机器人的制作方法
本申请属于机器人设备,尤其涉及一种机器人。
背景技术:
1、目前,市面上应用于送餐、递送、迎宾等场景的机器人,机器人上端的头部都有很多关键电子器件,比如显示屏、人脸识别摄像头、顶视扫码摄像头、语音交互的麦克风、急停开关、灯光效果等,这些电子器件都集中在头部。机器人的功能需求越多,所需电子器件也越多,继而导致主控板上的线束接口也相对较多,线束的连接器也需要占用相对大的装配空间,此时就需要机器人的上端头部具有更大的装配空间才能满足主控板的装配需求。在现有技术中,主控板是直接固定安装在头部壳体的前壳组件的内壁上的,这就导致增加了线束接口的主控板与线束的连接器之间装配所需要的装配空间不足的情况。
2、很多生产厂家会因为机器人上端的头部放不下主控板而被迫去增加机器人上端的头部的尺寸,使得机器人的整体外观受到影响,设计不协调。
3、或者,一些生产厂家在不增大机器人上端的头部的尺寸的情况下,对线束的连接器进行弯折,然后对连接器进行强行安装完成。这使得主控板的线束接口与连接器之间始终有一个应力存在,不仅容易损坏主控板的线束接口,而且容易导致线束接口与线束的连接器之间接触不良。并且,这样的装配方式也使得线束的连接器与主控板的线束接口之间的插拔操作十分麻烦,需要将主控板完全拆卸下来才能执行插拔操作。另外,由于主控板的线束接口与连接器之间始终有一个应力存在,因此,线束的连接器需要进行打黄胶固定,这就增加了安装时间,而且由于黄胶很硬不好清除,导致后期维护、维修很不方便。
4、可见,在现有技术中,在不增加头部的外观尺寸与主控板的尺寸的前提下,如何稳定且方便地装配主控板与线束的连接器,这是亟需解决的技术难点之一。
技术实现思路
1、本申请的目的在于提供一种机器人,旨在解决现有技术中在不增加头部的外观尺寸与主控板的尺寸的前提下,如何稳定且方便地装配主控板与线束的连接器的问题。
2、为实现上述目的,本申请采用的技术方案是:一种机器人,包括:
3、机身;
4、头部壳体,包括前壳组件和后壳组件,后壳组件安装于机身的顶部,前壳组件和后壳组件相互盖合形成装配空腔;
5、支撑架,安装于前壳组件,支撑架位于装配空腔内,支撑架背离前壳组件的一侧设置为安装平面,安装平面自机身的顶部至头部壳体的方向朝后倾斜设置;
6、主控板,安装于安装平面,主控板靠近机身的顶部的一端电连接有线束,线束穿过后壳组件后平顺地延伸进机身内。
7、应用本申请实施例提供的机器人来装配布置主控板在头部壳体的装配空腔内,通过在前壳组件上增加设计支撑架,并且支撑架用于安装主控板的安装平面自机身的顶部至头部壳体的方向朝后倾斜设置,从而可以更加充分地应用装配空腔的装配空间,这样就能够在不增加头部壳体的外观尺寸的前提下将主控板完全容纳下。并且,由于安装平面进行了朝后倾斜设置,因而线束穿过后壳组件后能够平顺地延伸进机身内,相对于现有技术中对线束的连接器进行弯折后强行安装的装配方式而言,线束的连接器不仅不需要进行弯折,而是使得线束在穿过后壳组件后能够平顺地延伸进机身内,如此便避免了线束的连接器与主控板的线束接口之间产生应力,同时也能够更加方便、稳定地对线束的连接器与主控板的线束接口之间执行插拔操作。
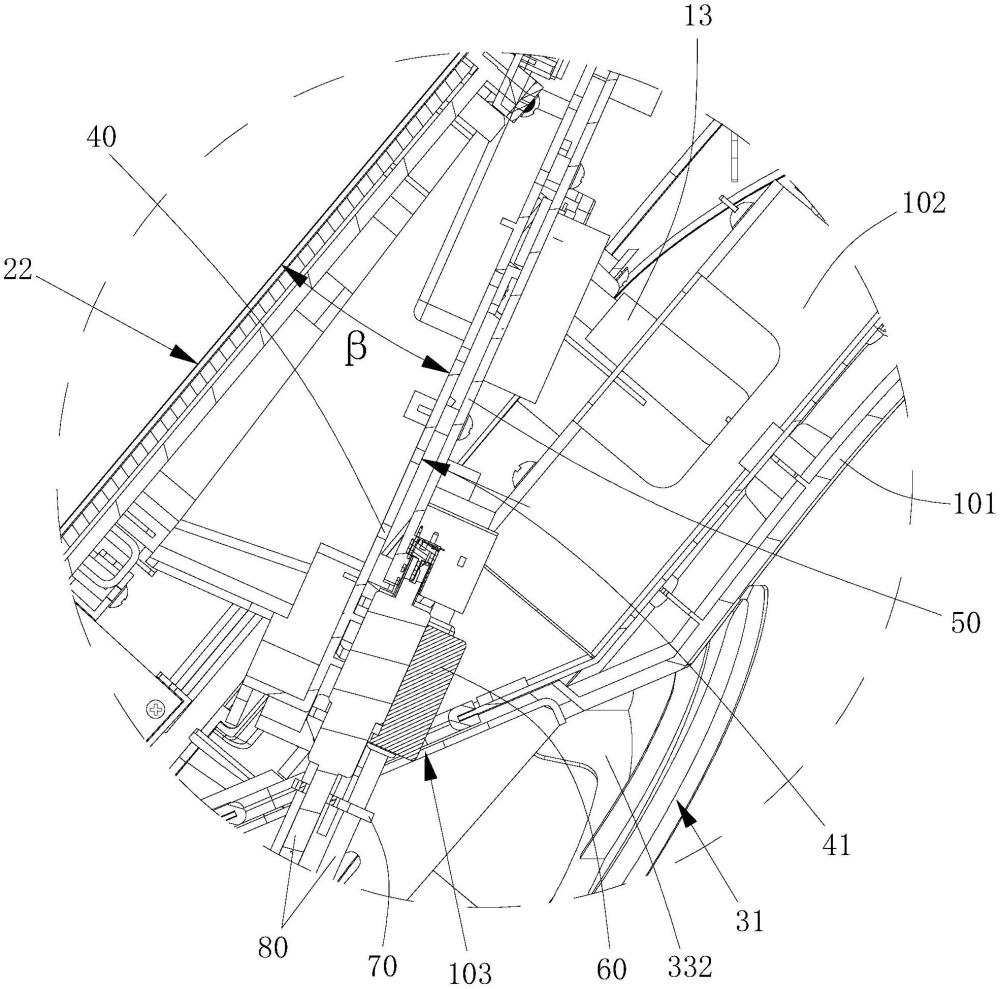
8、在一些实施例中,前壳组件设有用于安装显示屏的安装口,安装平面与显示屏的显示平面之间呈夹角β设置,其中,夹角β的开口朝向机身的顶部,10°≤β≤20°。
9、在一些实施例中,前壳组件设有用于安装显示屏的安装口,安装平面与显示屏的显示平面之间呈夹角β设置,其中,夹角β的开口朝向机身的顶部,β=16°。
10、在一些实施例中,机器人还包括线束固定架,线束固定架连接于支撑架,线束固定架用于将线束的端头夹持固定于支撑架。
11、在一些实施例中,线束固定架在前壳组件盖合于后壳组件时抵接于后壳组件。
12、在一些实施例中,后壳组件设有配合开口,线束固定架容纳于配合开口,并且线束固定架抵接于配合开口的边缘处,线束从配合开口穿过后平顺地延伸进机身内。
13、在一些实施例中,机器人还包括线束绑扎件,线束通过线束绑扎件限位固定在线束固定架上。
14、在一些实施例中,线束固定架通过螺钉锁定于支撑架。
15、在一些实施例中,后壳组件的开口的长度方向的两个侧边,自后壳组件靠近机身的一端至远离机身的一端的方向,相对于机身的高度方向向后成锐角倾斜设置;后壳组件的周向边缘设有间隔布置的多个第一卡扣,前壳组件的周向边缘设有与各个第一卡扣一一对应的第二卡扣,第一卡扣与第二卡扣相互扣合,以使前壳组件与后壳组件相互定位并盖合。
16、在一些实施例中,后壳组件的至少部分朝远离机身的方向突出于机身的顶部,并且,后壳组件的突出于机身的顶部的部分设有至少一个第一连接部,前壳组件设有与第一连接部对应的第二连接部,第一连接部与第二连接部通过连接构件锁定。
技术特征:
1.一种机器人,其特征在于,包括:
2.根据权利要求1所述的机器人,其特征在于,
3.根据权利要求1所述的机器人,其特征在于,
4.根据权利要求1-3任一项所述的机器人,其特征在于,
5.根据权利要求4所述的机器人,其特征在于,
6.根据权利要求5所述的机器人,其特征在于,
7.根据权利要求4所述的机器人,其特征在于,
8.根据权利要求4所述的机器人,其特征在于,
9.根据权利要求2或3所述的机器人,其特征在于,
10.根据权利要求9所述的机器人,其特征在于,
技术总结
本申请属于机器人设备技术领域,尤其涉及一种机器人,包括:机身;头部壳体,包括前壳组件和后壳组件,后壳组件安装于机身的顶部,前壳组件和后壳组件相互盖合形成装配空腔;支撑架,安装于前壳组件,支撑架位于装配空腔内,支撑架背离前壳组件的一侧设置为安装平面,安装平面自机身的顶部至头部壳体的方向朝后倾斜设置;主控板,安装于安装平面,主控板靠近机身的顶部的一端电连接有线束,线束穿过后壳组件后平顺地延伸进机身内。应用本申请的技术方案旨在解决现有技术中在不增加头部的外观尺寸与主控板的尺寸的前提下,如何稳定且方便地装配主控板与线束的连接器的问题。
技术研发人员:文科
受保护的技术使用者:深圳市优必选科技股份有限公司
技术研发日:20230731
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!