一种转动式机械臂的制作方法
本技术涉及机械臂,尤其是一种转动式机械臂。
背景技术:
1、随着自动化技术的不断发展,机器人的应用越来越广泛,从太空飞船的空间作业机器人到日常生活中的扫地机器人,机器人真正的走进了各行各业,每家每户,真正作为生产力而存在的机器人时工业生产中使用的机器人,工业上使用的机器人可以在高温,辐射,有毒等恶劣环境下长时间稳定状态工作或是在流水线上从事极度枯燥的机械性重复工作,极大地解放了人工劳动力,使得珍贵的人工资源可以更多的在较为舒适的环境中从事于创造和设计性质的工作,工业上使用的机器人功能强大,带负载能力很强,有很多还拥有人机协作的能力辅助人类工作。
2、但是现有的机械臂不便进行夹持物料进行送料,而且现有转动式机械臂不便推动夹块进行垂直上下移动,导致在夹取物料时容易出现偏差的情况,从而大幅降低了设备的实用性,为此,我们提出一种转动式机械臂解决上述问题。
技术实现思路
1、本实用新型的目的在于提供一种转动式机械臂,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
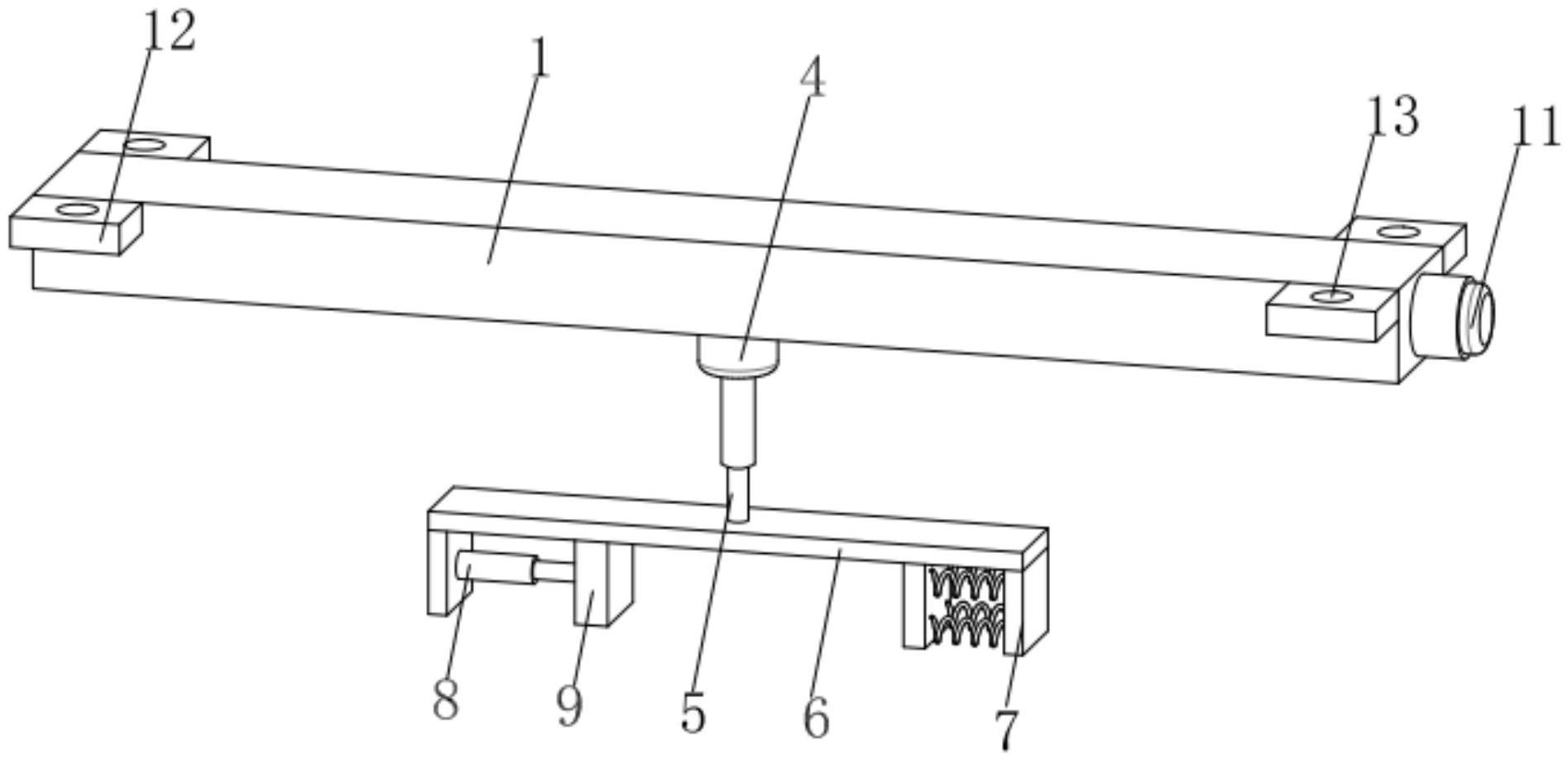
3、一种转动式机械臂,包括行走轨道,所述行走轨道的底面开设有滑槽,所述滑槽的内部滑动连接有滑块,所述滑块的底面固定连接有第一旋转电机,所述第一旋转电机的输出端固定连接有第一电动伸缩杆,所述第一电动伸缩杆的输出端固定连接有支撑板,所述支撑板的底面固定连接有两个挡板,其中一个所述挡板的右侧面固定连接有第二电动伸缩杆,其中一个所述挡板的左侧面固定连接有两组弹簧,所述行走轨道的右侧面固定连接有第二旋转电机。
4、在进一步的实施例中,所述第二电动伸缩杆的输出端和两组弹簧的右端均固定连接有机械臂夹板,两个所述机械臂夹板相互靠近的一侧面均固定连接有防滑漆面。
5、在进一步的实施例中,所述滑槽的内部固定镶嵌有两个轴承,两个所述轴承的内圈共同固定连接有螺纹杆。
6、在进一步的实施例中,所述滑块的左侧面开设有螺纹孔,所述螺纹孔的内壁与螺纹杆的外表面螺纹连接。
7、在进一步的实施例中,所述行走轨道的正面和行走轨道的背面均固定连接有两个安装板,每个所述安装板的上表面均开设有安装孔。
8、在进一步的实施例中,所述行走轨道的右侧面固定连接有圆管,所述圆管的内壁与第二旋转电机的外表面固定连接。
9、与现有技术相比,本实用新型的有益效果是:
10、本装置通过滑槽、滑块、第一旋转电机、第一电动伸缩杆和支撑板的配合,不仅可以使机械臂夹板能够进行转动,而且可以使机械臂夹板能够进行移动,挡板、第二电动伸缩杆、机械臂夹板、弹簧、第二旋转电机,不仅可以使机械臂夹板能够进行转动,而且可以对夹持物的外表面进行保护。
技术特征:
1.一种转动式机械臂,其特征在于:包括行走轨道(1),所述行走轨道(1)的底面开设有滑槽(2),所述滑槽(2)的内部滑动连接有滑块(3),所述滑块(3)的底面固定连接有第一旋转电机(4),所述第一旋转电机(4)的输出端固定连接有第一电动伸缩杆(5),所述第一电动伸缩杆(5)的输出端固定连接有支撑板(6),所述支撑板(6)的底面固定连接有两个挡板(7),其中一个所述挡板(7)的右侧面固定连接有第二电动伸缩杆(8),其中一个所述挡板(7)的左侧面固定连接有两组弹簧(10),所述行走轨道(1)的右侧面固定连接有第二旋转电机(11)。
2.根据权利要求1所述的一种转动式机械臂,其特征在于:所述第二电动伸缩杆(8)的输出端和两组弹簧(10)的右端均固定连接有机械臂夹板(9),两个所述机械臂夹板(9)相互靠近的一侧面均固定连接有防滑漆面。
3.根据权利要求1所述的一种转动式机械臂,其特征在于:所述滑槽(2)的内部固定镶嵌有两个轴承(14),两个所述轴承(14)的内圈共同固定连接有螺纹杆(15)。
4.根据权利要求1所述的一种转动式机械臂,其特征在于:所述滑块(3)的左侧面开设有螺纹孔(16),所述螺纹孔(16)的内壁与螺纹杆(15)的外表面螺纹连接。
5.根据权利要求1所述的一种转动式机械臂,其特征在于:所述行走轨道(1)的正面和行走轨道(1)的背面均固定连接有两个安装板(12),每个所述安装板(12)的上表面均开设有安装孔(13)。
6.根据权利要求1所述的一种转动式机械臂,其特征在于:所述行走轨道(1)的右侧面固定连接有圆管(17),所述圆管(17)的内壁与第二旋转电机(11)的外表面固定连接。
技术总结
本技术公开了一种转动式机械臂,包括行走轨道,所述行走轨道的底面开设有滑槽,所述滑槽的内部滑动连接有滑块,所述滑块的底面固定连接有第一旋转电机,所述第一旋转电机的输出端固定连接有第一电动伸缩杆,所述第一电动伸缩杆的输出端固定连接有支撑板,所述支撑板的底面固定连接有两个挡板,其中一个所述挡板的右侧面固定连接有第二电动伸缩杆,本装置通过滑槽、滑块、第一旋转电机、第一电动伸缩杆和支撑板的配合,不仅可以使机械臂夹板能够进行转动,而且可以使机械臂夹板能够进行移动,挡板、第二电动伸缩杆、机械臂夹板、弹簧、第二旋转电机,不仅可以使机械臂夹板能够进行转动,而且可以对夹持物的外表面进行保护。
技术研发人员:张汉明,农色兵,唐兰花,黄创
受保护的技术使用者:桂林海纳科技有限公司
技术研发日:20230725
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!