一种可调角度的机器人关节连接结构的制作方法
本技术涉及机器人关节,尤其涉及一种可调角度的机器人关节连接结构。
背景技术:
1、机器人是一种能够半自主或全自主工作的智能机器,机器人能够通过编程和自动控制来执行诸如作业或移动等任务,机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
2、骨与骨之间的连接称骨连接。骨连接又分为直接连接和间接连接,关节是间接连接的一种形式,机器人骨骼之间的连接也被叫关节。
3、目前机器人关节的连接结构复杂,不方便机器人关节处与腿部骨骼进行连接,同时机器人关节连接处较为复杂,使机器人关节零部件损坏时维修不方便。
4、因此本实用新型提出一种可调角度的机器人关节连接结构以解决现有技术中存在的问题。
技术实现思路
1、本实用新型提供一种可调角度的机器人关节连接结构,解决了目前机器人关节的连接结构复杂,不方便机器人关节处与腿部骨骼进行连接,同时机器人关节连接处较为复杂,使机器人关节零部件损坏时维修不方便的问题。
2、为了解决上述的问题,本实用新型提出一种可调角度的机器人关节连接结构,包括第一关节板,所述第一关节板的下方设有第二关节板,所述第一关节板与第二关节板相互靠近的面一端均固定连接有筒体,所述筒体的内部贯穿有工作螺杆,所述工作螺杆的一端螺纹连接有丝帽,所述第一关节板的内部转动连接有第一辅助杆,所述第一辅助杆的底部固定连接有第一安装座,所述第一安装座的内部安装有电缸,所述第一安装座的一侧螺纹连接有与电缸相接触的第一螺栓。
3、优选的,所述第二关节板的内部转动连接有第二辅助杆,所述第二辅助杆的顶部固定连接有第二安装座。
4、优选的,所述第二安装座与电缸的输出端相适配,所述第二安装座的一侧螺纹连接有与电缸输出端相接触的第二螺栓。
5、优选的,所述第一关节板的顶部对称开设有导向槽,所述第一关节板的外壁两侧均开设有限位槽,所述限位槽的内壁开设有与导向槽相连通的螺纹孔。
6、优选的,所述第一关节板的顶部对称连接有支撑板,所述支撑板的顶部开设有卡槽,所述卡槽的内部安装有橡胶板。
7、优选的,所述第一关节板的上方固定连接有连接板,所述连接板的底部对称连接有与导向槽相适配的插板,所述螺纹孔的内部螺纹连接有与插板相接触的定位螺栓。
8、本实用新型的有益效果为:通过第一关节板与第二关节板带动筒体,并使工作螺杆贯穿筒体,工作螺杆与丝帽配合,方便对第一关节板与第二关节板进行拆装,通过第二辅助杆带动第二安装座工作,并将电缸输出端安装在第二安装座的内部,同时在第二螺栓的作用下定位,当电缸工作时便于对第二关节板的旋转角度进行调节,通过连接板带动插板,插板安装在导向槽的内部,并通过支撑板顶部的卡槽安装橡胶板,可以对连接板的连接处进行保护,接着在螺纹孔的作用下转动定位螺栓,使定位螺栓与插板接触,方便用户对连接板进行拆装,提高了产品的实用性。
技术特征:
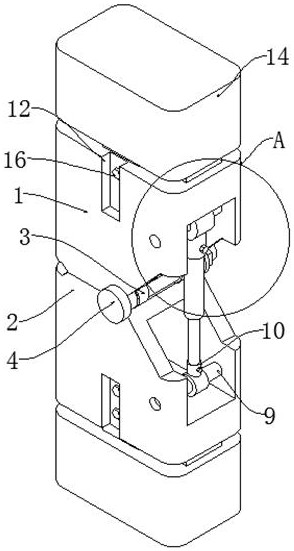
1.一种可调角度的机器人关节连接结构,包括第一关节板(1),其特征在于:所述第一关节板(1)的下方设有第二关节板(2),所述第一关节板(1)与第二关节板(2)相互靠近的面一端均固定连接有筒体(3),所述筒体(3)的内部贯穿有工作螺杆(4),所述工作螺杆(4)的一端螺纹连接有丝帽(5),所述第一关节板(1)的内部转动连接有第一辅助杆(6),所述第一辅助杆(6)的底部固定连接有第一安装座(7),所述第一安装座(7)的内部安装有电缸(8),所述第一安装座(7)的一侧螺纹连接有与电缸(8)相接触的第一螺栓。
2.根据权利要求1所述的一种可调角度的机器人关节连接结构,其特征在于:所述第二关节板(2)的内部转动连接有第二辅助杆(9),所述第二辅助杆(9)的顶部固定连接有第二安装座(10)。
3.根据权利要求2所述的一种可调角度的机器人关节连接结构,其特征在于:所述第二安装座(10)与电缸(8)的输出端相适配,所述第二安装座(10)的一侧螺纹连接有与电缸(8)输出端相接触的第二螺栓。
4.根据权利要求3所述的一种可调角度的机器人关节连接结构,其特征在于:所述第一关节板(1)的顶部对称开设有导向槽(11),所述第一关节板(1)的外壁两侧均开设有限位槽(12),所述限位槽(12)的内壁开设有与导向槽(11)相连通的螺纹孔。
5.根据权利要求4所述的一种可调角度的机器人关节连接结构,其特征在于:所述第一关节板(1)的顶部对称连接有支撑板(13),所述支撑板(13)的顶部开设有卡槽,所述卡槽的内部安装有橡胶板。
6.根据权利要求5所述的一种可调角度的机器人关节连接结构,其特征在于:所述第一关节板(1)的上方固定连接有连接板(14),所述连接板(14)的底部对称连接有与导向槽(11)相适配的插板(15),所述螺纹孔的内部螺纹连接有与插板(15)相接触的定位螺栓(16)。
技术总结
本技术公开了一种可调角度的机器人关节连接结构,包括第一关节板,所述第一关节板的下方设有第二关节板,所述第一关节板与第二关节板相互靠近的面一端均固定连接有筒体,所述筒体的内部贯穿有工作螺杆,所述工作螺杆的一端螺纹连接有丝帽,所述第一关节板的内部转动连接有第一辅助杆;本产品通过第一关节板与第二关节板带动筒体,并使工作螺杆贯穿筒体,工作螺杆与丝帽配合,方便对第一关节板与第二关节板进行拆装,通过连接板带动插板,插板安装在导向槽的内部,并通过支撑板顶部的卡槽安装橡胶板,可以对连接板的连接处进行保护,接着在螺纹孔的作用下转动定位螺栓,使定位螺栓与插板接触,方便用户对连接板进行拆装,实用性较高。
技术研发人员:王勇,戴茜婧,王卓然
受保护的技术使用者:阿凡达(湖南)科技有限公司
技术研发日:20230717
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!