一种机器人末端复合夹持机构的制作方法
本技术涉及机器人末端执行器,特别涉及一种机器人末端复合夹持机构。
背景技术:
1、在当代工业中,机器人指能自动执行任务的人造机器装置,用以取代或协助人类工作,理想中的高仿真机器人是高级整合控制论、机械电子、计算机与人工智能、材料学和仿生学的产物,目前科学界正在向此方向研究开发,机器人夹持机构常用于夹持物体。
2、中国专利文献cn205363928u公开了一种机器人夹持机构,包括:机架,以及位于机架上的驱动气缸和夹持部与驱动气缸的驱动杆连接,夹持部包括夹座、双驱动件、上夹板和下夹板,双驱动件固定在夹座上,夹座的上下两侧分别设置有上导向杆和下导向杆,上夹板和下夹板分别配接在上导向杆和下导向杆上,并分别与双驱动件的上驱动杆和下驱动杆连接,上夹板的上表面和下夹板的下表面分别设置有上防护套和下防护套,上防护套上设置有若干个上弹簧孔,每个上弹簧孔内均装有一个上弹簧,下防护套上设置有若干个下弹簧孔,每个下弹簧孔内均装有一个下弹簧;但在实施过程中仍有以下缺陷:
3、上述文献中的装置虽然在夹持物品时能够有效防止上夹板和下夹板夹伤物体,但是上述文献中的机器人夹持机构在面对不同的作业对象时需要配备不同的夹持机构,每更换一次作业对象都要重新置换夹,由于需要频繁根据作业对象更换夹具,导致机器人的有效利用时间大幅缩短,不利于工作效率的提高。
技术实现思路
1、本实用新型的主要目的在于提供一种机器人末端复合夹持机构,可以有效解决面对不同作业对象时需要频繁的更换夹具,造成大量时间浪费的问题。
2、为实现上述目的,本实用新型采取的技术方案为:
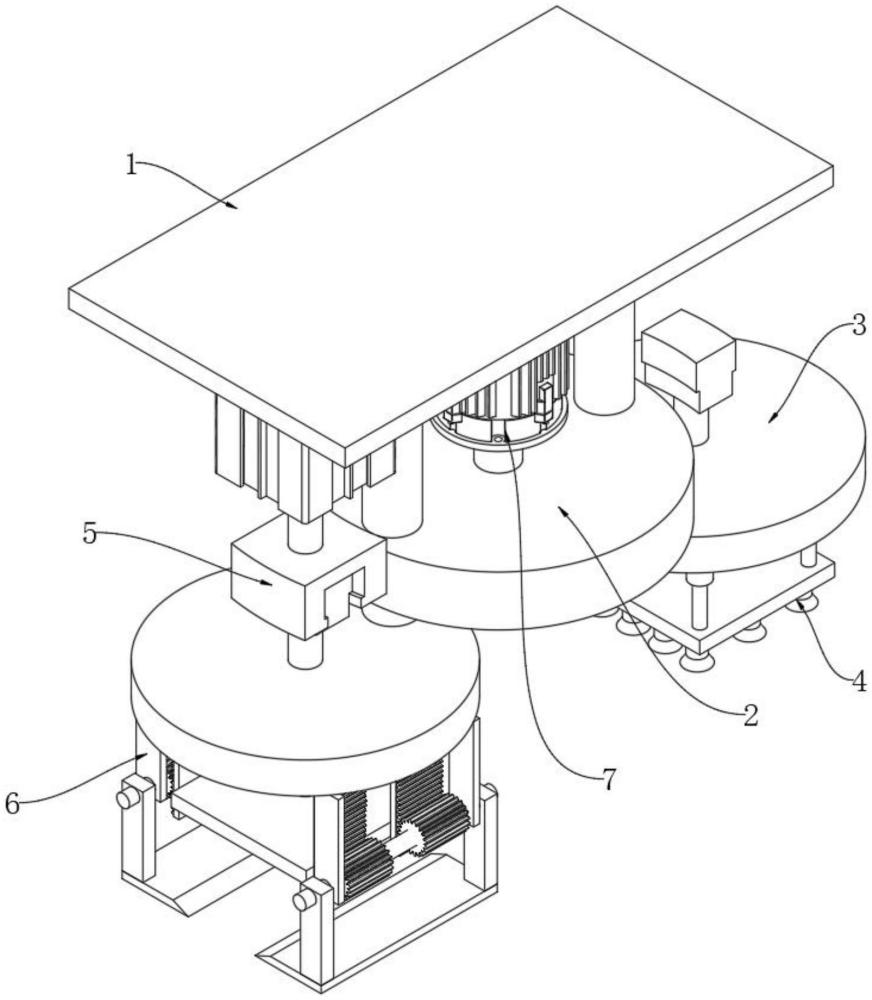
3、一种机器人末端复合夹持机构,包括安装板,所述安装板下端中部固定连接有电机,所述安装板下端中部和电机输出端共同转动连接有旋转结构,所述旋转结构下端对称固定连接有推进连接结构,位于左侧的所述推进连接结构下部固定连接有吸附加持结构,位于右侧的所述推进连接结构部固定连接有机械爪夹持结构,所述安装板下端右部固定连接有推进结构。
4、优选的,所述旋转结构包括底盘,所述底盘上端中部固定连接有贯穿底盘上端延伸至底盘下部的旋转轴,所述电机输出端与旋转轴上端固定连接,所述底盘上端左部和上端右部对称固定连接有贯穿底盘上端延伸至底盘下部的连接柱,两个所述连接柱上端与安装板下端转动连接。
5、优选的,所述推进连接结构包括连接块一,所述连接块一下端固定连接有推进轴,所述推进轴下端固定连接有支撑盘且推进轴下端贯穿支撑盘上端延伸至支撑盘下部,位于同侧的所述支撑盘上端与连接柱下端固定连接。
6、优选的,所述吸附加持结构包括底板一,所述底板一上端中部与同侧的推进轴下端固定连接,所述底板一上端四周均固定连接有伸缩杆,四个所述伸缩杆上端共同与同侧的支撑盘下端固定连接,所述底板一下端固定连接有若干吸盘。
7、优选的,所述推进结构包括液压缸,所述液压缸上端与安装板下端固定连接,所述推进结构活塞杆输出端固定连接有连接块二,所述连接块二下端开设有限位槽,所述限位槽内腔与同侧的连接块一外表面活动连接。
8、优选的,所述机械爪夹持结构包括底板二,所述底板二上端中部与同侧的推进轴下端固定连接,所述底板二前端与后端对称固定连接有两个齿条,两个所述齿条均啮合连接有齿轮,两个所述齿轮内表面共同固定连接有传动轴,所述传动轴外表面左部和外表面右部均转动连接有连接板一,两个所述连接板一上端共同与同侧的支撑盘下端固定连接,所述传动轴外表面左端与外表面右端均固定连接有连接板二,两个所述连接板二下端共同固定连接有夹板。
9、与现有技术相比,本实用新型具有如下有益效果:
10、本实用新型将多个夹具集成到一个构件上,面对不同的作业对象时无需将原本的夹具拆卸下来,然后安装新的夹具,可以通过电机带动推进连接结构进行旋转,这样可以让吸附加持结构和机械爪夹持结构更换位置,从而达到更换夹具的目的,这样更换夹具后无需在更换新的夹具系统,可以缩短更换夹具的所需时间,提高了机器人的工作效率,也提高了装置的实用性和普适性。
技术特征:
1.一种机器人末端复合夹持机构,包括安装板(1),其特征在于:所述安装板(1)下端中部固定连接有电机(7),所述安装板(1)下端中部和电机(7)输出端共同转动连接有旋转结构(2),所述旋转结构(2)下端对称固定连接有推进连接结构(3),位于左侧的所述推进连接结构(3)下部固定连接有吸附加持结构(4),位于右侧的所述推进连接结构(3)部固定连接有机械爪夹持结构(6),所述安装板(1)下端右部固定连接有推进结构(5)。
2.根据权利要求1所述的一种机器人末端复合夹持机构,其特征在于:所述旋转结构(2)包括底盘(21),所述底盘(21)上端中部固定连接有贯穿底盘(21)上端延伸至底盘(21)下部的旋转轴(22),所述电机(7)输出端与旋转轴(22)上端固定连接,所述底盘(21)上端左部和上端右部对称固定连接有贯穿底盘(21)上端延伸至底盘(21)下部的连接柱(23),两个所述连接柱(23)上端与安装板(1)下端转动连接。
3.根据权利要求1所述的一种机器人末端复合夹持机构,其特征在于:所述推进连接结构(3)包括连接块一(31),所述连接块一(31)下端固定连接有推进轴(32),所述推进轴(32)下端固定连接有支撑盘(33)且推进轴(32)下端贯穿支撑盘(33)上端延伸至支撑盘(33)下部,位于同侧的所述支撑盘(33)上端与连接柱(23)下端固定连接。
4.根据权利要求3所述的一种机器人末端复合夹持机构,其特征在于:所述吸附加持结构(4)包括底板一(41),所述底板一(41)上端中部与同侧的推进轴(32)下端固定连接,所述底板一(41)上端四周均固定连接有伸缩杆(42),四个所述伸缩杆(42)上端共同与同侧的支撑盘(33)下端固定连接,所述底板一(41)下端固定连接有若干吸盘(43)。
5.根据权利要求3所述的一种机器人末端复合夹持机构,其特征在于:所述推进结构(5)包括液压缸(51),所述液压缸(51)上端与安装板(1)下端固定连接,所述推进结构(5)活塞杆输出端固定连接有连接块二(52),所述连接块二(52)下端开设有限位槽(53),所述限位槽(53)内腔与同侧的连接块一(31)外表面活动连接。
6.根据权利要求3所述的一种机器人末端复合夹持机构,其特征在于:所述机械爪夹持结构(6)包括底板二(61),所述底板二(61)上端中部与同侧的推进轴(32)下端固定连接,所述底板二(61)前端与后端对称固定连接有两个齿条(62),两个所述齿条(62)均啮合连接有齿轮(63),两个所述齿轮(63)内表面共同固定连接有传动轴(65),所述传动轴(65)外表面左部和外表面右部均转动连接有连接板一(64),两个所述连接板一(64)上端共同与同侧的支撑盘(33)下端固定连接,所述传动轴(65)外表面左端与外表面右端均固定连接有连接板二(66),两个所述连接板二(66)下端共同固定连接有夹板(67)。
技术总结
本技术公开了一种机器人末端复合夹持机构,具体涉及机器人末端执行器技术领域,包括安装板,所述安装板下端中部固定连接有电机,所述旋转结构下端对称固定连接有推进连接结构,位于左侧的所述推进连接结构下部固定连接有吸附加持结构,位于右侧的所述推进连接结构部固定连接有机械爪加持结构,所述安装板下端右部固定连接有推进结构。本技术所述的一种机器人末端复合夹持机构,面对不同的作业对象时无需将原本的夹具拆卸下来,然后安装新的夹具,可以通过电机带动推进连接结构进行旋转,这样可以让吸附加持结构和机械爪夹持结构更换位置,可以缩短更换夹具的所需时间,提高了机器人的工作效率,也提高了装置的实用性和普适性。
技术研发人员:操栋凌,张坤
受保护的技术使用者:南京亿科自动化有限公司
技术研发日:20230802
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!