一种信号机房巡检机器人的制作方法
本技术涉及巡检机器人,尤其涉及一种信号机房巡检机器人。
背景技术:
1、目前铁路延线信号机房内,有很多关键设备的信号指示灯、指示牌、空气开关等仪器仪表,这些仪器仪表所指示的状态反应了铁路延线设备的工作状态,对生产安全至关重要,因此,需要对铁路信号机房进行巡回检查。铁路信号机房的例行巡回检查的目的是为了主动掌握系统设备的运行情况;定时定期的循坏检查,能及时发现异常情况和消除设备缺陷,减少事故隐患,确保安全运行,常见的都会使用巡检机器人进行自动化巡检。
2、但是巡检机器人在日常使用过程中,缺少相应的防护装置,使得其上设置的摄像头容易附着水分或者灰尘导致拍摄的画面不够清晰,因此我们提出一种信号机房巡检机器人,用于解决上述所提出的问题。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在巡检机器人在日常使用过程中,缺少相应的防护装置,使得其上设置的摄像头容易附着水分或者灰尘导致拍摄的画面不够清晰的缺点,而提出的一种信号机房巡检机器人。
2、为了实现上述目的,本实用新型采用了如下技术方案:
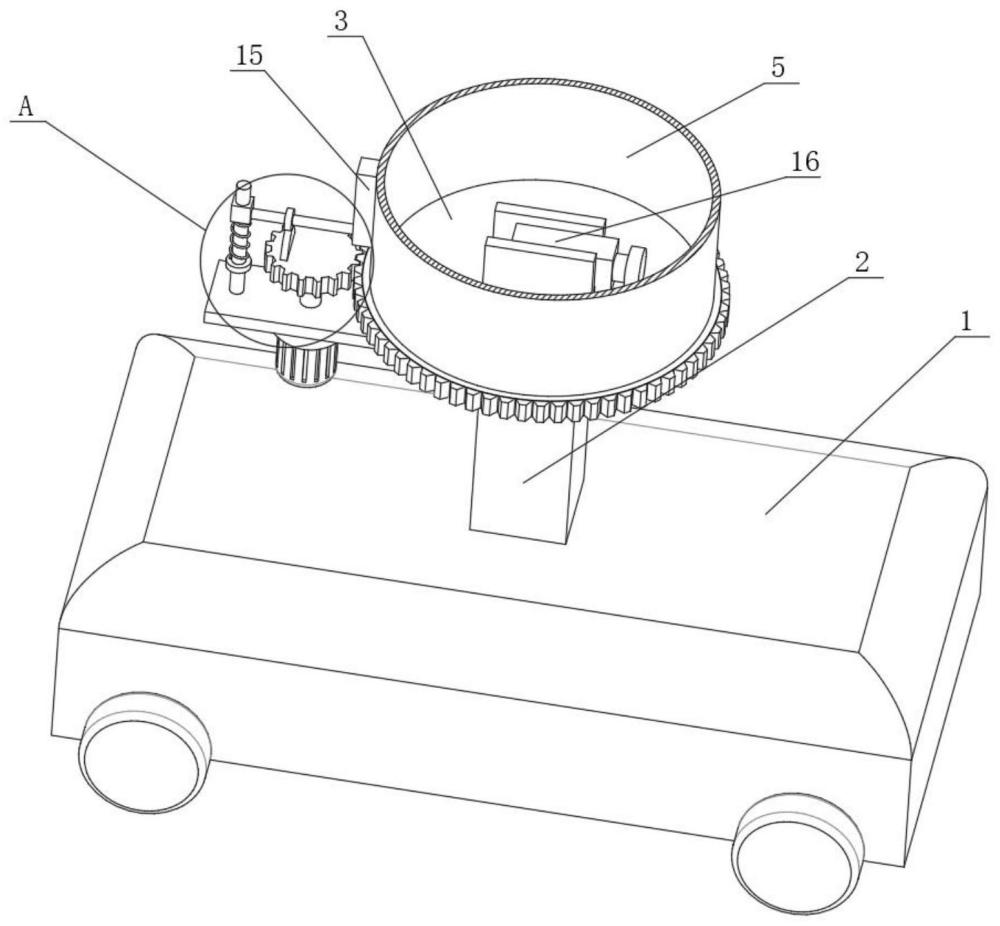
3、一种信号机房巡检机器人,包括电动车体,所述电动车体的顶部固定安装有支撑座,且支撑座的顶部固定安装有支撑板,支撑板的顶部安装有摄像头,支撑板的外侧连接有传动组件,传动组件上安装有防护罩支撑座的左侧固定安装有安装板,且安装板的底部左侧固定安装有驱动电机,驱动电机的输出轴延伸至安装板的上方并与传动组件相连接;
4、安装板的顶部安装有限位组件,限位组件上连接有推动组件,推动组件与传动组件相连接,推动组件上安装有清洁刷,且清洁刷与防护罩的侧面相接触。
5、借由上述结构,在将摄像头设置在防护罩内,能够实现对摄像头进行防尘保护,并且在启动驱动电机带动传动组件进行运转,以此能够带动防护罩进行转动,便可使得防护罩的外侧面与清洁刷保持接触,以此能够实现对防护罩进行清扫,并且在传动组件的传动作用下,能够带动清洁刷进行纵向往复运动,以便能够提升对防护罩的清理效果,所以具有良好的实用性。
6、优选的,所述传动组件包括齿环和齿轮;
7、齿环转动套设在支撑板的外侧,防护罩固定安装在齿环的顶部,齿轮与驱动电机的输出轴固定连接,且齿轮与齿环相啮合,推动组件与齿轮的顶部相连接。
8、进一步的,在齿轮随着驱动电机的输出轴进行转动时,可在齿环的啮合传动作用下,能够带动防护罩进行转动。
9、优选的,所述限位组件包括限位杆和限位环;
10、限位杆固定安装在安装板的顶部左侧,且限位环滑动套设在限位杆上,推动组件与限位环的右侧相连接。
11、进一步的,利用限位杆和限位环能够通过推动组件的连接作用下,能够对清洁刷进行纵向滑动限位。
12、优选的,所述限位杆上套设有位于限位环下方的拉伸弹簧,且拉伸弹簧的顶端和底端分别与限位环的底部和限位杆固定连接。
13、进一步的,利用拉伸弹簧的弹力能够拉动限位环向下复位移动,以此可通过推动组件带动清洁刷向下移动。
14、优选的,所述推动组件包括连接杆和弧型板;
15、连接杆固定安装在限位环的右侧,连接杆的右端与清洁刷的左侧底部固定连接,弧型板固定安装在齿轮的顶部偏心位置上,弧型板与连接杆传动配合。
16、进一步的,利用连接杆和弧型板的配合能够对清洁刷提供向上的推力。
17、优选的,所述连接杆上转动套设有传动轮,且传动轮与弧型板的弧型曲面相接触。
18、进一步的,利用传动轮在与弧型板的曲面接触后,能够方便推动清洁刷向上移动,以此能够使得清洁刷进行纵向移动。
19、有益效果:
20、1、本技术方案在日常使用过程中,摄像头设置在防护罩的覆盖范围内,以此能够利用防护罩对摄像头进行防尘保护,使得摄像头在日常拍摄过程中,不会出现视频模糊的问题;
21、2、在防护罩使用过程中,需要对附着在其上的粉尘进行清理,此时可启动驱动电机带动齿轮进行转动,此时在与齿环的啮合传动作用下,能够带动防护罩进行转动,就即使得防护罩的侧面与清洁刷保持接触,便可利用清洁刷能够对防护罩的侧面进行清理;
22、3、在齿轮进行转动时,可带动弧型板进行环形运动,此时在弧型板的圆弧曲面与传动轮保持接触后,能够推动连接杆向上移动,以此能够带动清洁刷向上移动,并且在连接杆向上移动时,可使得拉伸弹簧处于受力状态,所以在弧型板与传动轮脱离接触后,处于受力状态的拉伸弹簧能够带动限位环向下移动,以此能够使得清洁刷向下移动,因此在清洁刷不断的纵向往复运动的情况下,能够对防护罩进行摩擦,以此能够提升对防护罩的清洁效果。
23、本实用新型在利用防护罩对摄像头进行防护,能够避免摄像头受到粉尘的干扰,并且通过启动驱动电机能够实现对防护罩的侧面进行清洁,以此不会影响到摄像头的拍摄,所以具有良好的实用性。
技术特征:
1.一种信号机房巡检机器人,包括电动车体(1),其特征在于,所述电动车体(1)的顶部固定安装有支撑座(2),且支撑座(2)的顶部固定安装有支撑板(3),支撑板(3)的顶部安装有摄像头(16),支撑板(3)的外侧连接有传动组件,传动组件上安装有防护罩(5)支撑座(2)的左侧固定安装有安装板(6),且安装板(6)的底部左侧固定安装有驱动电机(7),驱动电机(7)的输出轴延伸至安装板(6)的上方并与传动组件相连接;
2.根据权利要求1所述的信号机房巡检机器人,其特征在于,所述传动组件包括齿环(4)和齿轮(8);
3.根据权利要求1所述的信号机房巡检机器人,其特征在于,所述限位组件包括限位杆(9)和限位环(10);
4.根据权利要求3所述的信号机房巡检机器人,其特征在于,所述限位杆(9)上套设有位于限位环(10)下方的拉伸弹簧(14),且拉伸弹簧(14)的顶端和底端分别与限位环(10)的底部和限位杆(9)固定连接。
5.根据权利要求1所述的信号机房巡检机器人,其特征在于,所述推动组件包括连接杆(11)和弧型板(13);
6.根据权利要求5所述的信号机房巡检机器人,其特征在于,所述连接杆(11)上转动套设有传动轮(12),且传动轮(12)与弧型板(13)的弧型曲面相接触。
技术总结
本技术属于巡检机器人技术领域,尤其是一种信号机房巡检机器人,针对现有的巡检机器人在日常使用过程中,缺少相应的防护装置,使得其上设置的摄像头容易附着水分或者灰尘导致拍摄的画面不够清晰的问题,现提出如下方案,其包括电动车体,所述电动车体的顶部固定安装有支撑座,且支撑座的顶部固定安装有支撑板,支撑板的顶部安装有摄像头,支撑板的外侧连接有传动组件,传动组件上安装有防护罩支撑座的左侧固定安装有安装板,本技术在利用防护罩对摄像头进行防护,能够避免摄像头受到粉尘的干扰,并且通过启动驱动电机能够实现对防护罩的侧面进行清洁,以此不会影响到摄像头的拍摄,所以具有良好的实用性。
技术研发人员:马前锋,康清国,张卫民,徐宏亮,杨生伟,王红
受保护的技术使用者:河南胜之源智能科技有限公司
技术研发日:20230727
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!