一种可旋转的机械手的制作方法
本技术属于自动化机械装置,具体涉及一种可旋转的机械手。
背景技术:
1、机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。机械手可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。在自动化生产加工过程中,存在大量需要使用机械手进行夹紧零件或产品进行旋转的情形,如拧松螺母、拧松螺钉和旋紧瓶盖等。
2、申请号为cn202122128582.x的实用新型专利中提出了一种单工位机械手,包括电机、摆动支板、预旋主动齿轮、预旋传动齿轮、旋盖芯轴、连接芯轴、旋盖头和固定盖,电机的输出端与预旋主动齿轮的轴连接,电机安装在固定盖的上方,预旋主动齿轮与预旋传动齿轮啮合,预旋主动齿轮、预旋传动齿轮和固定盖安装在摆动支板的上方,预旋主动齿轮和预旋传动齿轮位于固定盖内,预旋传动齿轮的中心安装在旋盖芯轴上,连接芯轴穿过摆动支板,连接芯轴的外圈安装旋盖芯轴,螺纹套套在旋盖芯轴和连接芯轴的外侧,连接芯轴的底部安装旋盖头。该申请中的机械手对齿轮、螺纹套、连接芯轴和旋盖芯轴的配合精密度要求较高,且使用过程中各部件产生磨损后可能会影响正常的工作过程。
技术实现思路
1、本实用新型的目的在于提供一种结构紧凑、适应性强的可旋转的机械手,以解决上述背景技术中提出的问题。
2、为达到上述技术目的,本实用新型的技术方案:
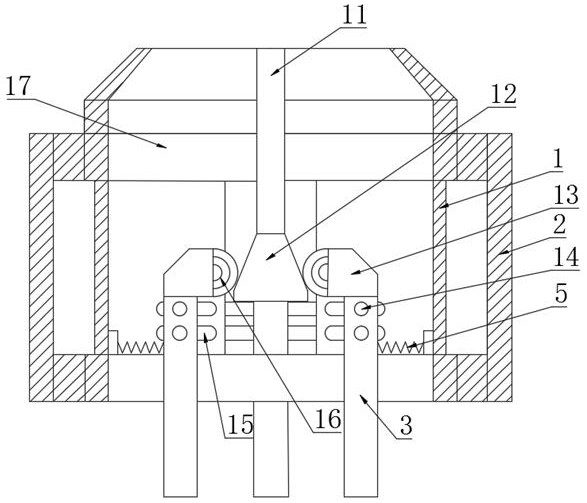
3、一种可旋转的机械手,包括安装架,所述安装架上设有夹紧组件和旋转组件,所述夹紧组件位于所述旋转组件的下方,其特征在于,所述安装架包括上部的两块相垂直的安装板,所述安装板底部设有安装座,所述夹紧组件包括内筒体和外筒体,所述外筒体固定安装在所述安装座的内侧,所述外筒体的内部通过第一轴承转动安装所述内筒体,所述内筒体内部滑动设有四个呈正方形分布的夹紧块,所述夹紧块的底部向下延伸位于所述内筒体的外部,四个所述夹紧块的内壁之间形成空腔,所述夹紧块靠近所述内筒体的一侧与所述内筒体的内侧壁之间设有压簧;
4、所述安装座的上方固定设有气缸,所述气缸的推杆竖直向下并且底部连接升降杆,所述升降杆的底部设有圆台,所述圆台的直径由上到下逐渐增大,所述夹紧块的上端设有凸块,所述圆台位于所述空腔内并与所述凸块相配合滑动连接;
5、所述旋转组件包括电机,所述电机固定安装在所述安装板的上部,所述电机的输出轴竖直向下且连接第一锥齿轮,所述第一锥齿轮啮合连接第二锥齿轮,所述第二锥齿轮啮合连接第三锥齿轮,所述第一锥齿轮与所述第三锥齿轮平行且均为水平设置,所述第三锥齿轮与所述内筒体的顶部固定连接。
6、作为一种改进,所述夹紧块上穿设有水平的定位杆,两相对的所述夹紧块中的所述定位杆平行,所述定位杆的两端延伸出所述夹紧块,所述内筒体的内壁上水平设有与定位杆相配合的滑槽,所述定位杆沿所述内筒体的径向与所述滑槽滑动配合,同一所述夹紧块上设有两个平行且位于同一竖直平面的所述定位杆。
7、作为进一步地改进,所述内筒体的内壁上设有沿周向均匀分布的四组固定件,每组所述固定件包括两个相垂直的固定板,所述固定板远离轴心的一侧连接所述内筒体的内壁,两相邻的固定件之间形成空间,所述夹紧块位于所述空间内,所述滑槽位于所述固定板上。
8、作为进一步地改进,所述凸块的中部设有凹槽,所述凹槽的内部设有竖直安装的第二轴承,所述第二轴承的外边缘突出所述凸块的边缘并与所述圆台的外壁滚动连接。
9、作为进一步地改进,所述内筒体的底部设有防护网,所述防护网上设有十字形的开口,所述夹紧块竖直穿过所述开口。
10、由于采用上述技术方案,本实用新型的有益效果:
11、本实用新型提供的可旋转的机械手,通过夹紧组件中设置可移动的夹紧块与圆台配合,将工件夹紧;通过旋转组件中设置的第一锥齿轮、第二锥齿轮和第三锥齿轮配合,带动内筒体和夹紧块同时旋转,将工件进行旋转。本实施例中的机械手结构紧凑并且外观简洁,夹紧组件中的结构发生磨损后对工作过程影响不大,实用性较强。
技术特征:
1.一种可旋转的机械手,包括安装架,所述安装架上设有夹紧组件和旋转组件,所述夹紧组件位于所述旋转组件的下方,其特征在于,所述安装架包括上部的两块相垂直的安装板,所述安装板底部设有安装座,所述夹紧组件包括内筒体和外筒体,所述外筒体固定安装在所述安装座的内侧,所述外筒体的内部通过第一轴承转动安装所述内筒体,所述内筒体内部滑动设有四个呈正方形分布的夹紧块,所述夹紧块的底部向下延伸位于所述内筒体的外部,四个所述夹紧块的内壁之间形成空腔,所述夹紧块靠近所述内筒体的一侧与所述内筒体的内侧壁之间设有压簧;
2.根据权利要求1所述的可旋转的机械手,其特征在于,所述夹紧块上穿设有水平的定位杆,两相对的所述夹紧块中的所述定位杆平行,所述定位杆的两端延伸出所述夹紧块,所述内筒体的内壁上水平设有与定位杆相配合的滑槽,所述定位杆沿所述内筒体的径向与所述滑槽滑动配合,同一所述夹紧块上设有两个平行且位于同一竖直平面的所述定位杆。
3.根据权利要求2所述的可旋转的机械手,其特征在于,所述内筒体的内壁上设有沿周向均匀分布的四组固定件,每组所述固定件包括两个相垂直的固定板,所述固定板远离轴心的一侧连接所述内筒体的内壁,两相邻的固定件之间形成空间,所述夹紧块位于所述空间内,所述滑槽位于所述固定板上。
4.根据权利要求3所述的可旋转的机械手,其特征在于,所述凸块的中部设有凹槽,所述凹槽的内部设有竖直安装的第二轴承,所述第二轴承的外边缘突出所述凸块的边缘并与所述圆台的外壁滚动连接。
5.根据权利要求1所述的可旋转的机械手,其特征在于,所述内筒体的底部设有防护网,所述防护网上设有十字形的开口,所述夹紧块竖直穿过所述开口。
技术总结
本技术属于自动化机械装置技术领域,具体涉及一种可旋转的机械手,包括安装架,安装架上设有夹紧组件和旋转组件,夹紧组件位于旋转组件的下方,夹紧组件包括内筒体、外筒体和四个夹紧块,夹紧块与内筒体的内侧壁之间设有压簧;旋转组件包括电机,电机的输出轴连接第一锥齿轮,第一锥齿轮啮合连接第二锥齿轮,第二锥齿轮的另一端啮合连接第三锥齿轮;内筒体的上方连接气缸,气缸的底部连接升降杆,升降杆的底部设有圆台,夹紧块的上端设有凸块,圆台位于空腔内并与凸块相配合滑动连接。本技术中的可旋转的机械手结构紧凑并且外观简洁,夹紧组件中的结构发生磨损后对工作过程影响不大,实用性较强。
技术研发人员:田开洋,杨明,郝树德,张军
受保护的技术使用者:潍坊索菲智能装备有限公司
技术研发日:20230801
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!