一种机械臂伸缩结构的制作方法
本申请属于机械臂领域,具体为一种机械臂伸缩结构。
背景技术:
1、机械臂伸缩结构是一种具有多种优点的工程设计,机械臂伸缩结构可以根据特定任务的需求调整其长度和工作范围。这种灵活性使得机械臂能够适应不同大小和高度的目标物体,提供更广泛的操作能力。无论是需要延伸到较远距离的作业还是在狭小空间内执行精确动作,机械臂都能通过伸缩结构来达到最佳效果。机械臂伸缩结构的收缩特性使其在不使用时能够减小尺寸,从而节省空间并方便存储和运输。这对于有限空间的工作环境或移动式的应用场景尤为重要。机械臂伸缩结构采用套接或锁定机制,确保在伸展过程中的强度和稳定性。这样可以保证在任何伸缩位置下都能够承受工作负载并提供可靠的性能。无论是抓取重物、进行高精度的组装任务还是执行振动或冲击性工作,机械臂伸缩结构都能够提供坚固可靠的支持。机械臂伸缩结构可以与自动化系统集成,通过编程来实现精确的伸缩控制。这样的设计使得机械臂能够根据预定的路径和动作序列进行自主操作,从而提高生产效率和工作精度。同时,伸缩结构的位置和运动可以通过传感器和反馈机制进行实时监测和调整,以适应不同的工作情况,机械臂伸缩结构在工业自动化、建筑施工、救援任务等诸多领域具有广泛的应用。无论是装配线上的零件抓取、高处或危险环境下的作业、地震救援中的搜救任务,还是航空航天领域中的维修和检查作业,机械臂伸缩结构可为这些应用提供灵活、高效且安全可靠的解决方案。总的来说,机械臂伸缩结构的优点包括调节性、多功能性、空间利用率高、强度和稳定性、可编程和自动化控制,以及适用范围广泛。这种设计使得机械臂能够在各种工作场景下进行灵活、精确和高效的操作,提升生产效率并降低人力成本。
2、如公开号:cn108393924b公布了一种线驱动可伸缩弯曲全柔性机械臂结构,该结构由弹簧线绳控制姿态,利用弹簧的自身可伸缩特性,用绕线的方式控制弹簧的伸长,线绳从节片边缘的小孔穿出,每一组线绳分别控制一个节片,这种结构使柔性臂更加稳定;初始状态下,底部驱动的步进电机处于静止,全柔性机械臂长度最长;当需要全柔性机械臂的末端达到指定点或全柔性机械臂需要被压缩时,三台步进电机运动,带动绕线器转动,使线绳向下运动,全柔性机械臂的节片间距变小,弹簧压缩,使得整体结构压缩。操作空间能够达到更广阔的区域,并节省驱动部分占用空间。该结构稳定性可靠,功能完善,末端位置能够达到外包络面内的任意位置。
3、但是常见的该申请中对于机械臂的伸缩结构是固定的,无法做到当需要多角度作业时进行调节机械臂方向,不方便使用。
技术实现思路
1、本申请的目的在于:为了解决上述提出的多角度旋转问题,提供一种机械臂伸缩结构。
2、本申请采用的技术方案如下:一种机械臂伸缩结构,包括支撑底板,所述支撑底板的上端固定连接有圆形固定板,所述圆形固定板的上端设置有旋转圆板,所述旋转圆板的侧面固定连接有螺栓固定板,所述螺栓固定板的表面开设有螺纹孔,所述螺纹孔内插接着固定螺栓,所述圆形固定板的表面开设有多个孔洞,所述固定螺栓的底端插接在圆形固定板表面的孔洞内,所述孔洞的大小和固定螺栓的大小相适配,所述旋转圆板的表面固定连接有把手固定板,所述把手固定板的侧面固定连接有把手,所述把手的表面粘接有防滑垫。
3、通过采用上述技术方案,在使用机械臂伸缩结构时,可以通过把手固定板来带动旋转圆板转动,从而带动机械臂的转动,在需要转动机械臂时可以将固定螺栓从螺栓固定板中取出,然后工作人员手持电机固定板表面的防滑垫从而带动把手固定板的运动,当运动到指定位置后可以将固定螺栓在插接回螺栓固定板中,连接圆形固定板,固定住旋转圆板的位置,保证旋转圆板不会在使用时会移动,通过使用该装置时,可以将机械臂结构转到需要作业的位置,可以满足不同情况中的仪器作业,方便工作人员操作仪器进行作业,节省时间,提高工作效率。
4、在一优选的实施方式中,所述支撑底板的表面位于圆形固定板的相邻位置固定连接有电机固定板,所述电机固定板的上端设置有底板电机。
5、通过采用上述技术方案,所述电机固定板固定底板电机的位置,保证底板电机的稳定性,所述底板电机为仪器提供动力,方便使用。
6、在一优选的实施方式中,所述旋转圆板的表面位于把手固定板相邻的位置固定连接有连接柱,所述连接柱的上端固定连接有支撑板。
7、通过采用上述技术方案,所述连接柱固定支撑板的位置,方便旋转带动整个装置的转动,方便进行多角度调节,所述支撑板方便支撑固定块一的位置。
8、在一优选的实施方式中,所述支撑板的上端固定连接有固定块一,所述固定块一的侧面设置有转动电机一,所述固定块一的侧面位于转动电机一相反的一侧滑动连接有连接板一。
9、通过采用上述技术方案,所述固定块一固定转动电机一的位置,方便转动电机一带动连接板一进行转动,方便作业,所述连接板一连接固定块二,保证仪器的连贯性。
10、在一优选的实施方式中,所述连接板一的另一端侧面滑动连接有固定块二,所述固定块二的侧面设置有转动电机二。所述固定块二的侧面位于转动电机二相邻的一侧设置有连接板二。
11、通过采用上述技术方案,所述固定块二固定住转动电机二的位置,方便转动电机二带动连接板二进行转动,方便作业,所述固定块二连接连接板二,保证仪器的连贯性。
12、在一优选的实施方式中,所述连接板二的另一端固定连接有凹型板,所述凹型板内滑动连接有固定螺丝,所述固定螺丝固定连接有连接板三,所述连接板三的上端设置有操作电机。
13、通过采用上述技术方案,所述凹型板连接固定螺丝方便带动连接板三的转动,所述操作电机控制机械爪的运动,方便进行抓取作业,保证机器作业的高效。
14、在一优选的实施方式中,所述操作电机的远离操作电机的一端固定连接有延伸板,所述延伸板的下端设置有固定圆块,所述固定圆块的下端设置有机械爪,所述机械爪的下面固定连接有橡胶软垫。
15、通过采用上述技术方案,所述延伸板连接固定圆块的位置,方便固定,所述机械爪方便抓取需要作业的产品,方便作业,所述固定圆块控制机械爪位置,所述橡胶软垫方便对抓取的产品进行保护,防止损坏。
16、综上所述,由于采用了上述技术方案,本申请的有益效果是:
17、本申请中,在使用机械臂伸缩结构时,可以通过把手固定板来带动旋转圆板转动,从而带动机械臂的转动,在需要转动机械臂时可以将固定螺栓从螺栓固定板中取出,然后工作人员手持电机固定板表面的防滑垫从而带动把手固定板的运动,当运动到指定位置后可以将固定螺栓在插接回螺栓固定板中,连接圆形固定板,固定住旋转圆板的位置,保证旋转圆板不会在使用时会移动,通过使用该装置时,可以将机械臂结构转到需要作业的位置,可以满足不同情况中的仪器作业,方便工作人员操作仪器进行作业,节省时间,提高工作效率。
技术特征:
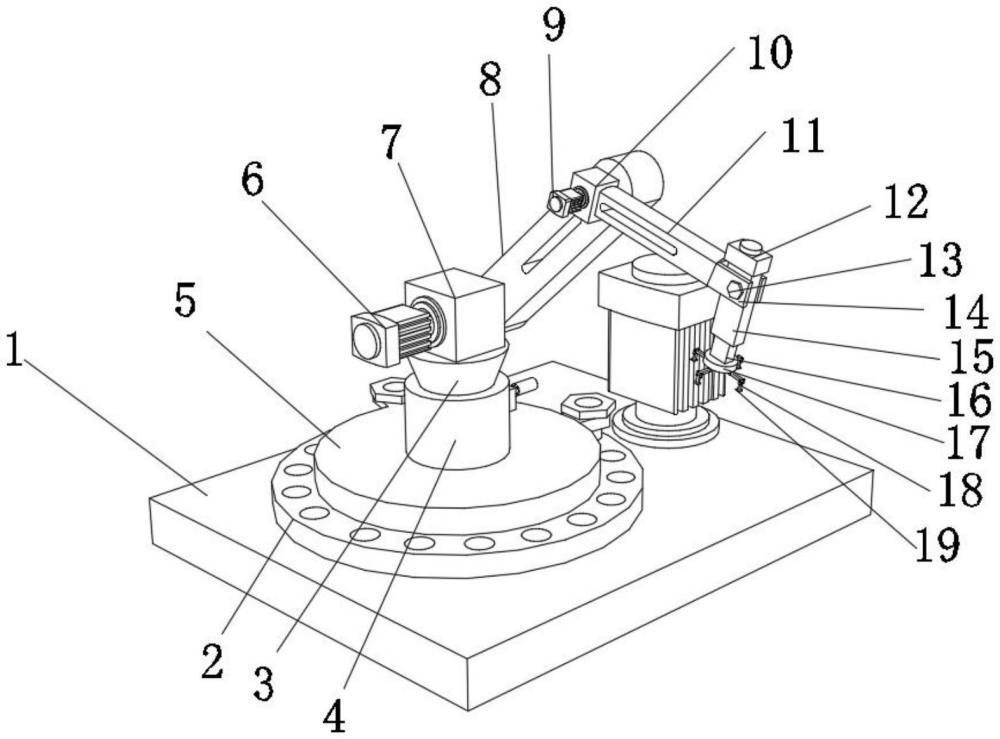
1.一种机械臂伸缩结构,包括支撑底板(1),其特征在于:所述支撑底板(1)的上端固定连接有圆形固定板(2),所述圆形固定板(2)的上端设置有旋转圆板(5),所述旋转圆板(5)的侧面固定连接有螺栓固定板(26),所述螺栓固定板(26)的表面开设有螺纹孔,所述螺纹孔内插接着固定螺栓(25),所述圆形固定板(2)的表面开设有多个孔洞,所述固定螺栓(25)的底端插接在圆形固定板(2)表面的孔洞内,所述孔洞的大小和固定螺栓(25)的大小相适配,所述旋转圆板(5)的表面固定连接有把手固定板(24),所述把手固定板(24)的侧面固定连接有把手(23),所述把手(23)的表面粘接有防滑垫(22)。
2.如权利要求1所述的一种机械臂伸缩结构,其特征在于:所述支撑底板(1)的表面位于圆形固定板(2)的相邻位置固定连接有电机固定板(21),所述电机固定板(21)的上端设置有底板电机(20)。
3.如权利要求1所述的一种机械臂伸缩结构,其特征在于:所述旋转圆板(5)的表面位于把手固定板(24)相邻的位置固定连接有连接柱(4),所述连接柱(4)的上端固定连接有支撑板(3)。
4.如权利要求3所述的一种机械臂伸缩结构,其特征在于:所述支撑板(3)的上端固定连接有固定块一(7),所述固定块一(7)的侧面设置有转动电机一(6),所述固定块一(7)的侧面位于转动电机一(6)相反的一侧滑动连接有连接板一(8)。
5.如权利要求4所述的一种机械臂伸缩结构,其特征在于:所述连接板一(8)的另一端侧面滑动连接有固定块二(10),所述固定块二(10)的侧面设置有转动电机二(9),所述固定块二(10)的侧面位于转动电机二(9)相邻的一侧设置有连接板二(11)。
6.如权利要求5所述的一种机械臂伸缩结构,其特征在于:所述连接板二(11)的另一端固定连接有凹型板(14),所述凹型板(14)内滑动连接有固定螺丝(13),所述固定螺丝(13)固定连接有连接板三(15),所述连接板三(15)的上端设置有操作电机(12)。
7.如权利要求6所述的一种机械臂伸缩结构,其特征在于:所述操作电机(12)的远离操作电机(12)的一端固定连接有延伸板(16),所述延伸板(16)的下端设置有固定圆块(17),所述固定圆块(17)的下端设置有机械爪(18),所述机械爪(18)的下面固定连接有橡胶软垫(19)。
技术总结
本申请涉及机械臂领域,公开了一种机械臂伸缩结构。本申请中,一种机械臂伸缩结构,包括支撑底板,支撑底板的上端固定连接有圆形固定板,圆形固定板的上端设置有旋转圆板,旋转圆板的侧面固定连接有螺栓固定板,螺栓固定板的表面开设有螺纹孔,螺纹孔内插接着固定螺栓,在使用机械臂伸缩结构时,可以通过把手固定板来带动旋转圆板转动,从而带动机械臂的转动,在需要转动机械臂时可以将固定螺栓从螺栓固定板中取出,然后工作人员手持电机固定板表面的防滑垫从而带动把手固定板的运动,通过使用该装置时,可以将机械臂结构转到需要作业的位置,可以满足不同情况中的仪器作业,方便工作人员操作仪器进行作业,节省时间,提高工作效率。
技术研发人员:袁建军,鲍晟,韩志成,赵梦洁,傅馨菊
受保护的技术使用者:苏州伸之助科技服务有限公司
技术研发日:20230723
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!