一种用于晶圆分选设备的磁吸机械臂的制作方法
本技术涉及集成电路生产设备,尤其涉及一种用于晶圆分选设备的磁吸机械臂。
背景技术:
1、专利文献cn214588780u公开一种晶圆片移送装置,是一种机械臂,其包括支承装配组件、升降调节组件、升降驱动组件、偏转调节组件、偏转驱动组件及片体取放组件,支承装配组件中具有安装空间,升降调节组件安装于支承装配组件中,升降驱动组件安装于支承装配组件中,并与升降调节组件衔接,偏转调节组件安装于升降调节组件中,偏转驱动组件安装于升降调节组件中,并与偏转调节组件衔接,片体取放组件安装于偏转调节组件中,片体取放组件采用一对抓取手臂及片体抓手组成,片体抓手之间可相互接力配合,各片体抓手需要运行的范围更小,并且可配合形成更多的移送方式,使用更为灵活,有利于提升晶圆片的移送效率。然而,这种机械臂的晶圆取放手臂固定安装在双关节机械臂上,不能轻易移动,在发生故障或调试过程中误撞等情况时,容易导致整个机械臂的原点发生偏移,需要重新调试。因此,有必要对这种机械臂进行结构优化,以克服上述缺陷。
技术实现思路
1、本实用新型的目的是提供一种用于晶圆分选设备的磁吸机械臂,以减少运行故障,提高生产稳定性。
2、本实用新型为解决其技术问题所采用的技术方案是:
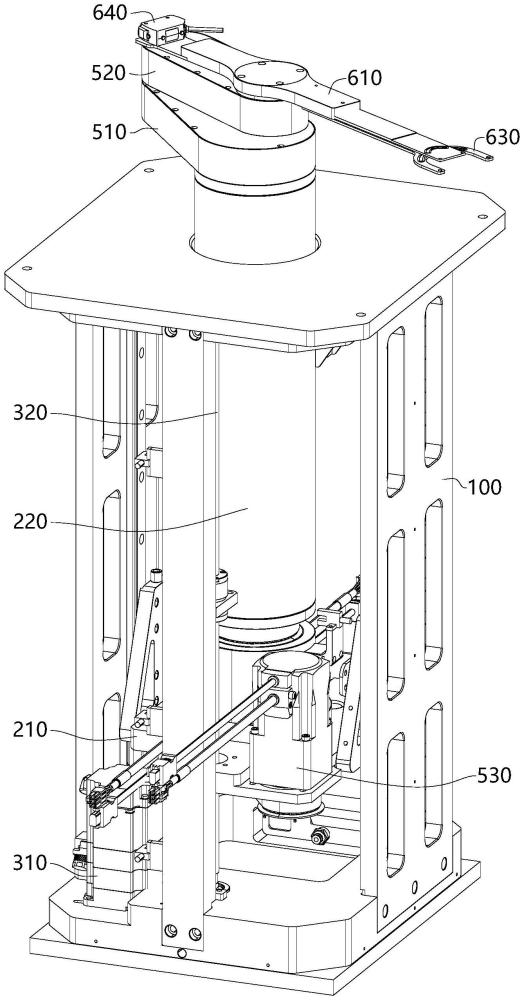
3、一种用于晶圆分选设备的磁吸机械臂,包括:
4、支承装配组件,该支承装配组件中具有安装空间;
5、转接支托组件,该转接支托组件通过活动结构安装于支承装配组件中,可在支承装配组件中运动;
6、升降驱动组件,该升降驱动组件安装于转接支托组件中,由升降驱动组件带动转接支托组件在支承装配组件中做升降运动;
7、旋转驱动组件,该旋转驱动组件安装于转接支托组件中,由旋转驱动组件带动转接支托组件在支承装配组件中做旋转运动;
8、关节悬臂组件,该关节悬臂组件安装于转接支托组件中,可随转接支托组件一同做升降及旋转运动;
9、晶圆取放组件,该晶圆取放组件通过磁吸结构安装于关节悬臂组件上,可随关节悬臂组件一同做升降及旋转运动,由晶圆取放组件对晶圆进行取放操作。
10、具体地,支承装配组件包括:
11、支承框架,该支承框架采用板件接合形成,在其内部形成安装空间。
12、转接支托组件包括:
13、转接座体,该转接座体通过竖向轨道安装于支承框架中,可在支承框架中上升或下降;
14、支托筒体,该支托筒体底端通过轴承安装于转接座体上,可随转接座体一同上升或下降,并可在转接座体上转动,其顶端贯穿支承框架顶部后向支承框架上方延伸。
15、升降驱动组件包括:
16、升降电机,该升降电机安装于支承框架中;
17、驱动丝杆,该驱动丝杆沿竖向布置,其两端通过转动结构安装于支承框架中,升降电机通过传动结构与驱动丝杆配合,可带动驱动丝杆转动,转接座体通过传动螺母与驱动丝杆配合,升降电机通过驱动丝杆带动转接座体及支托筒体上升或下降。
18、旋转驱动组件包括:
19、旋转电机,该旋转电机安装于转接座体上,可随转接座体一同上升或下降,支托筒体通过传动结构与旋转电机配合,由旋转电机带动支托筒体在转接座体上旋转。
20、关节悬臂组件包括:
21、固定臂节,该固定臂节固定安装于支托筒体上,可随支托筒体一同运动;
22、活动臂节,该活动臂节通过转动结构安装于固定臂接上,可随固定臂节一同运动;
23、悬臂电机,该悬臂电机安装于转接座体上,并通过安装于支托筒体及固定臂节内部的悬臂传动结构与活动臂节配合,由悬臂电机带动活动臂节在固定臂节上转动。
24、晶圆取放组件包括:
25、取放臂节,该取放臂节通过转动结构安装于活动臂节上,可随活动臂节一同运动;
26、吸合磁块,该吸合磁块安装于取放臂节末端,可随取放臂节一同运动;
27、吸片臂节,该吸片臂节通过吸合磁块安装于取放臂节末端,可随取放臂节一同运动,其还通过管路与真空泵连通,由吸片臂节对晶圆片进行吸附和释放。
28、取放臂节上还设有检测传感器,检测传感器与吸片臂节分列于吸片臂节两端,由检测传感器对晶圆片的位置及数量进行检测。
29、本实用新型的优点在于:
30、该磁吸机械臂的吸片臂节通过吸合磁块安装在取放臂节末端,可随固定臂节及活动臂节一同运动,完成正常的取片与放片工作,当取片臂节发生硬性碰撞时,碰撞力大于磁吸力,吸片臂节会从取片臂节上脱落,不会导致固定臂节、活动臂节及其他部位发生位移或变形,无需在碰撞后对整台设备进行重新调试,使晶圆片取放操作连续运行,可保障晶圆片检测或加工过程的持续性,进而提升检测或加工过程的稳定性,最终提升集成电路的质量。
技术特征:
1.一种用于晶圆分选设备的磁吸机械臂,其特征在于,包括:
2.根据权利要求1所述的一种用于晶圆分选设备的磁吸机械臂,其特征在于,支承装配组件包括:
3.根据权利要求2所述的一种用于晶圆分选设备的磁吸机械臂,其特征在于,转接支托组件包括:
4.根据权利要求3所述的一种用于晶圆分选设备的磁吸机械臂,其特征在于,升降驱动组件包括:
5.根据权利要求4所述的一种用于晶圆分选设备的磁吸机械臂,其特征在于,旋转驱动组件包括:
6.根据权利要求3所述的一种用于晶圆分选设备的磁吸机械臂,其特征在于,关节悬臂组件包括:
7.根据权利要求6所述的一种用于晶圆分选设备的磁吸机械臂,其特征在于,晶圆取放组件包括:
8.根据权利要求7所述的一种用于晶圆分选设备的磁吸机械臂,其特征在于:
技术总结
本技术提出一种用于晶圆分选设备的磁吸机械臂,其包括支承装配组件、转接支托组件、升降驱动组件、旋转驱动组件、关节悬臂组件及晶圆取放组件,该磁吸机械臂的吸片臂节通过吸合磁块安装在取放臂节末端,可随固定臂节及活动臂节一同运动,完成正常的取片与放片工作,当取片臂节发生硬性碰撞时,碰撞力大于磁吸力,吸片臂节会从取片臂节上脱落,不会导致固定臂节、活动臂节及其他部位发生位移或变形,无需在碰撞后对整台设备进行重新调试,使晶圆片取放操作连续运行,可保障晶圆片检测或加工过程的持续性,进而提升检测或加工过程的稳定性,最终提升集成电路的质量。
技术研发人员:徐鑫
受保护的技术使用者:嘉兴微拓电子科技股份有限公司
技术研发日:20230725
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!