一种智能警务机器人的制作方法
本技术涉及机器人,具体而言,涉及一种智能警务机器人。
背景技术:
1、在智能巡逻机器人实际使用过程中,由于路面会存在台阶、路坎等障碍物,在智能巡逻机器人因障碍物摔倒后,现有智能巡逻机器人无法自行爬起,给使用过程带来不便。
技术实现思路
1、为了弥补以上不足,本实用新型提供了一种智能警务机器人,用于解决上述问题。
2、本实用新型是这样实现的:
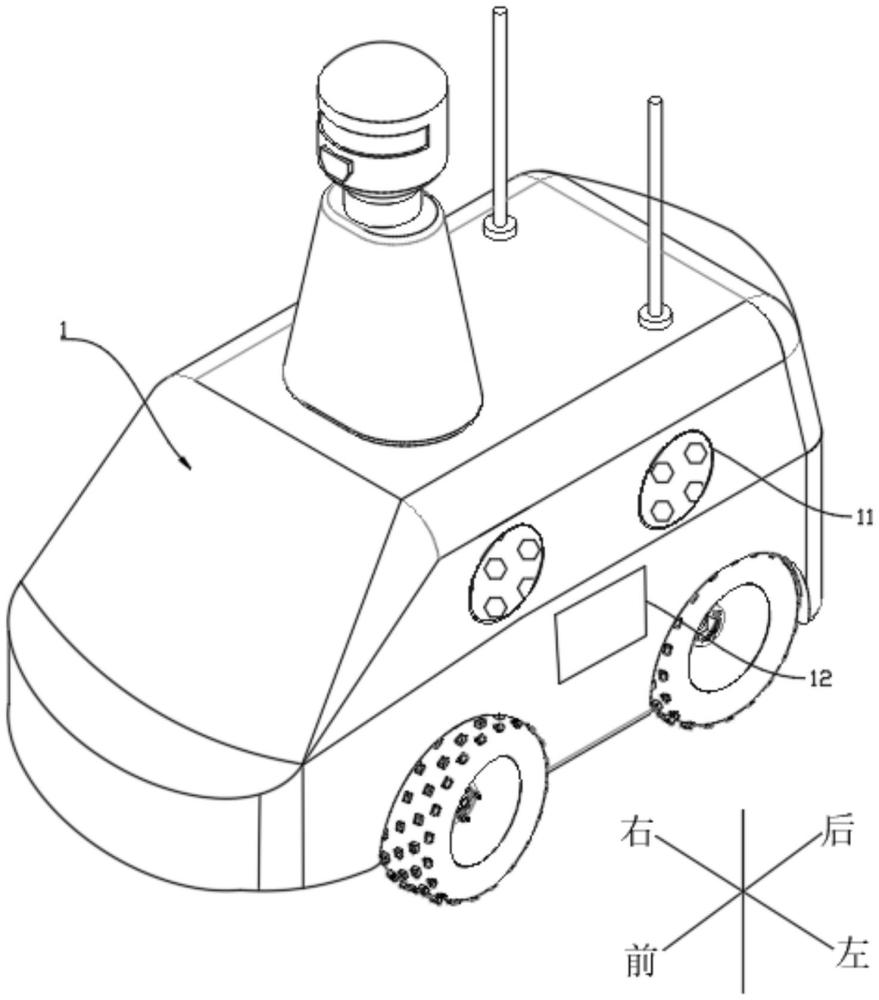
3、一种智能警务机器人,包括机器人本体,所述机器人本体上置有底盘;
4、所述机器人本体的外壳的左右两侧对称开设有两个第一活动孔和一个第二活动孔,所述第二活动孔位于所述第一活动孔的下方;
5、伸缩重力锤组件,包括固定盘、夹具、电推杆a、配重块、电机和加速度计,所述固定盘设置在所述底盘的顶部,所述固定盘轴心处开设有通孔,所述电机设置在所述固定盘的底部,所述电机的输出轴贯穿所述通孔与所述夹具连接,所述电推杆a设置在所述固定盘的顶部,所述电推杆a与所述夹具固定连接,所述电推杆a的输出轴连接有配重块,所述固定盘的底部前侧设置有加速度计,所述底盘的顶部设置有控制器,所述加速度计与所述控制器电连接;
6、所述电推杆a伸长后,所述配重块刚好穿过所述第二活动孔;
7、伸缩支撑组件,包括壳体、电推杆b和脚架,所述壳体固定设置在所述外壳的内部,所述电推杆b固定设置在所述壳体的内部,所述电推杆b的输出轴端部设置有脚架,所述脚架插接在所述第一活动孔的内部。
8、在本实用新型的一种实施例中,所述固定盘由圆盘和外滑道组成,所述外滑道设置在所述圆盘的边缘处且与所述底盘固定连接,所述电推杆a完全收缩时,所述配重块位于所述外滑道的顶部。
9、在本实用新型的一种实施例中,所述电推杆a靠近输出轴的一端的底部设置有滚轮,所述圆盘的顶部开设有内导轨,所述滚轮与所述内导轨滚动连接。
10、在本实用新型的一种实施例中,所述外滑道的顶部左右两侧对称设置有两根限位柱。
11、在本实用新型的一种实施例中,所述限位柱上设置有防撞棉。
12、在本实用新型的一种实施例中,所述脚架的底部设置有防滑垫。
13、在本实用新型的一种实施例中,所述机器人本体的前侧和后侧为弧形结构。
14、本实用新型的有益效果是:本智能警务机器人与现有技术相比加装了伸缩支撑组件和伸缩重力锤组件,智能警务机器人摔倒后,加速度计判断该机器人摔倒方向,通过控制器控制伸缩支撑组件与伸缩重力锤组件配合实现机器人自行起来的功能,解决了现有智能巡逻机器人在因碰到障碍物摔倒后,无法自行爬起的问题。
技术特征:
1.一种智能警务机器人,包括机器人本体(1),所述机器人本体(1)上置有底盘,其特征在于,
2.根据权利要求1所述的智能警务机器人,其特征在于,所述固定盘(21)由圆盘(211)和外滑道(212)组成,所述外滑道(212)设置在所述圆盘(211)的边缘处且与所述底盘固定连接,所述电推杆a(22)完全收缩时,所述配重块(23)位于所述外滑道(212)的顶部。
3.根据权利要求2所述的智能警务机器人,其特征在于,所述电推杆a(22)靠近输出轴的一端的底部设置有滚轮(221),所述圆盘(211)的顶部开设有内导轨(213),所述滚轮(221)与所述内导轨(213)滚动连接。
4.根据权利要求2所述的智能警务机器人,其特征在于,所述外滑道(212)的顶部左右两侧对称设置有两根限位柱(27)。
5.根据权利要求4所述的智能警务机器人,其特征在于,所述限位柱(27)上设置有防撞棉(271)。
6.根据权利要求1所述的智能警务机器人,其特征在于,所述脚架(33)的底部设置有防滑垫(34)。
7.根据权利要求1所述的智能警务机器人,其特征在于,所述机器人本体(1)的前侧和后侧为弧形结构。
技术总结
本技术提供了一种智能警务机器人,属于机器人技术领域,包括机器人本体,机器人本体的外壳的左右两侧对称开设有两个第一活动孔和一个第二活动孔,在机器人本体的底盘上设置有伸缩重力锤组件,包括固定盘、夹具、电推杆A、配重块、电机和加速度计,第一活动孔还设置有伸缩支撑组件,包括壳体、电推杆B和脚架,壳体固定设置在外壳的内部,通过加速度计可以判断该机器人是否摔倒,以及摔倒方向,如若摔倒,通过控制器控制伸缩支撑组件与伸缩重力锤组件配合实现机器人自行起来的功能,解决了现有智能巡逻机器人在因碰到障碍物摔倒后,无法自行爬起的问题。
技术研发人员:唐传敏,秦海龙,马克,赵庆
受保护的技术使用者:唐传敏
技术研发日:20230718
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!