发日:20230710
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!