一种选煤厂用的轨道巡检机器人的制作方法
本技术涉及选煤厂轨道巡检,尤其涉及一种选煤厂用的轨道巡检机器人。
背景技术:
1、选煤厂是煤炭行业中重要的生产环节之一,其主要功能是对原煤进行洗选、干燥、筛分等处理,以提高煤炭质量和利用率。选煤厂中存在大量设备和管道等需要进行巡检和维护。传统地选煤厂巡检工作主要由人工完成,在巡检过程中需要爬高、越障、跳跃等,不仅工作效率低,而且存在安全隐患。此外,人工巡检也难以对设备的温度、振动、声音等参数进行精确测量和分析,容易遗漏或误判设备的异常情况,影响选煤厂的正常运行和生产效率。
2、为了解决上述问题,有人提出了一种轨道式巡检机器人,该机器人可以沿着选煤厂中的轨道进行自动或遥控巡检,通过搭载的各种传感器和摄像头对设备和管道进行监测和识别,并将数据传输到后台系统进行分析和处理。该机器人可以提高巡检的效率和质量,减少人工劳动强度和风险,保障选煤厂的安全运行。
3、然而,现有的轨道式巡检机器人仍然存在一些不足之处,例如:
4、机器人的结构较为复杂,重量较大,运行时需要消耗较多的能源;
5、机器人的传感器和摄像头的数量和位置较为固定,不能根据不同的设备和管道进行灵活调整,导致部分区域无法覆盖或测量不准确;
6、机器人的控制方式较为单一,不能实现多种模式的切换和协调,例如自主巡检、定点巡检、遥控巡检等。
7、因此,本发明旨在提供一种改进的轨道式巡检机器人,以克服现有技术中存在的上述部分不足。
技术实现思路
1、为了弥补现有技术的不足,本实用新型提供了一种选煤厂用的轨道巡检机器人,能够通过传感器一和传感器二的工作,在轨道上运动实现对选煤厂的巡检,传感器一和传感器二能够转动,实现多角度巡检。
2、本实用新型是通过如下技术方案实现的:
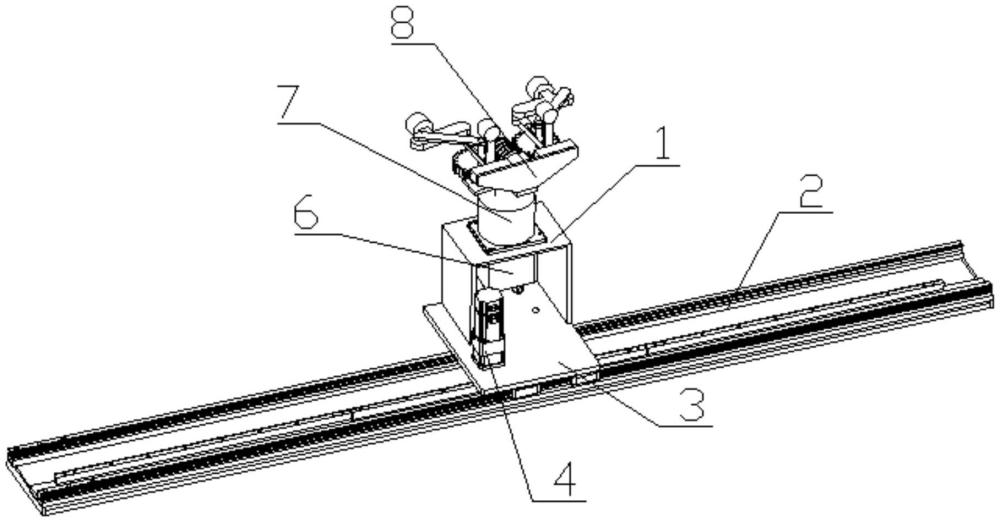
3、一种选煤厂用的轨道巡检机器人,包括支撑板,其特征在于:所述支撑板的上侧固定连接支座,所述支座的上侧固定连接转动电缸的外壳,所述转动电缸的转动杆固定连接横板下侧中心,所述横板上侧中心固定连接块的一端,所述连接块另一端固定连接三角板,所述三角板的一侧两端分别固定直槽杆,每个所述直槽杆内分别设置有滑块;
4、每个所述滑块的一侧分别固定横向槽杆的一端,每个所述横向槽杆的另一端分别铰接t形杆的横杆一端,每个所述t形杆的竖杆端部分别固定传感器一。
5、作为本技术方案的进一步限定,每个所述t形杆的另一端分别铰接连杆的一端,每个所述连杆的另一端分别铰接转轴的上端,每个所述转轴分别穿过对应的所述横向槽杆的滑槽,每个所述转轴的下端分别固定蜗轮,两个所述蜗轮的中心轴分别轴承连接所述横板的两端,每个所述蜗轮均配合蜗杆,所述蜗杆的中心轴固定电机一的输出轴,所述电机一固定所述三角板。
6、作为本技术方案的进一步限定,所述直槽杆内设置有导向轴,所述导向轴穿过对应的所述滑块,所述导向轴的两端分别固定对应的所述直槽杆的两端。
7、作为本技术方案的进一步限定,所述横向槽杆的一端上侧固定立杆,所述立杆的上端固定连接传感器二。
8、作为本技术方案的进一步限定,所述支座的下侧安装有控制器。
9、作为本技术方案的进一步限定,所述支撑板的下侧固定轨道匹配的移动块,所述支撑板的下侧固定有麦克斯韦轮,所述麦克斯韦轮连接电机二,所述电机二固定在所述支撑板上侧,所述麦克斯韦轮设置在所述轨道的上侧。
10、本实用新型的有益效果是:
11、结构简单,重量轻,运行时能耗低;
12、能够对选煤厂中的各种设备和管道进行多方位、多角度的巡检和监测;
13、操作灵活,能够实现多种模式的切换和协调,例如自主巡检、定点巡检、遥控巡检等,并且能够根据后台系统的指令或预设的程序进行自主或遥控巡检;
14、能够通过传感器一和传感器二的工作,在轨道上运动实现对选煤厂的巡检,传感器一和传感器二能够转动,实现多角度巡检。
技术特征:
1.一种选煤厂用的轨道巡检机器人,包括支撑板(3),其特征在于:所述支撑板(3)的上侧固定连接支座(1),所述支座(1)的上侧固定连接转动电缸(7)的外壳,所述转动电缸(7)的转动杆固定连接横板(9)下侧中心,所述横板(9)上侧中心固定连接块(91)的一端,所述连接块(91)另一端固定连接三角板(10),所述三角板(10)的一侧两端分别固定直槽杆(12),每个所述直槽杆(12)内分别设置有滑块(20);
2.根据权利要求1所述的一种选煤厂用的轨道巡检机器人,其特征在于:每个所述t形杆(17)的另一端分别铰接连杆(15)的一端,每个所述连杆(15)的另一端分别铰接转轴(19)的上端,每个所述转轴(19)分别穿过对应的所述横向槽杆(18)的滑槽,每个所述转轴(19)的下端分别固定蜗轮(11),两个所述蜗轮(11)的中心轴分别轴承连接所述横板(9)的两端,每个所述蜗轮(11)均配合蜗杆(22),所述蜗杆(22)的中心轴固定电机一(23)的输出轴,所述电机一(23)固定所述三角板(10)。
3.根据权利要求2所述的一种选煤厂用的轨道巡检机器人,其特征在于:所述直槽杆(12)内设置有导向轴(24),所述导向轴(24)穿过对应的所述滑块(20),所述导向轴(24)的两端分别固定对应的所述直槽杆(12)的两端。
4.根据权利要求3所述的一种选煤厂用的轨道巡检机器人,其特征在于:所述横向槽杆(18)的一端上侧固定立杆(14),所述立杆(14)的上端固定连接传感器二(13)。
5.根据权利要求1所述的一种选煤厂用的轨道巡检机器人,其特征在于:所述支座(1)的下侧安装有控制器(6)。
6.根据权利要求1所述的一种选煤厂用的轨道巡检机器人,其特征在于:所述支撑板(3)的下侧固定轨道(2)匹配的移动块,所述支撑板(3)的下侧固定有麦克斯韦轮,所述麦克斯韦轮连接电机二(4),所述电机二(4)固定在所述支撑板(3)上侧,所述麦克斯韦轮设置在所述轨道(2)的上侧。
技术总结
本技术公开了一种选煤厂用的轨道巡检机器人,包括支撑板,其特征在于:所述支撑板的上侧固定连接支座,所述支座的上侧固定连接转动电缸的外壳,所述转动电缸的转动杆固定连接横板下侧中心,所述横板上侧中心固定连接块的一端,所述连接块另一端固定连接三角板,所述三角板的一侧两端分别固定直槽杆,每个所述直槽杆内分别设置有滑块;每个所述滑块的一侧分别固定横向槽杆的一端,每个所述横向槽杆的另一端分别铰接T形杆的横杆一端,每个所述T形杆的竖杆端部分别固定传感器一。本技术提供了一种选煤厂用的轨道巡检机器人,能够通过传感器一和传感器二的工作,实现对轨道的巡检,传感器一和传感器二能够转动,实现多角度巡检。
技术研发人员:杨志龙,王新欣,连浩,姜向恒
受保护的技术使用者:山东山控信息科技有限公司
技术研发日:20230803
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!