一种自动安装卡件桁架机器人的制作方法
本技术涉及膜卷生产,尤其是一种自动安装卡件桁架机器人。
背景技术:
1、为了保护电气设备,往往会在电气设备中使用聚酯薄膜来覆盖重要部位,起到绝缘、透光、美观等功能,聚酯薄膜在生产出来后需要先收卷,再打包最后进行运输,在打包完成后需要将其吊装到下一生产线中,在吊装之前需要在膜卷两侧装上木质夹板用来保护膜卷,为了方便运输和存放,一般对包装好的膜卷进行叠放以节省空间,由于膜卷两端安装了较薄的木质夹板,在叠放时需要精准对齐,否则容易出现倒塌损伤膜卷的风险,因此目前多在木质夹板上放置卡件,通过卡件增加木质夹板之间的稳定性,安装卡件一般需要两名工人在膜卷的两边安装卡件,这种方法浪费人力,且在生产线上工作具有一定的危险性。
技术实现思路
1、本实用新型要解决的技术问题是:现有的安装方式为人工手动安装,需要两名工人配合,这种方式效率低,在生产线上操作具有一定的危险性。
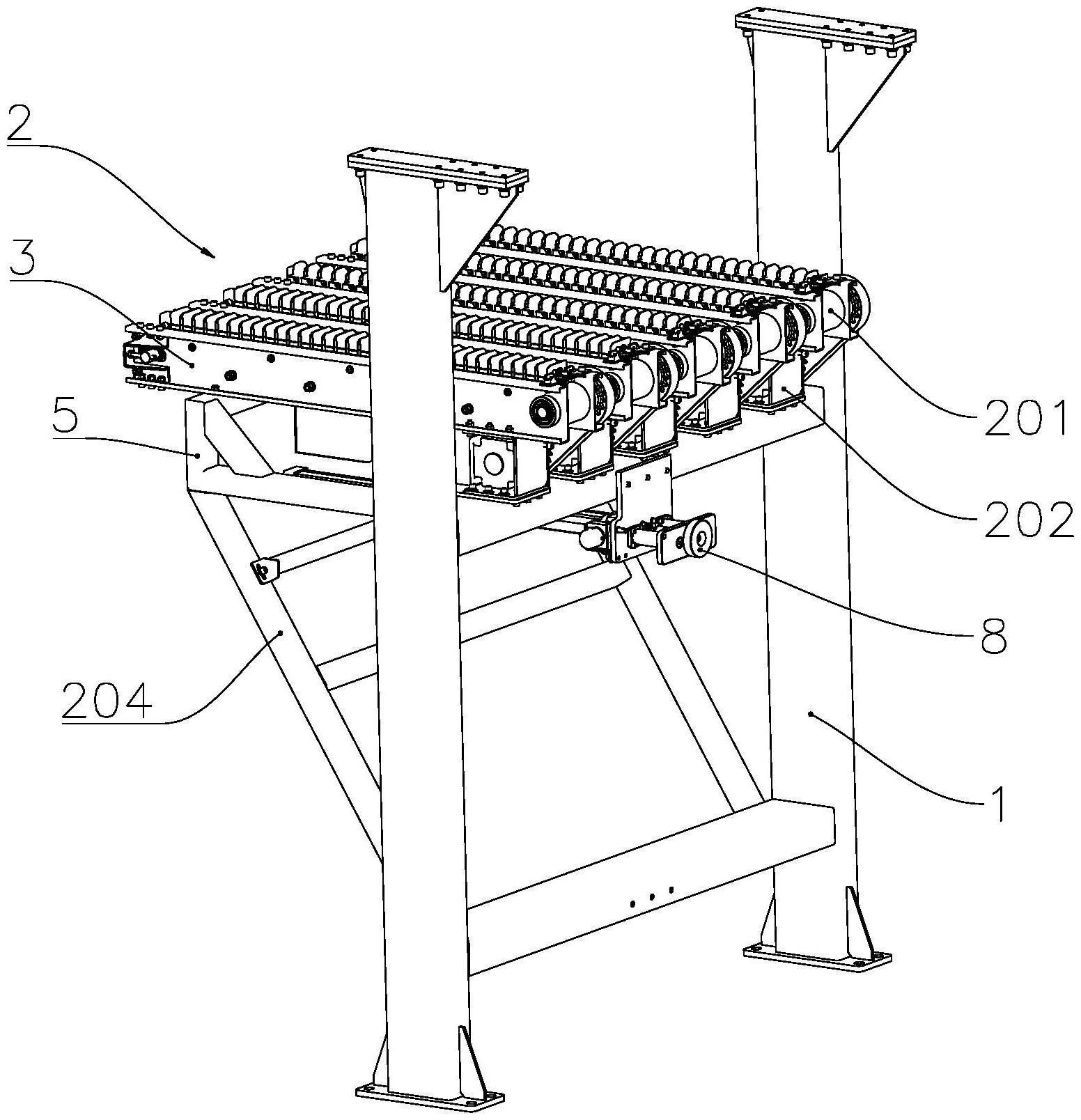
2、本实用新型解决其技术问题所采用的技术方案是:本实用新型提供一种自动安装卡件桁架机器人,包括支撑架、卡件传输器、卡件夹取器,所述支撑架为四脚支架,所述支撑架顶部设置有滑轨,所述支撑架的支撑脚中段和底段之间分别连接有第一固定杆和第二固定杆,所述卡件传输器包括传送带、驱动电机、光电传感器和安装架,所述安装架呈“”字形,所述安装架上安装有若干传送带,所述传送带两侧设置有固定传送带的皮带架,所述皮带架固定安装在驱动电机上,皮带架所述传送带与驱动电机动力连接,所述光电传感器安装在传送带的一端,所述卡件夹取器包括升降夹取臂、横移臂和升降器,所述横移臂上下两端均设置有导轨,所述升降器安装在横移臂的导轨上,所述升降夹取臂安装在升降器中,所述升降夹取臂底部设置有夹取爪,所述卡件夹取器的横移臂安装在支撑架顶部的滑轨上,所述驱动电机安装在第一固定杆上,所述安装架两端分别与第一固定杆和第二固定杆固定连接,所述传送带一端位于支撑架框架内。
3、优选的,所述“”字形安装架顶部一端设置有安装桁架,所述皮带架设置在安装衍架上。安装桁架用于安装皮带架。
4、优选的,若干所述传送带两端的皮带架间距不同。间距不同的皮带架中可以防止不同规格的卡件,能使设备根据需求选择不同的卡件安装
5、优选的,所述皮带架一端的顶部固定有阻拦板,所述阻拦板上固定安装有光电传感器,所述阻拦板一侧设置有磁性块。光电传感器用于检测皮带架中是否还有卡件,磁性块用于吸附卡件,防止卡件在被夹取时发生位移。
6、优选的,两个所述第一固定杆底部相对设置有接触距离传感器。接触距离传感器用于确认当前膜卷规格和测量卡件的安装距离。
7、优选的,所述升降夹取臂底部一侧设置有摄像云台,所述摄像云台位于近卡件传输器。摄像云台用于识别是否夹取了卡件
8、优选的,所述升降器包括夹轨器、升降轮和升降电机,所述夹轨器夹住升降夹取臂一侧,所述升降轮紧贴升降夹取臂另一侧,所述升降电机与升降轮动力连接。夹轨器用于夹住升降夹取臂,升降轮用于带动升降夹取臂上下位移。
9、优选的,所述横移臂(402)顶部两端设置有横移带(13),所述横移带(13)与升降器(403)固定连接,所述横移带(13)一端动力连接有横移电机(14)。安装块的外形设计方式可以满足正反装配均可使用,提高了工装的使用率减少成本。
10、本实用新型的有益效果是:本实用新型提供的一种自动安装卡件桁架机器人,通过卡件传输器、卡件夹取器的配合,在卡件传输器上放置不同规格的卡件没通过卡件夹取器自动夹取和放置,解决了人工安装效率不高,容易安装错不同规格卡件,同时无人操作杜绝危险情况的发生,可以通过接触距离传感器确认当前膜卷规格和测量卡件的安装距离,用光电传感器检测皮带架中是否还有卡件,磁性块用于吸附卡件,防止卡件在被夹取时发生位移。
技术特征:
1.一种自动安装卡件桁架机器人,其特征在于:包括,
2.如权利要求1所述的一种自动安装卡件桁架机器人,其特征在于:所述“7”字形安装架(204)顶部一端设置有安装桁架(5),所述皮带架(3)设置在安装桁架(5)上。
3.如权利要求2所述的一种自动安装卡件桁架机器人,其特征在于:若干所述传送带(201)两端的皮带架(3)间距不同。
4.如权利要求1所述的一种自动安装卡件桁架机器人,其特征在于:所述皮带架(3)一端的顶部固定有阻拦板(6),所述阻拦板(6)上固定安装有光电传感器(203),所述阻拦板(6)一侧设置有磁性块(7)。
5.如权利要求4所述的一种自动安装卡件桁架机器人,其特征在于:两个所述第一固定杆(102)底部相对设置有接触距离传感器(8)。
6.如权利要求1所述的一种自动安装卡件桁架机器人,其特征在于:所述升降夹取臂(401)底部一侧设置有摄像云台(9),所述摄像云台(9)位于近卡件传输器(2)。
7.如权利要求1所述的一种自动安装卡件桁架机器人,其特征在于:所述升降器(403)包括夹轨器(10)、升降轮(11)和升降电机(12),所述夹轨器(10)夹住升降夹取臂(401)一侧,所述升降轮(11)紧贴升降夹取臂(401)另一侧,所述升降电机(12)与升降轮(11)动力连接。
8.如权利要求1所述的一种自动安装卡件桁架机器人,其特征在于:所述横移臂(402)顶部两端设置有横移带(13),所述横移带(13)与升降器(403)固定连接,所述横移带(13)一端动力连接有横移电机(14)。
技术总结
本技术涉及膜卷生产技术领域,尤其是一种自动安装卡件桁架机器人,为了方便膜卷的运输和存放,需要在木质夹板上放置卡件,安装卡件一般需要两名工人在膜卷的两边安装卡件,这种方法浪费人力,且在生产线上工作具有一定的危险性,为了解决上述问题本技术提供一种自动安装卡件桁架机器人,包括支撑架、卡件传输器、卡件夹取器,通过卡件传输器、卡件夹取器的配合,将卡件夹取到木质夹板上,解决了人工安装效率不高,容易安装错不同规格卡件,同时无人操作杜绝危险情况的发生。
技术研发人员:姚庆,查晶军,陈科名
受保护的技术使用者:江苏裕兴薄膜科技股份有限公司
技术研发日:20230721
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!